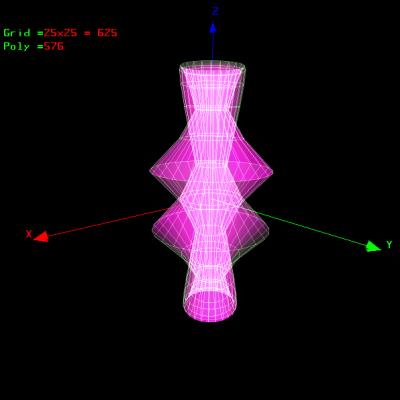
Rotacija:
X=f(u) sin(u)/2
Y=g(u) cos(u)^20
Z=h(u) sin(u)*2+cos(u)/2
0<=u<=2*pi
rotacija oko Z-ose
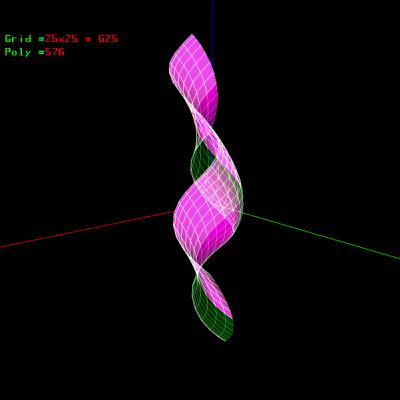
Translacija:
X=f(u) sin(u)/2 X=f(v) sin(v)
Y=g(u) sin(u)^2 Y=g(v) cos(v)
Z=h(u) sin(u)*2 Z=g(v) v
0<=U<=5 0<=V<=10