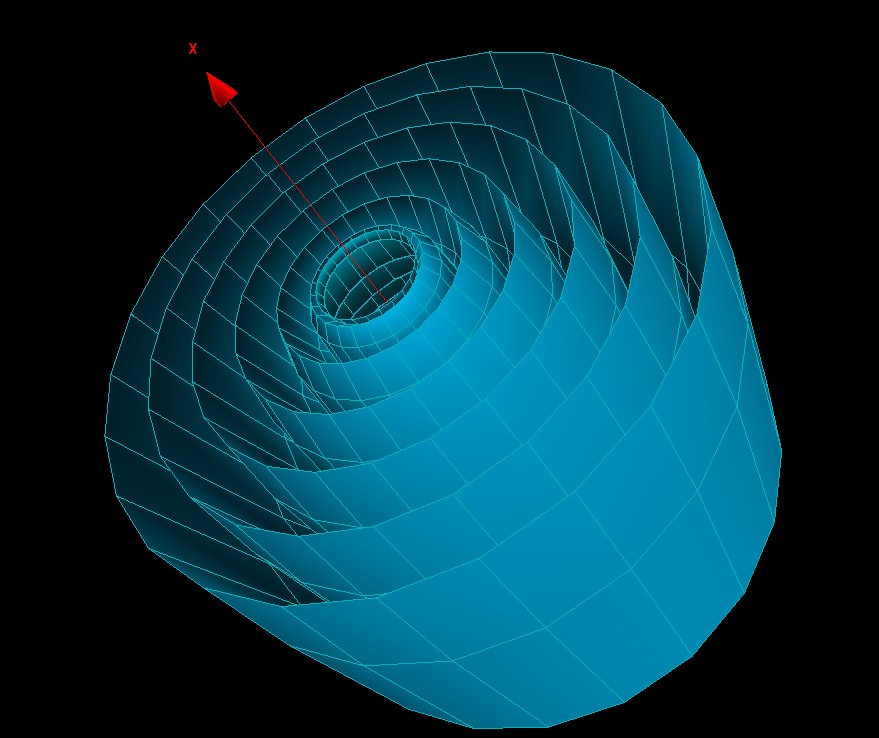
a. Sinus
Xf(u)=5*u*sin(7*u+8)*cos(u+3)
Yg(u)=4*u
Zh(u)=12+sin(6*u)
0<=U<=6*pi
Rotacija oko x ose.
b. Sinus
Xf(u)==sin(u)*4
Yg(u)==2*u+sin(u)
Zh(u =sin(u)
0<=U<=2*pi
Xf(v)=cos(v)
Yg(v)=4
Zg(v)=2*cos(v)
0<=V<=3*pi
a. Sinus
Xf(u)=5*u*sin(7*u+8)*cos(u+3)
Yg(u)=4*u
Zh(u)=12+sin(6*u)
0<=U<=6*pi
Rotacija oko x ose.
b. Sinus
Xf(u)==sin(u)*4
Yg(u)==2*u+sin(u)
Zh(u =sin(u)
0<=U<=2*pi
Xf(v)=cos(v)
Yg(v)=4
Zg(v)=2*cos(v)
0<=V<=3*pi

