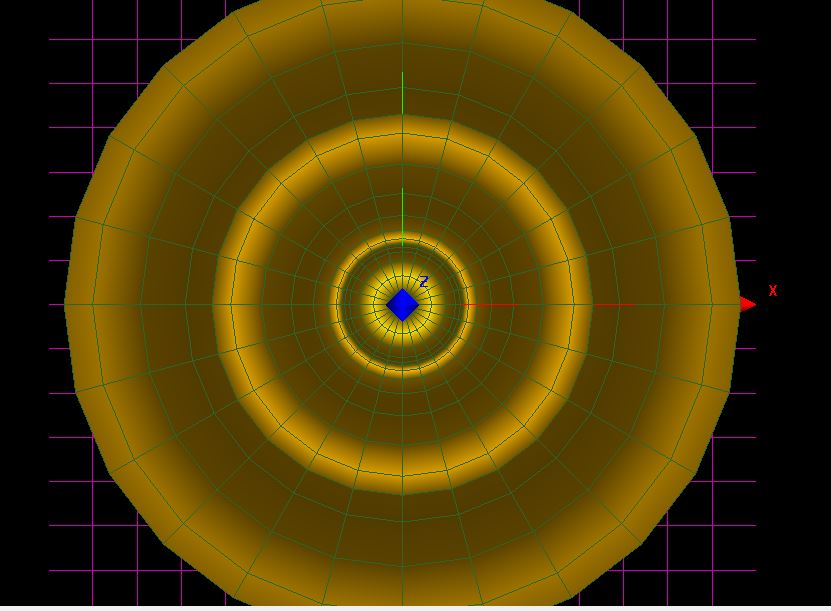
rotacija:
x=u*4cos(v)
y=u*4sin(v)
z=sin(5*pi*u)
0<=u=4*pi
0<=v=4*pi
translacija:
x=sin(5*u)*4
y=4*u+cos(u)
z=4