ROTACIONE I TRANSLATORNE POVRSI
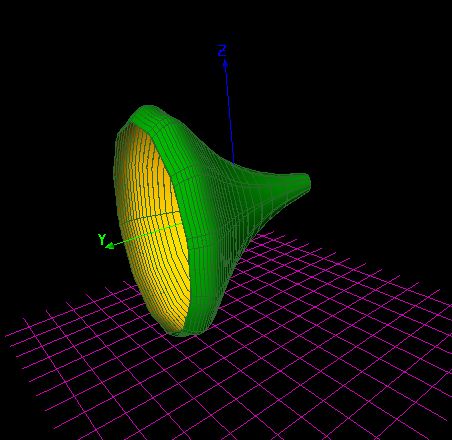
Dini
X. 2*cos(u)*sin(v)Y: (cos(v)+2*log(tan(v/2)))Z: 3*sin(u)*sin(v)
0<u<12.4
0.1<v<2
Rotacija oko Y-OSE
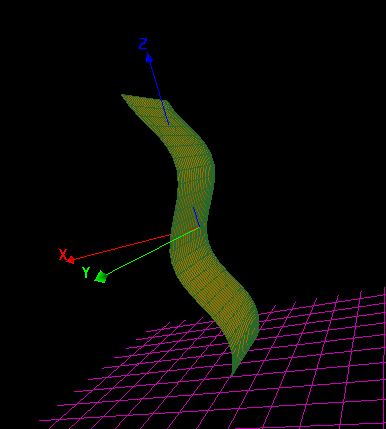
X: 6*sin(u)*cos(u)Y: 10*sin(v)Z: 10*u
5<u<10
-1<v<1