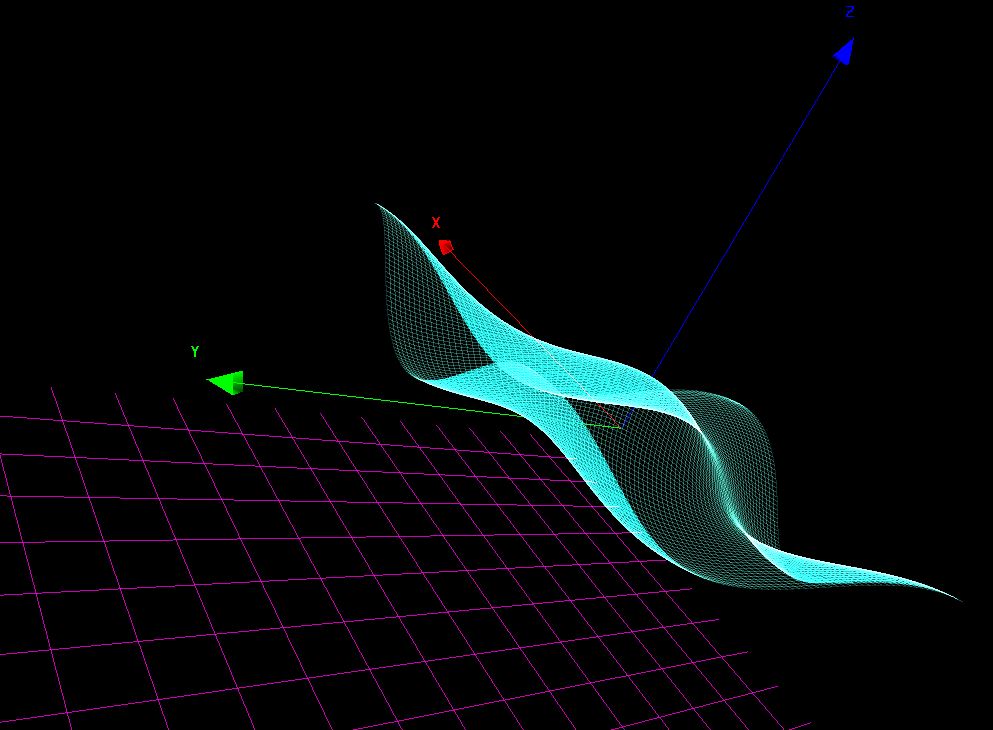
translacija:
x=-2*u+sin(v)+2*v
y=-cos(u)*sin(v)-2*u
z=cos(u)*cos(v)/0.5-sin(v)
0<=u<=2*pi 0<=v<=2*pi
rotacija oko y ose:
x=v*2*cos(u)+cos(u)
y=v^2+(sin(u)*cos(v)+u)+sin(u)
z=v*sin(u)-u
o<=u<=6*pi 0<=v<=2*pi

translacija:
x=-2*u+sin(v)+2*v
y=-cos(u)*sin(v)-2*u
z=cos(u)*cos(v)/0.5-sin(v)
0<=u<=2*pi 0<=v<=2*pi
rotacija oko y ose:
x=v*2*cos(u)+cos(u)
y=v^2+(sin(u)*cos(v)+u)+sin(u)
z=v*sin(u)-u
o<=u<=6*pi 0<=v<=2*pi