Zadatak 04
MAT 04 - Rotacione i translatorne površi
MAT 04 - Rotacione i translatorne površi
Re: MAT 04 - Rotacione i translatorne površi
Graficki prikazati povrs koja se dobija rotacijom parametarski definisane krive oko izabrane ose.
U ovom zadatku koristiti neki od ranije koriscenih programa ili K3D Surf (Tools, Builder, Revolve...; kontrola boje: Options; Kontrola prikaza: Parametric, Drawing Options).
U tekstualnom delu zadataka dati parametarsku jednacinu krive linije, navesti osu oko koje rotira ova linija, kao i granice parametara u i v.
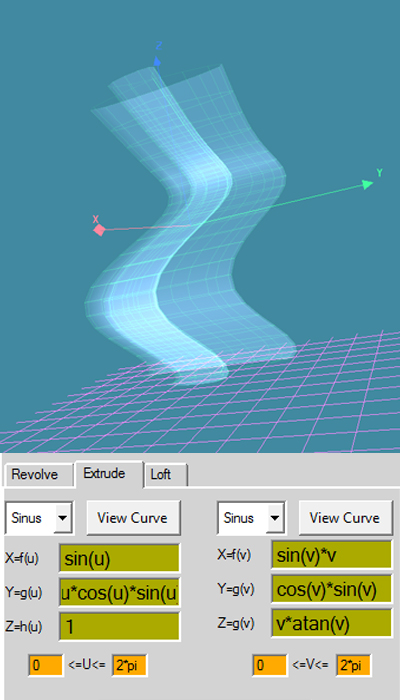
Kao reply na taj post graficki prikazati povrs koja se dobija translatornim kretanjem parametarski definisane krive linije duz neke druge linije.
Koristiti takodje K3D Surf (Tools, Builder, Extrude...; kontrola boje: Options; Kontrola prikaza: Parametric, Drawing Options).
U tekstualnom delu zadatka dati parametarski oblik obe linije, kao i granice parametara u i v.
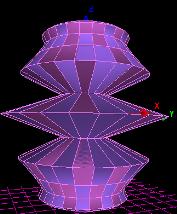
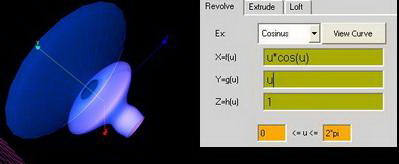
Re: MAT 04 - Rotacione i translatorne površi
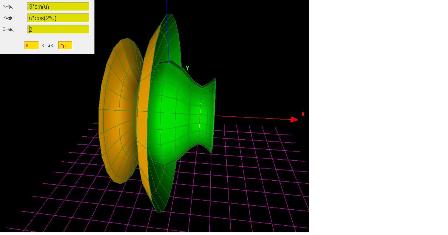
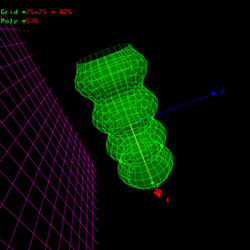
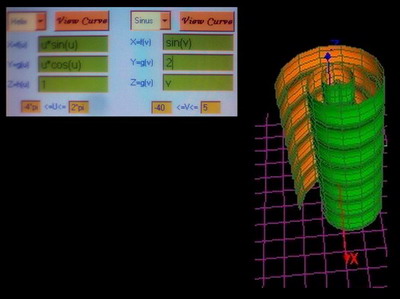
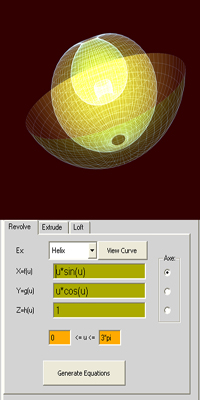
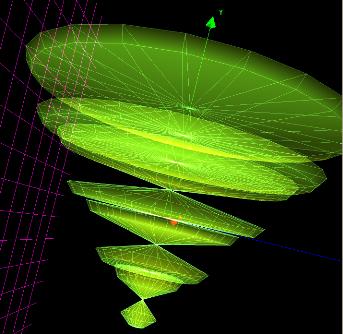
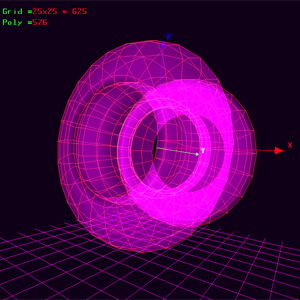
K3DSurf
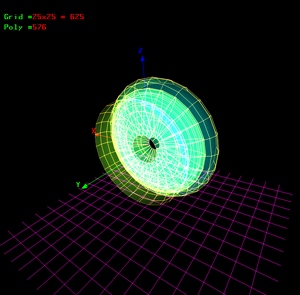
parametri:
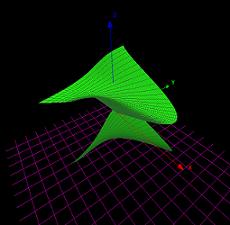
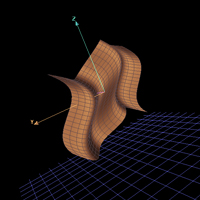
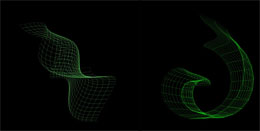
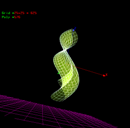
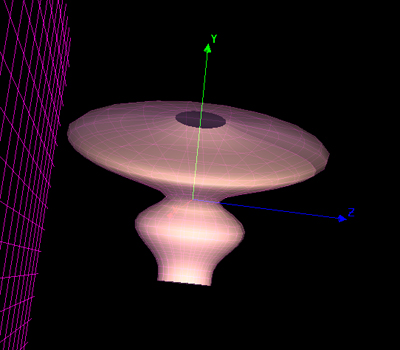
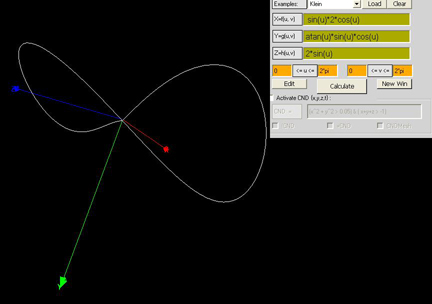
x: 5*sin(u)+cos(tan(2*u))
y: u+sin(u)
z: 2
rotacija oko Y-ose
granice: 0<=u<=2*pi
parametri:
x: 5*sin(u)+cos(tan(2*u))
y: u+sin(u)
z: 2
rotacija oko Y-ose
granice: 0<=u<=2*pi
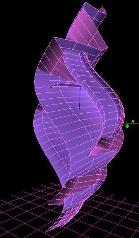
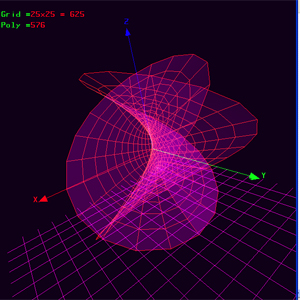
Re: MAT 04 - Rotacione i translatorne površi
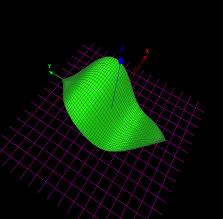
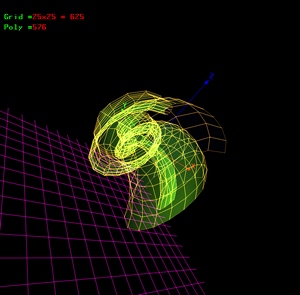
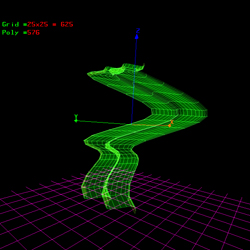
x: 5*sin(u)+cos(tan(2*u))
y: u+sin(u)
z: 2
0<=u<=5*pi
y: u+sin(u)
z: 2
0<=u<=5*pi
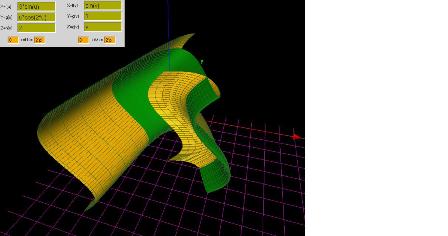

 rotacija oko z ose
rotacija oko z ose
 translacija po z-osi?
translacija po z-osi?Re: MAT 04 - Rotacione i translatorne površi
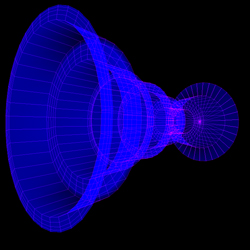
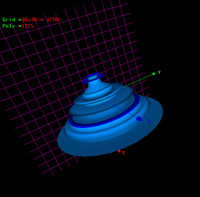
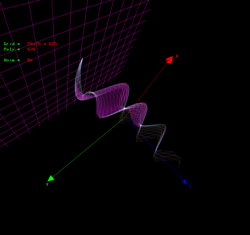
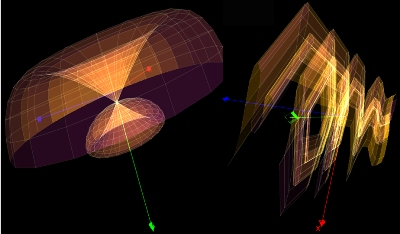
ja ne znam da li je ovo dobro...radila sam u 3d grapher-u jer nisam uspela da skinem k3d surf
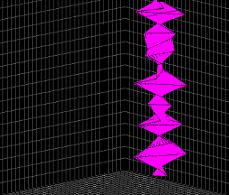
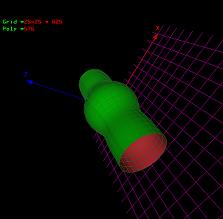
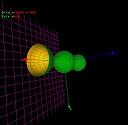
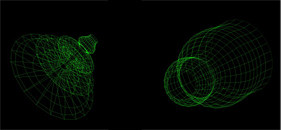
cylindrical
a=sin(4*v)
R=5*cos(v)*sin(u)
Z=v
-20<u<40 steps 35
-5<v<30 steps 40
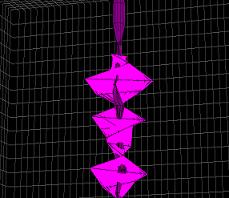
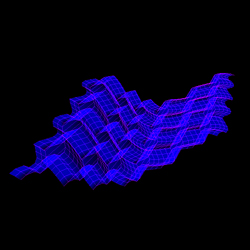
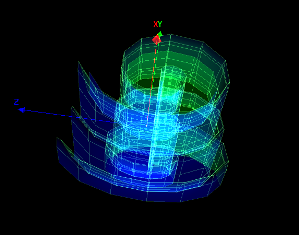
Re: MAT 04 - Rotacione i translatorne površi
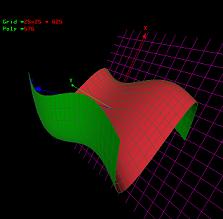
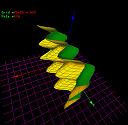
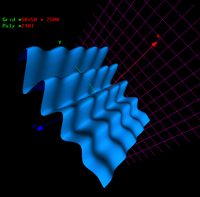
rotacija je oko y ose u proslom
parametri:
a=sin(4*v),R=5*cos(v)*sin(u),Z=v
a=cos(3*v)*5*sin(u),R=sin(u*5),Z=u
-10<u<40 steps 35
-5<v<20 steps 35
Re: MAT 04 - Rotacione i translatorne površi
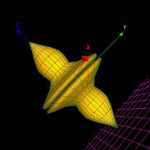
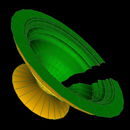
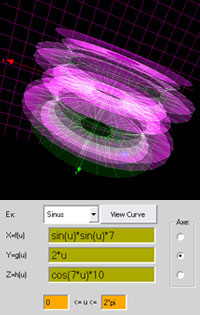
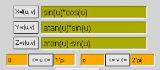
K3DSurf
parametri:
x: cos(u)
y: 2*sin(7*u)*sin(u)
z: 2*cos(u)
rotacija oko Z-ose
granice: 0<=u<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
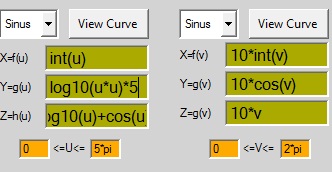
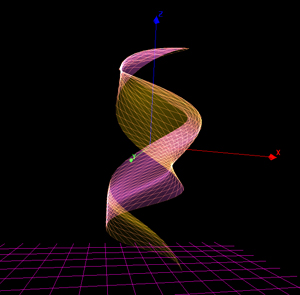
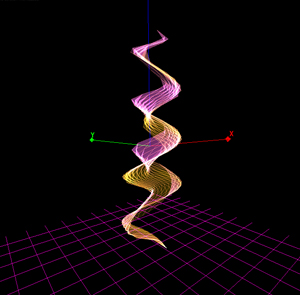
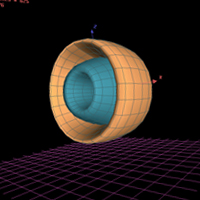
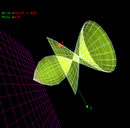
k3dsurf
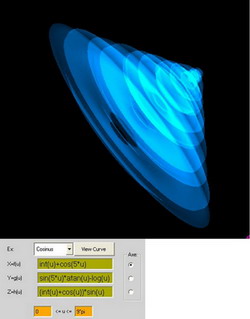
x=int(u)
y=log10(u*u)
z=log10(u)+cos(u)
0*pi<=u<=2*pi
rotacija oko x-ose
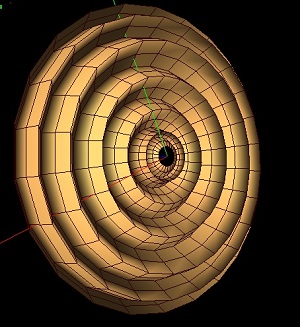
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
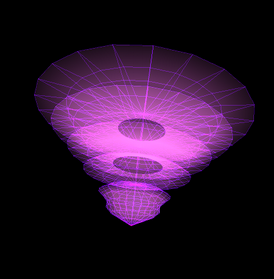
Kriva: 
Parametri krive: 
Rotaciona povrs formirana rotacijom oko z ose : 
Parametri: 


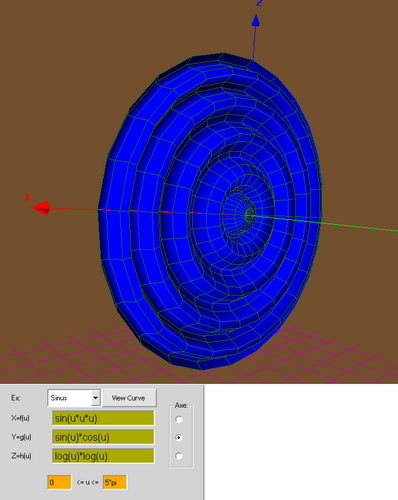
Re: MAT 04 - Rotacione i translatorne površi
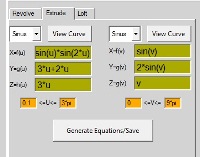
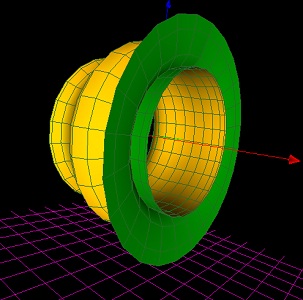
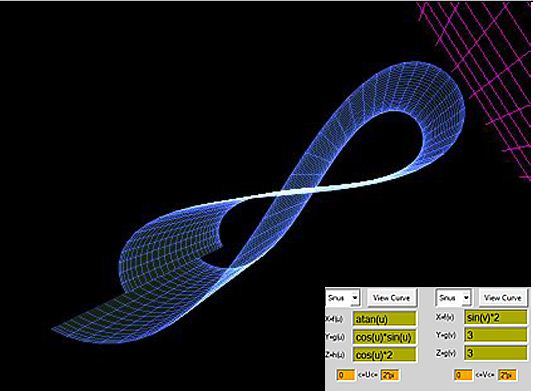
Xf(u)=10*sin(u)*cos(u)
Yg(u)=(log(u)*log(u*2)) + 0.5*u
Zh(u)=log(u)*log(u)
0=u=4*pi oko ose z
Yg(u)=(log(u)*log(u*2)) + 0.5*u
Zh(u)=log(u)*log(u)
0=u=4*pi oko ose z
Re: MAT 04 - Rotacione i translatorne površi
X = cos(u)*sin(2*v)
Y = sin(u)*sin(2*v)
Z = sin(v)-u
With U[ 0, 2*pi] And V[ -pi/2, pi/2]
Y = sin(u)*sin(2*v)
Z = sin(v)-u
With U[ 0, 2*pi] And V[ -pi/2, pi/2]

Re: MAT 04 - Rotacione i translatorne površi
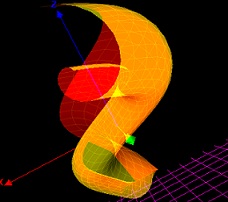
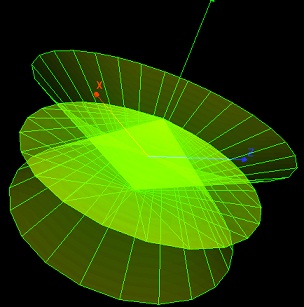
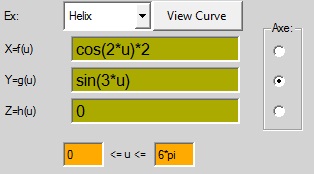
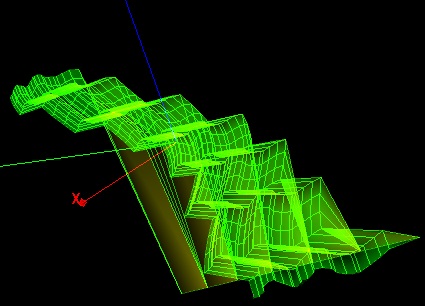
x=f(u) cos(2*u)
y=g(u) sin(3*u)
z=h(u) 0
rotacija oko y ose
u (0;4*pi)

y=g(u) sin(3*u)
z=h(u) 0
rotacija oko y ose
u (0;4*pi)
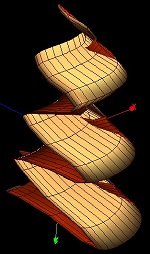
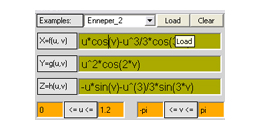
Re: MAT 04 - Rotacione i translatorne površi
x=u*cos(v)-u^3/3*cos(3*v)-sin(v)
y=u^2*cos(2*v)
z=u*sin(t)-u^(6)/3*sin(4+v)
0.6=u=1.2 -3*pi=v=pi
y=u^2*cos(2*v)
z=u*sin(t)-u^(6)/3*sin(4+v)
0.6=u=1.2 -3*pi=v=pi
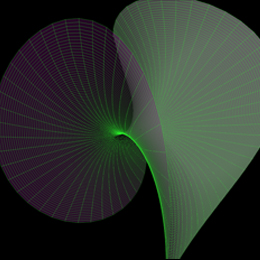
Re: MAT 04 - Rotacione i translatorne površi
i jos jedna slika
Re: MAT 04 - Rotacione i translatorne površi
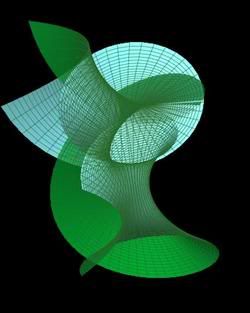
jos nesto malo interesantnije
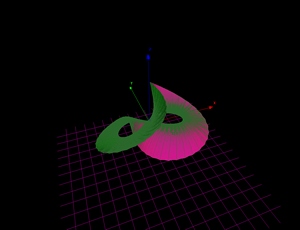
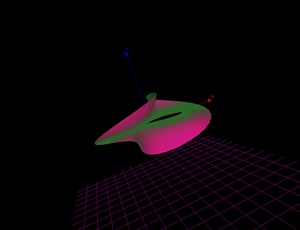
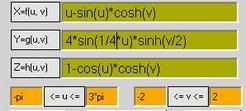
x=1.06*(-u-sin(2*u)*cosh(v))
y=1-cos(u)*cosh(v)
z=4*sin(u)*sinh(v/2)+sin(3*v)
-4pi=u=3pi -3=v=2
x=1.06*(-u-sin(2*u)*cosh(v))
y=1-cos(u)*cosh(v)
z=4*sin(u)*sinh(v/2)+sin(3*v)
-4pi=u=3pi -3=v=2
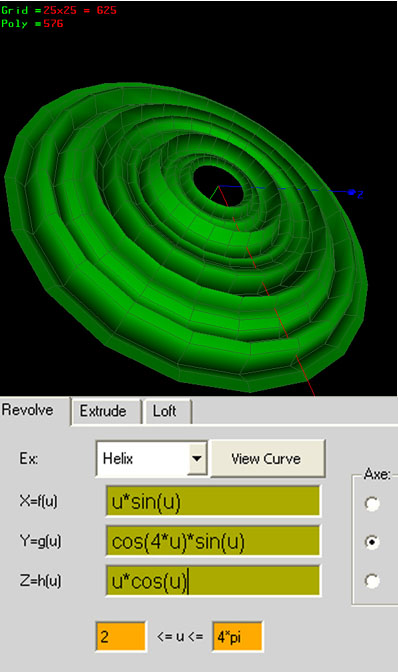
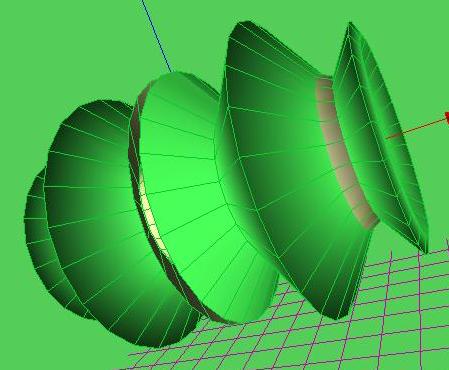
Re: MAT 04 - Rotacione i translatorne površi
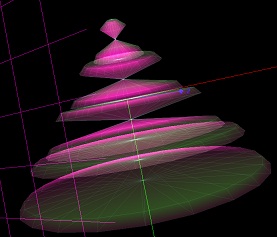
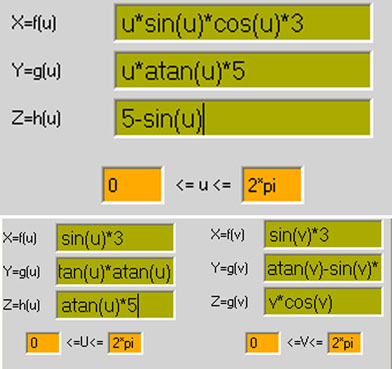
x= f(u) =u*sin(u)
y= g(u) =u*cos(u)
z= h(u) =u
-3<u<3
Rotira oko z ose.


Re: MAT 04 - Rotacione i translatorne površi
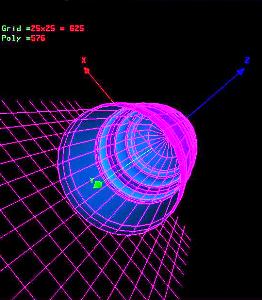
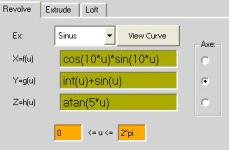
X=cos(10*u)*sin(5*u)*atan(5*u)-log(u)
y=(int(u)+cos(u))*sin(u)
z=atan(5*u)
rotacija oko y-ose
0<=u<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
k3dsurf
1.x=sin(u)*atan(u)
y=log10(u*1/4)
z=log10(u*1/2)-cos(u*2)
pi*1/3<=u<=2*pi rotira oko x ose
1.x=sin(u)*atan(u)
y=log10(u*1/4)
z=log10(u*1/2)-cos(u*2)
pi*1/3<=u<=2*pi rotira oko x ose
Re: MAT 04 - Rotacione i translatorne površi
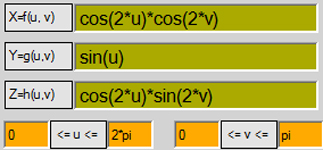
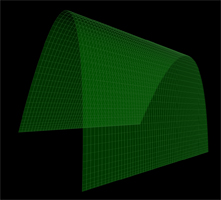
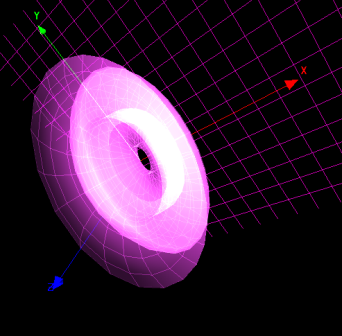
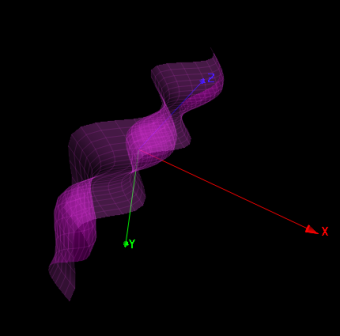
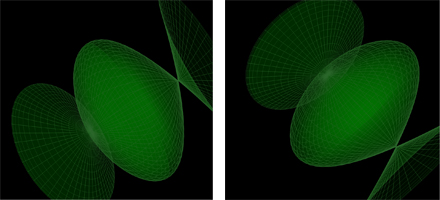
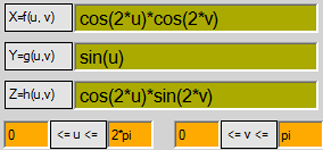
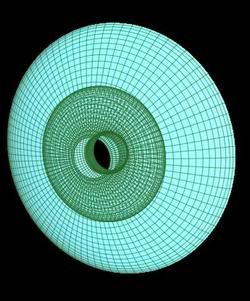
povrs:
x=f(u,v)=cos(2*u)*cos(2*v)
y=g(u,v)=sin(u)
z=h(u,v)=cos(2*u)*sin(2*v)
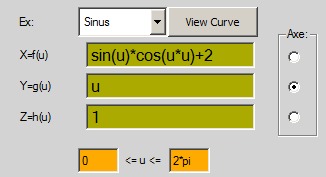
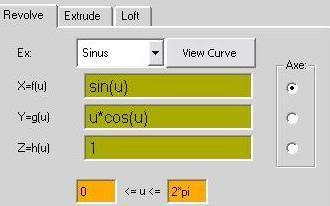
dobija se rotacijom krive:
x=f(u,v)=cos(2*u)
y=g(u,v)=sin(u)
z=h(u,v)=1
oko y-ose.
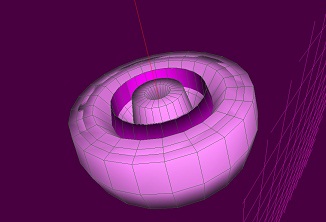
Re: MAT 04 - Rotacione i translatorne površi
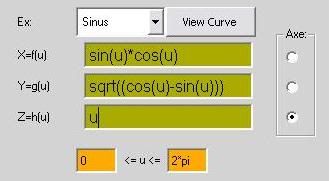
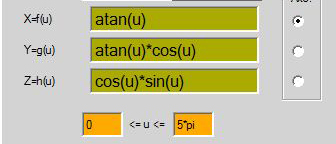
x=sin(u)*cos(u)
y=tan(u)+cos(u)+sin(u)
z=tan(u)*cos(u)
rotacija oko x ose
granice: 0<=u <= 2*pi
y=tan(u)+cos(u)+sin(u)
z=tan(u)*cos(u)
rotacija oko x ose
granice: 0<=u <= 2*pi
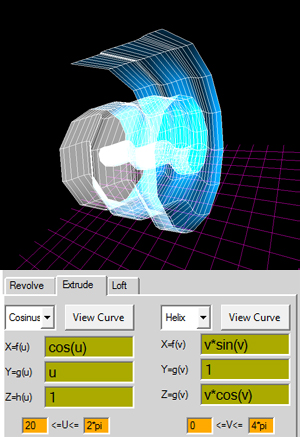
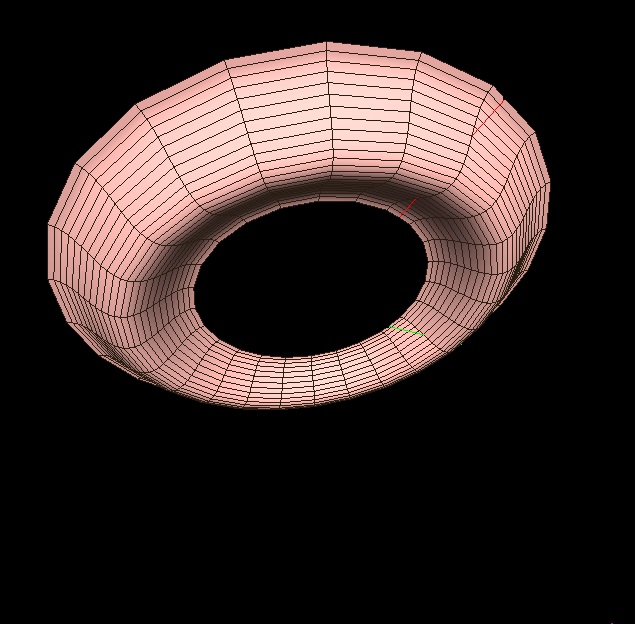
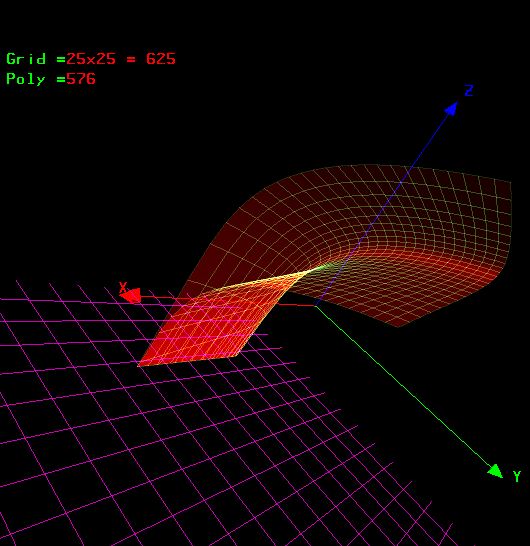
Re: MAT 04 - Rotacione i translatorne površi

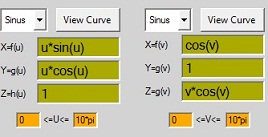
xf(u)=cos(u) xf(v)= v*sin(v)
yg(u)=u*cos(u) + 1 yg(v)=1
zh(u)=log(u)*log(u) zg(v)=v*cos(v)
u: 0 - 4*pi v: 0 - 2*pi

Re: MAT 04 - Rotacione i translatorne površi
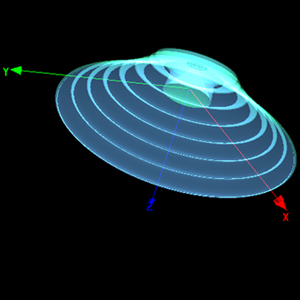
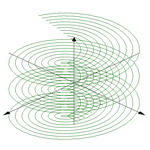
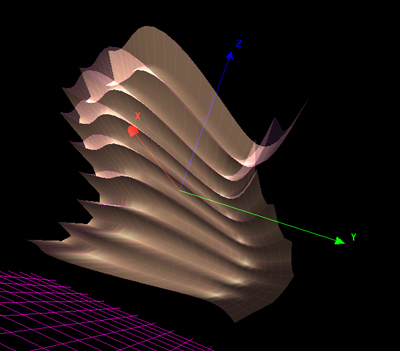
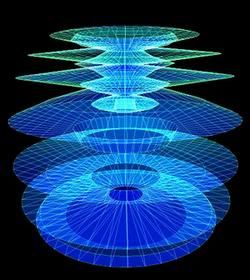
x=0.5*cos(v)-sin(v)*0.5, y=0.5*cos(v)+sin(v)*0.5, z=v
x=1*cos(v)-sin(v)*1, y=1*cos(v)+sin(v)*1, z=v
x=1.5*cos(v)-sin(v)*1.5, y=1.5*cos(v)+sin(v)*1.5, z=v
x=2*cos(v)-sin(v)*2, y=2*cos(v)+sin(v)*2, z=v
x=2.5*cos(v)-sin(v)*2.5, y=2.5*cos(v)+sin(v)*2.5, z=v
x=3*cos(v)-sin(v)*3, y=3*cos(v)+sin(v)*3, z=v
x=3.5*cos(v)-sin(v)*3.5, y=3.5*cos(v)+sin(v)*3.5, z=v
x=4*cos(v)-sin(v)*4, y=4*cos(v)+sin(v)*4, z=v
x=4.5*cos(v)-sin(v)*4.5, y=4.5*cos(v)+sin(v)*4.5, z=v
x=5*cos(v)-sin(v)*5, y=5*cos(v)+sin(v)*4, z=v
MinU=-10 MaxU=10 Steps=100
MinV=-10 MaxV=10 Steps=100
x=1*cos(v)-sin(v)*1, y=1*cos(v)+sin(v)*1, z=v
x=1.5*cos(v)-sin(v)*1.5, y=1.5*cos(v)+sin(v)*1.5, z=v
x=2*cos(v)-sin(v)*2, y=2*cos(v)+sin(v)*2, z=v
x=2.5*cos(v)-sin(v)*2.5, y=2.5*cos(v)+sin(v)*2.5, z=v
x=3*cos(v)-sin(v)*3, y=3*cos(v)+sin(v)*3, z=v
x=3.5*cos(v)-sin(v)*3.5, y=3.5*cos(v)+sin(v)*3.5, z=v
x=4*cos(v)-sin(v)*4, y=4*cos(v)+sin(v)*4, z=v
x=4.5*cos(v)-sin(v)*4.5, y=4.5*cos(v)+sin(v)*4.5, z=v
x=5*cos(v)-sin(v)*5, y=5*cos(v)+sin(v)*4, z=v
MinU=-10 MaxU=10 Steps=100
MinV=-10 MaxV=10 Steps=100
Re: MAT 04 - Rotacione i translatorne površi
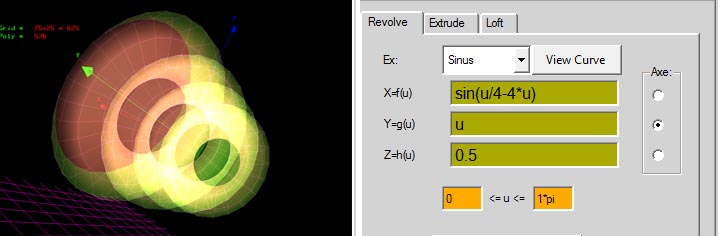
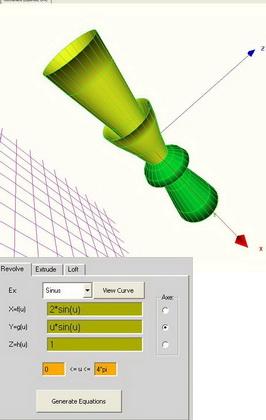
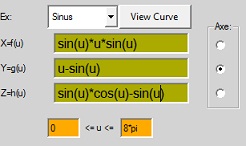
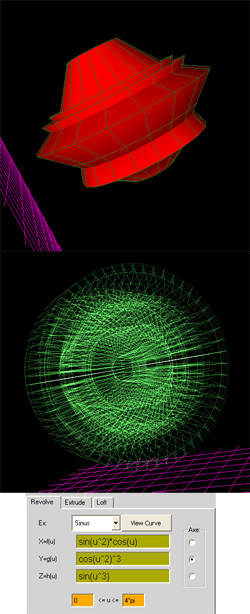
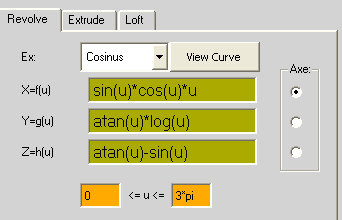
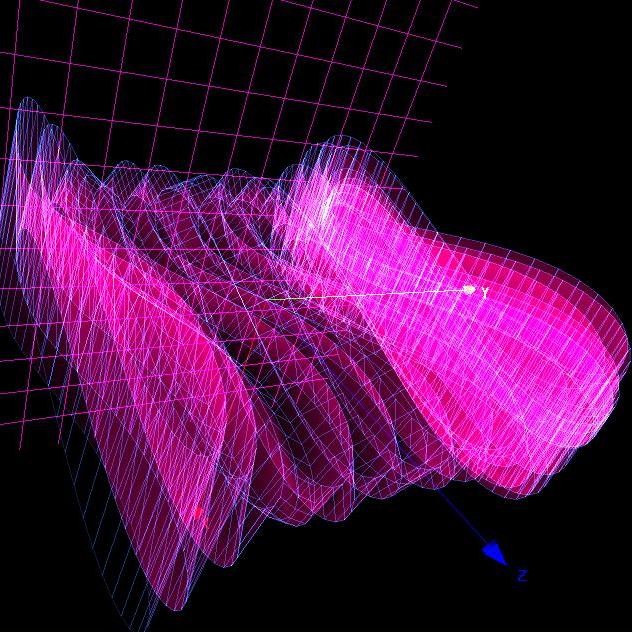
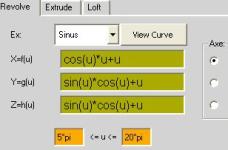
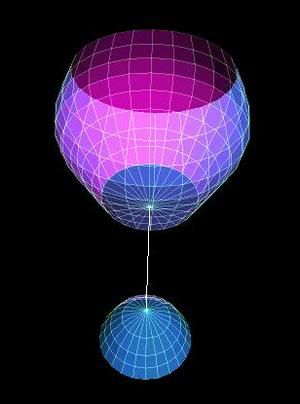
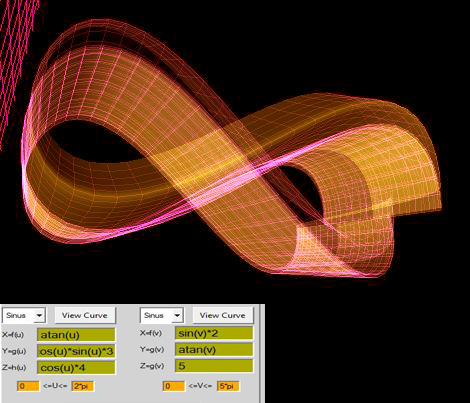
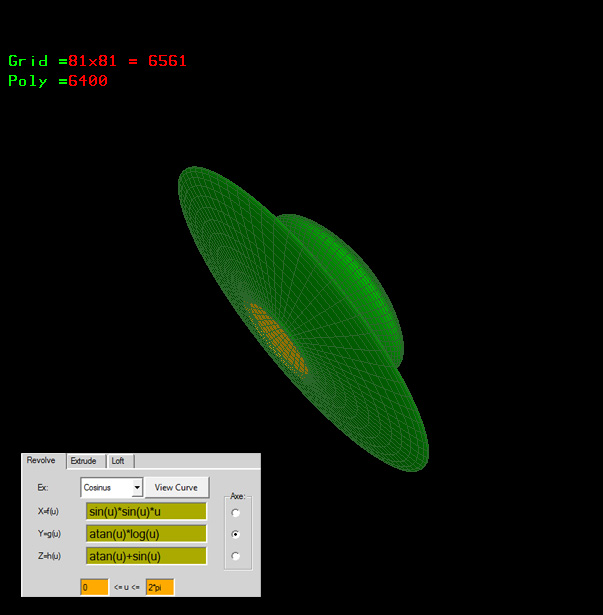
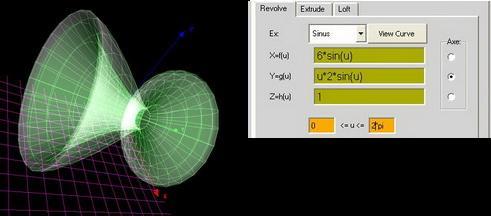
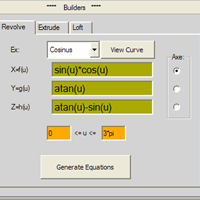
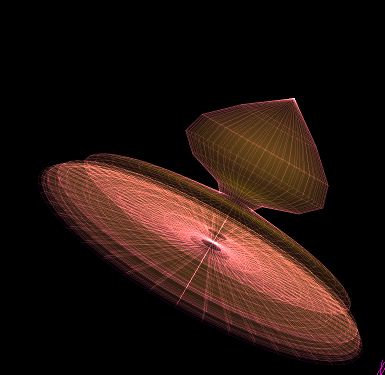
rotaciona povrs
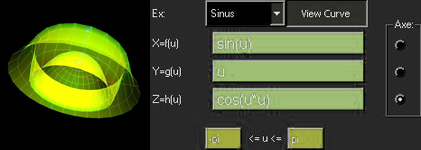
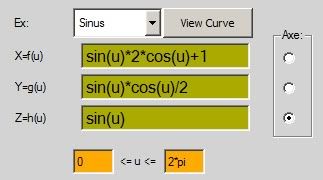
ex: sinus
x=f(u)= sin(u)*cos(u)*12
y=g(u)= atan(u)*2
z=h(u)= atan(u)-sin(u)*5
15*pi
rotacija oko z ose
ex: sinus
x=f(u)= sin(u)*cos(u)*12
y=g(u)= atan(u)*2
z=h(u)= atan(u)-sin(u)*5
15*pi
rotacija oko z ose
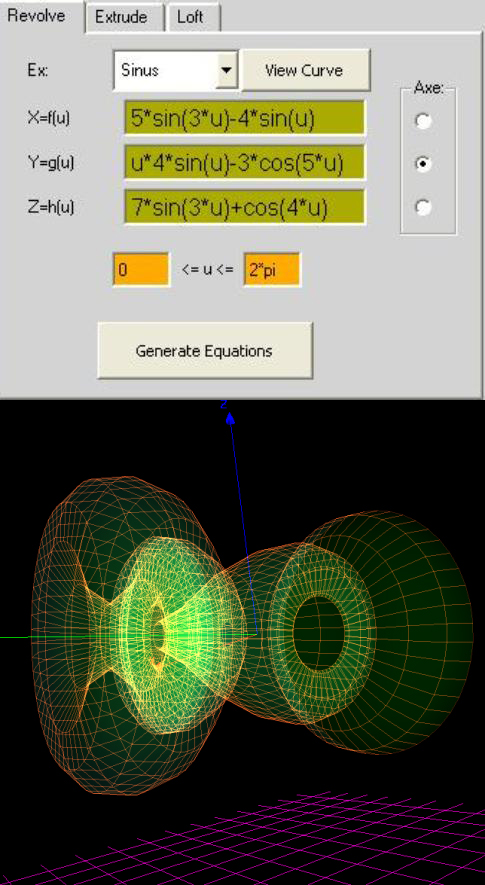
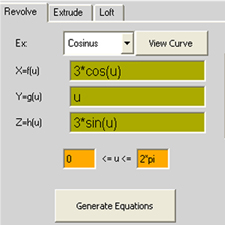
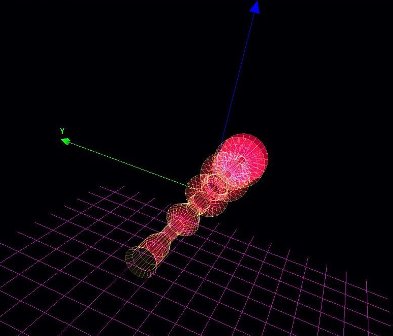
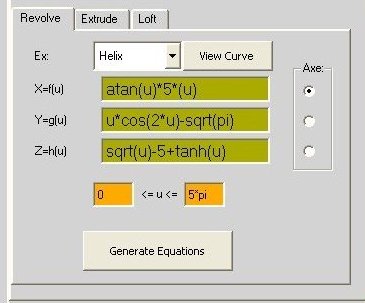
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
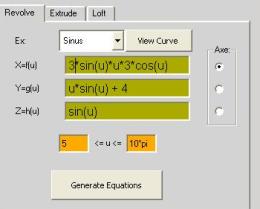
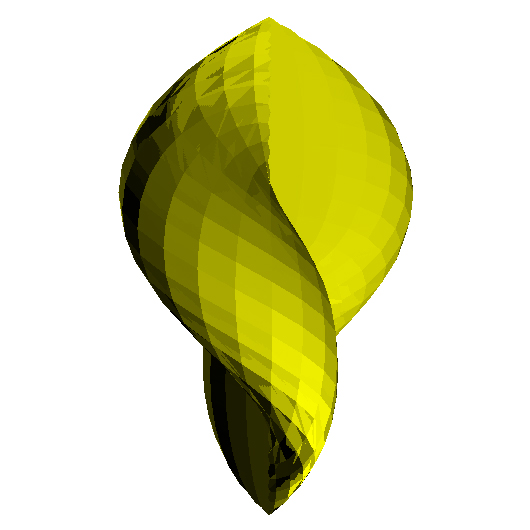
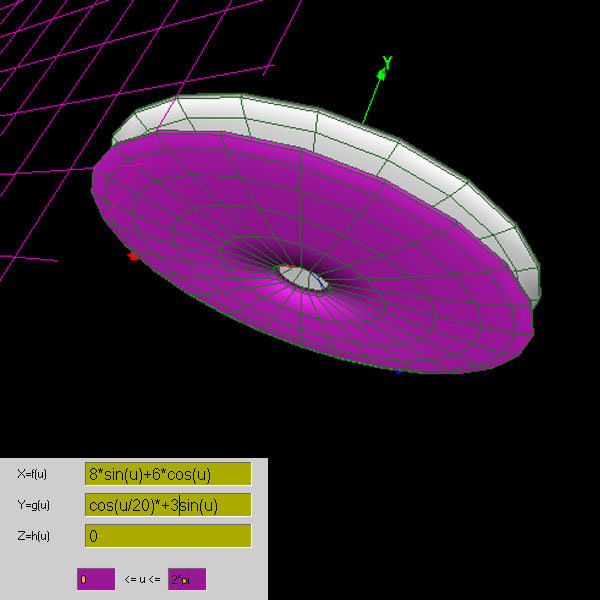
X=f(u) 5*sin(u)-6*atan(u)
Y=g(u) 1.5*sin(u)*10*cos(u)
Z=h(u) 3*cos(u)
10<=u<=5*pi
axe Y
Re: MAT 04 - Rotacione i translatorne površi
k3dsurf
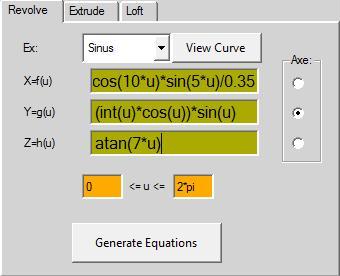
1.x=cos(10*u)*sin(5*u)
y=int(u)+cos(u)
z=atan(5*u)
pi<=u<=3*pi rotacija oko y ose
1.x=cos(10*u)*sin(5*u)
y=int(u)+cos(u)
z=atan(5*u)
pi<=u<=3*pi rotacija oko y ose
Re: MAT 04 - Rotacione i translatorne površi
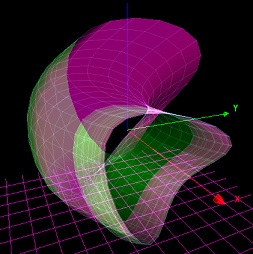
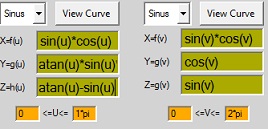
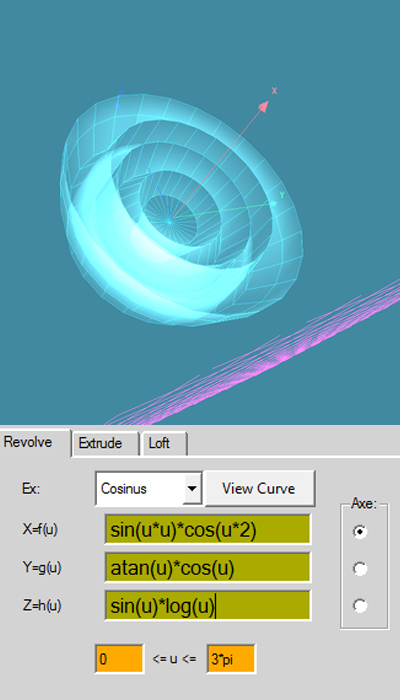
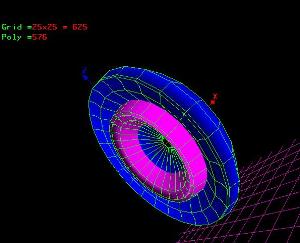
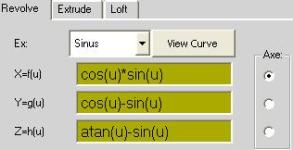
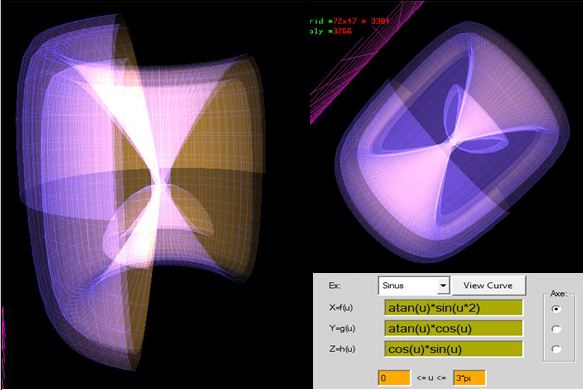
x=sin(u)*cos(u)
y=atan(u)*sin(u)*cos(u)
z=atan(u)-sin(u)*sin(u)
0<=u<=3*pi
0<=v<=2*pi
y=atan(u)*sin(u)*cos(u)
z=atan(u)-sin(u)*sin(u)
0<=u<=3*pi
0<=v<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
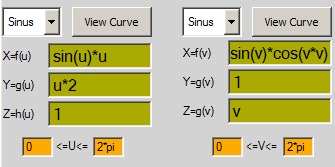
K3DSurf
sinus
X-osa
X=cos(u)
Y=sin(u)
Z=1
0<= u <= 2*pi
sinus
X-osa
X=cos(u)
Y=sin(u)
Z=1
0<= u <= 2*pi

Re: MAT 04 - Rotacione i translatorne površi
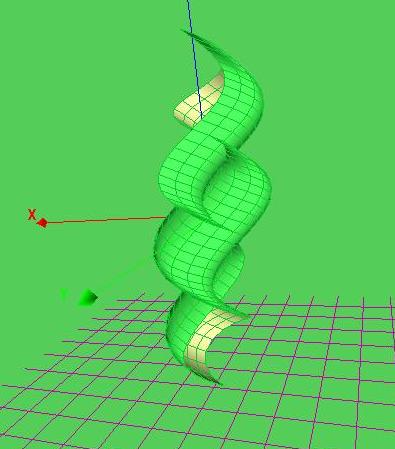
K3D Surf
Parametri:
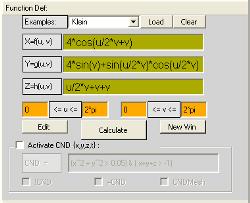
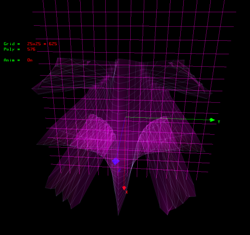
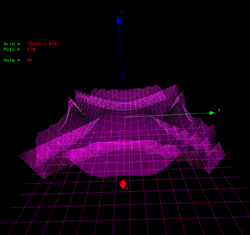
X=f(u)=u*cos(u/2)
Y=g(u)=cos(u/2)*sin(2*u)*u
Z=h(u)=u*sin(u)
Granice:
-1<=u<=2*pi
Rotacija oko Z ose

Parametri:
X=f(u)=u*cos(u/2)
Y=g(u)=cos(u/2)*sin(2*u)*u
Z=h(u)=u*sin(u)
Granice:
-1<=u<=2*pi
Rotacija oko Z ose
Re: MAT 04 - Rotacione i translatorne površi
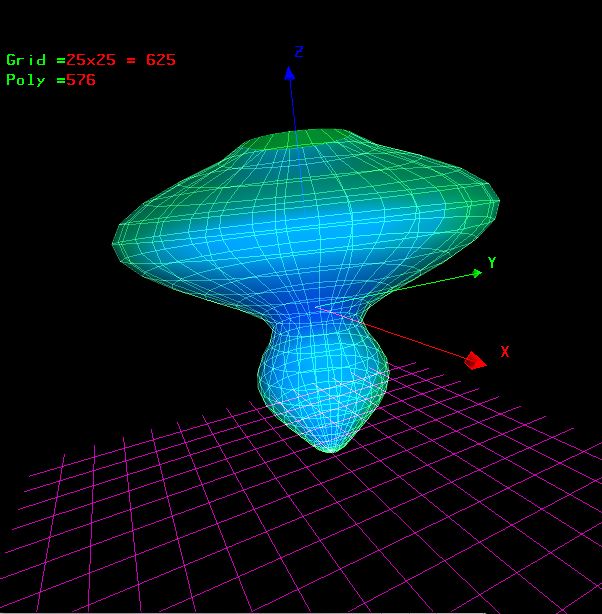
K3DSurf
Parametri
X=atan(u^2)
Y=u
Z=log(u^2)
rotira oko y-ose
granice 0<=u<=2*pi
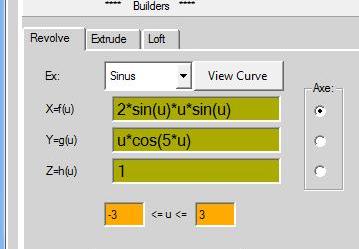
Re: MAT 04 - Rotacione i translatorne površi
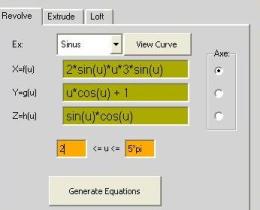
Rotaciona:
xf(u)=2*sin(u)*u*3*sin(u)
yg(u)=u*cos(u) + 1
zh(u)=sin(u)*cos(u)
u: 4 - 12*pi


Re: MAT 04 - Rotacione i translatorne površi
k3dsurf
1.x=sin(u)*atan(u)
y=log10(u*1/4)
z=log10(u*1/2)-cos(u*2)
pi*1/3<=u<=2*pi rotira oko x ose
1.x=sin(u)*atan(u)
y=log10(u*1/4)
z=log10(u*1/2)-cos(u*2)
pi*1/3<=u<=2*pi rotira oko x ose
Re: MAT 04 - Rotacione i translatorne površi
X=f(u) 5*sin(u)-6*atan(u)
Y=g(u) 1.5*sin(u)*10*cos(u)
Z=h(u) 3*cos(u)
10<=u<=5*pi
axe Y2*pi<=v<=10*pi7
Y=g(u) 1.5*sin(u)*10*cos(u)
Z=h(u) 3*cos(u)
10<=u<=5*pi
axe Y2*pi<=v<=10*pi7
Re: MAT 04 - Rotacione i translatorne površi
f(x)=u
f( y)=cos(u)*cos(v)
f(z)=cos(u)*sin(v)
0<u<2*pi 0<v<2*pi
f( y)=cos(u)*cos(v)
f(z)=cos(u)*sin(v)
0<u<2*pi 0<v<2*pi
Re: MAT 04 - Rotacione i translatorne površi
x=sin(u)*sin(2*u)
y=sin(u)-sin(2*u)
z=sin(u)+u
rotira oko z-ose
u je od 0 do 2pi
y=sin(u)-sin(2*u)
z=sin(u)+u
rotira oko z-ose
u je od 0 do 2pi
Re: MAT 04 - Rotacione i translatorne površi
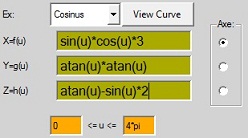
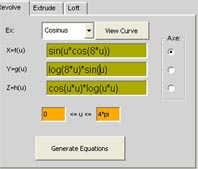
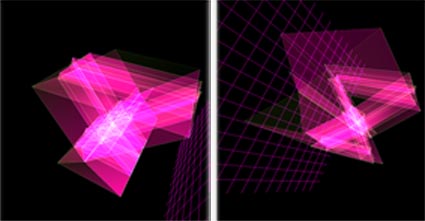
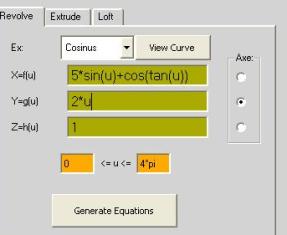
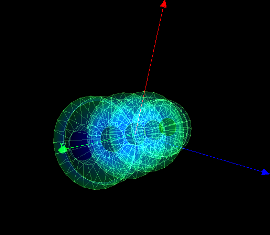
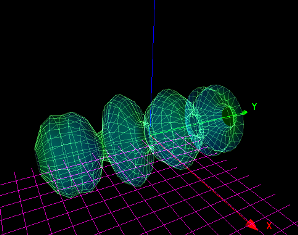
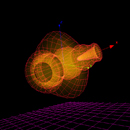
ex:cosinus
X=f(u) 7*cos(u)*sin(u*3)
Y=g(u) (log(u)*log(u*2))
Z=h(u) log(u)
axe: X
0-u-2*pi
X=f(u) 7*cos(u)*sin(u*3)
Y=g(u) (log(u)*log(u*2))
Z=h(u) log(u)
axe: X
0-u-2*pi




Odgovor: Re: MAT 04 - Rotacione i translatorne površi
X sin(2*u)*tan(u)
Y int(u)
Z u
u je od 0 do 2pi
rotira oko y ose
Y int(u)
Z u
u je od 0 do 2pi
rotira oko y ose
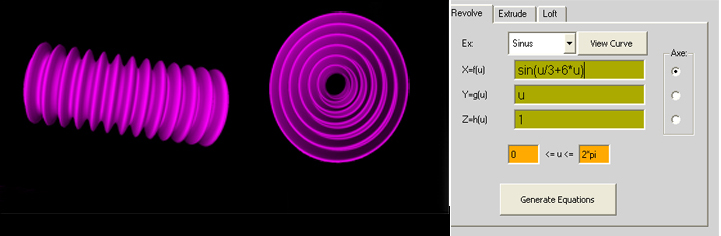
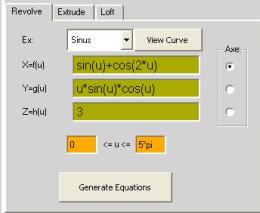
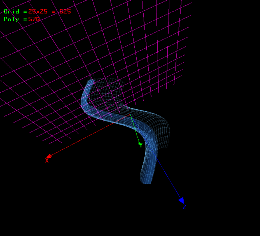
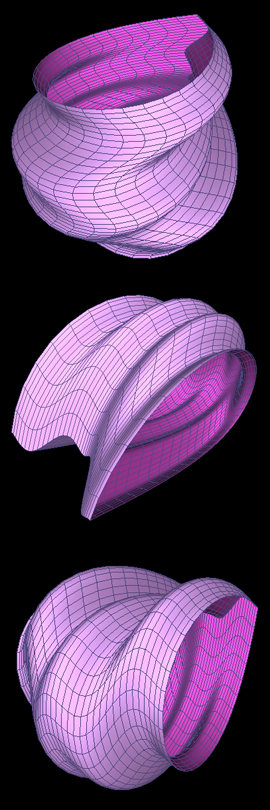
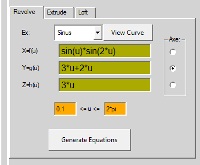
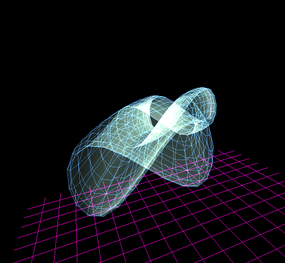
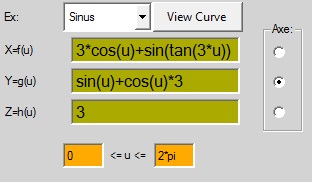
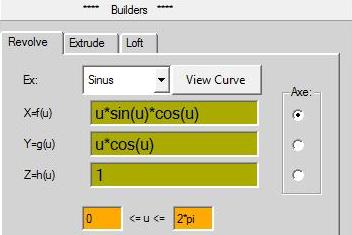
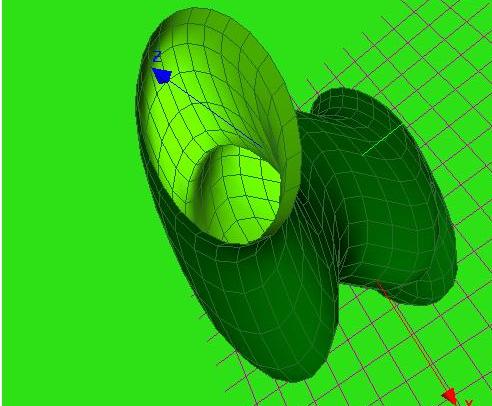
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
rotation
ex: sinus
x=sin(u)+cos(2*u)
y=u*sin(u)
z=1
0=u=2*pi
ex: sinus
x=sin(u)+cos(2*u)
y=u*sin(u)
z=1
0=u=2*pi
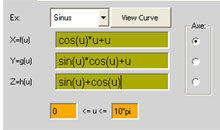
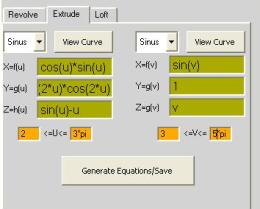
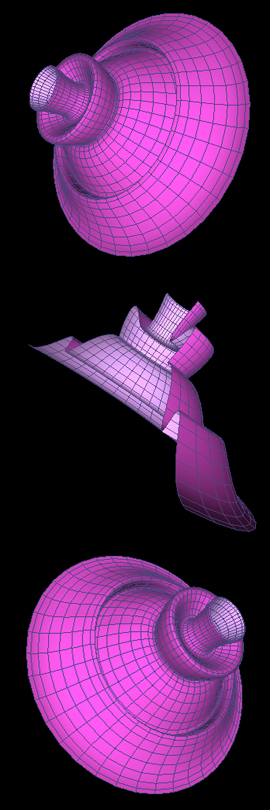
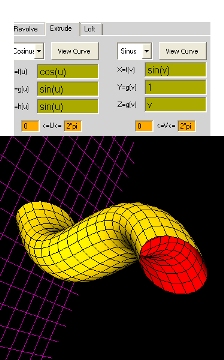
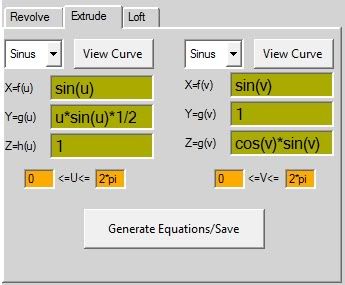
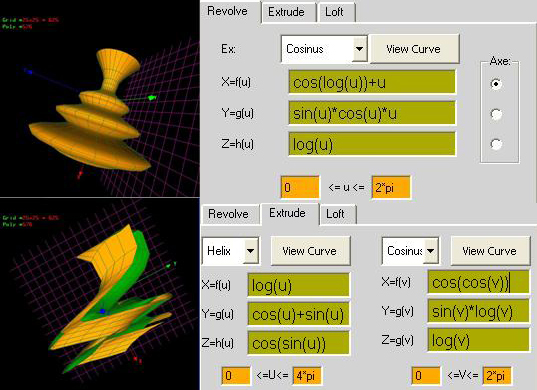
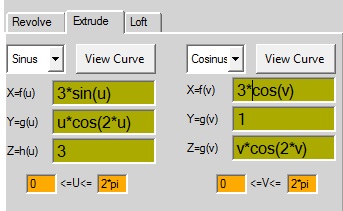
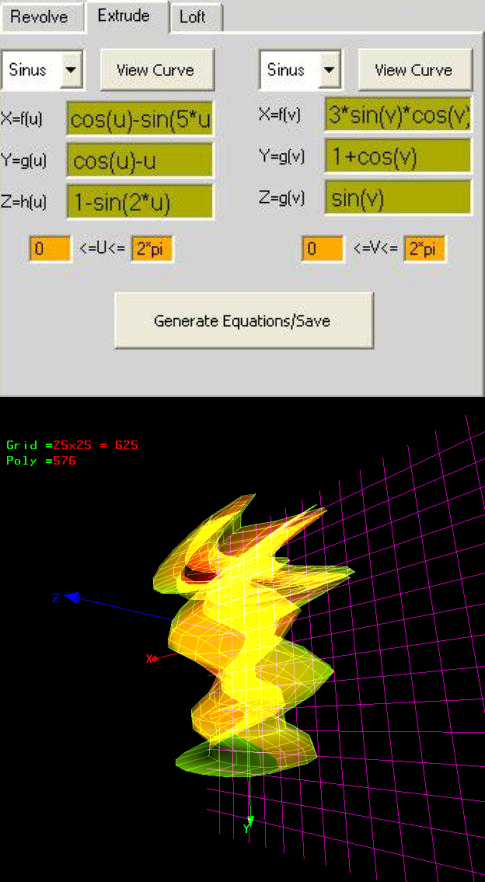
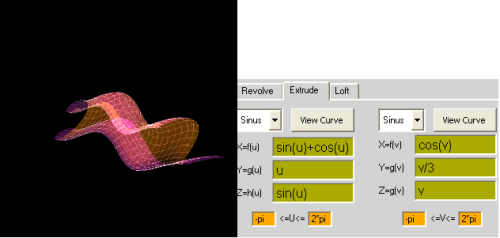
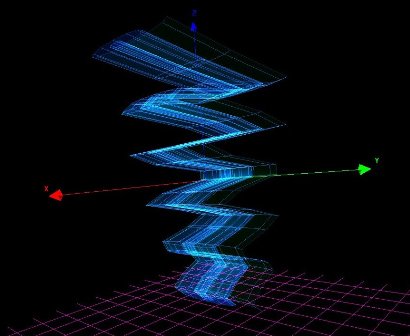
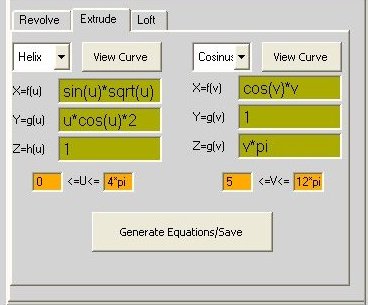
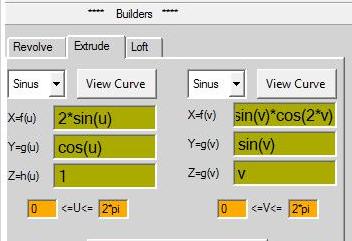
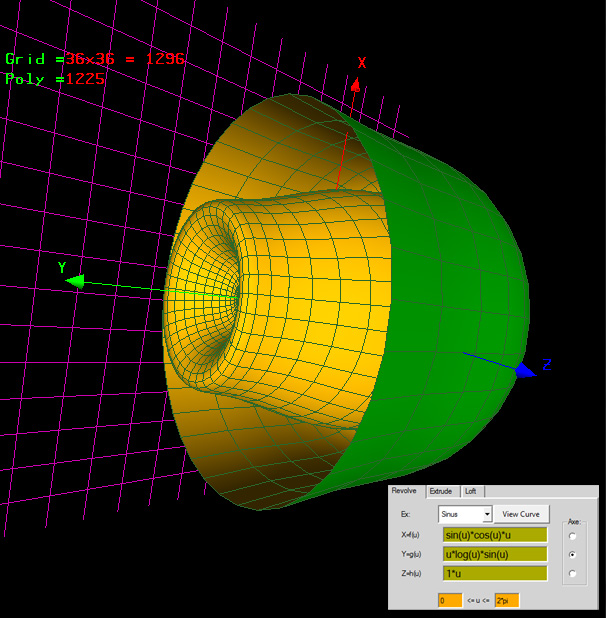
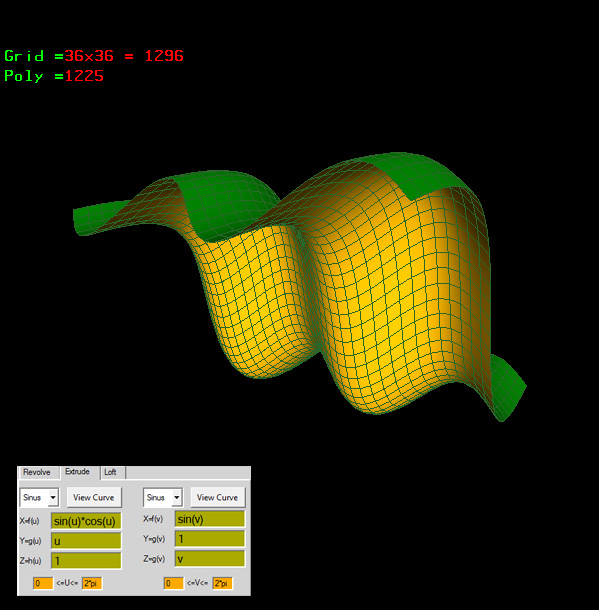
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
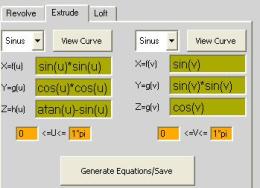
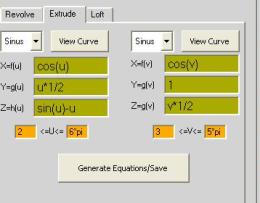
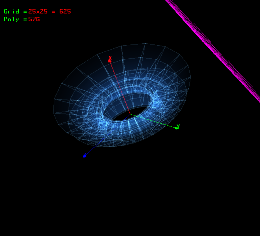
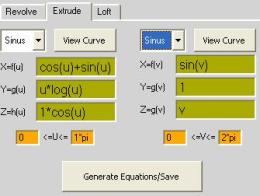
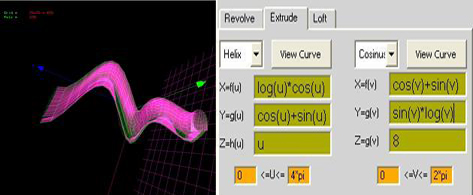
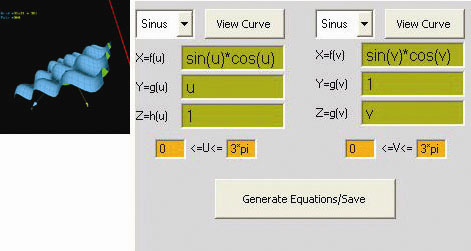
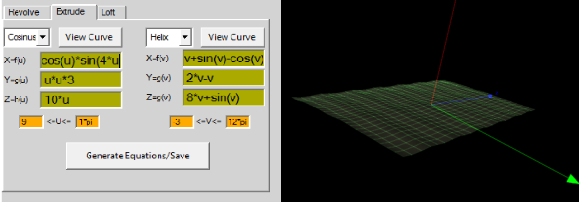
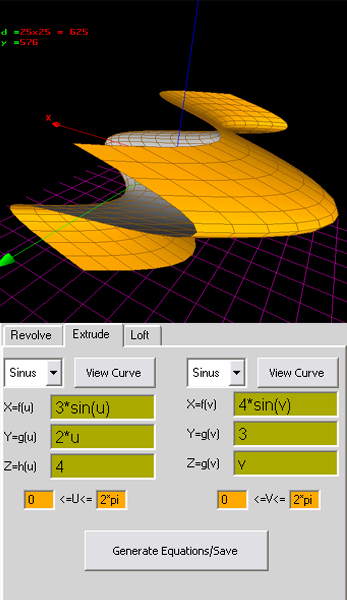
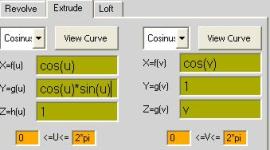
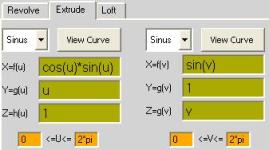
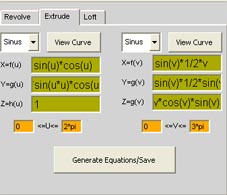
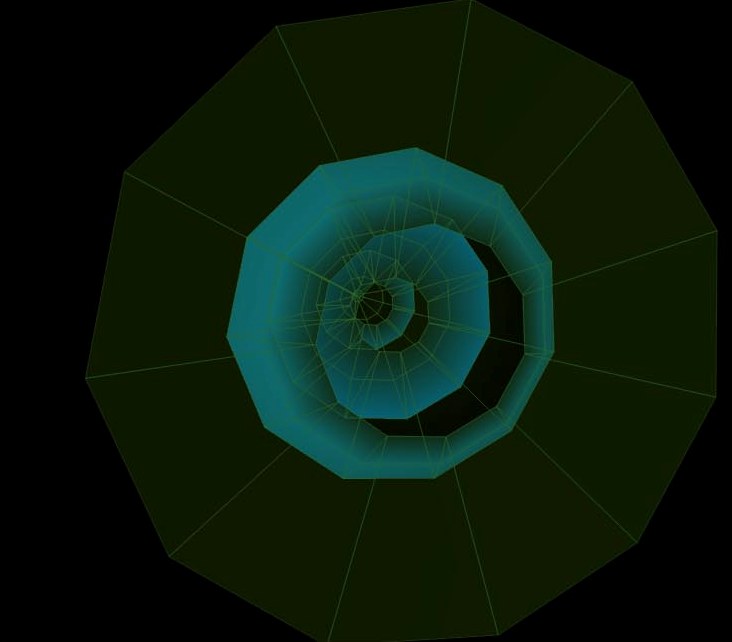
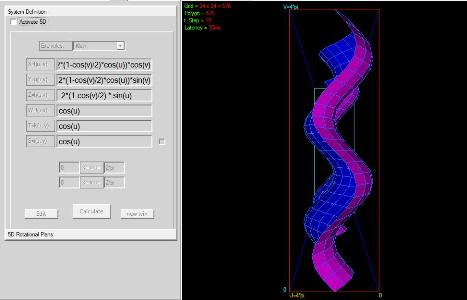
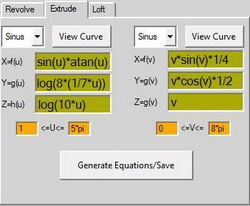
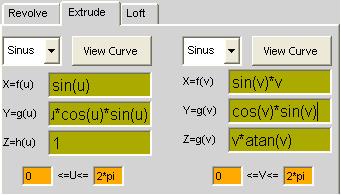
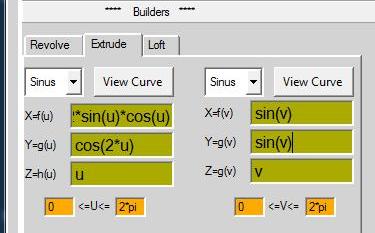
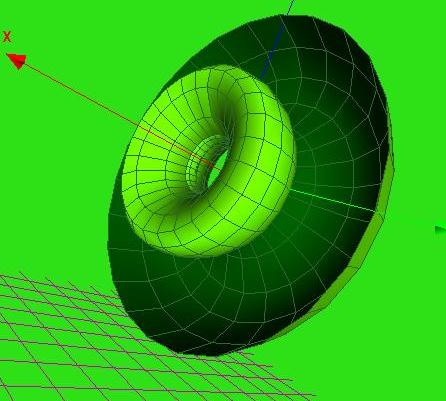
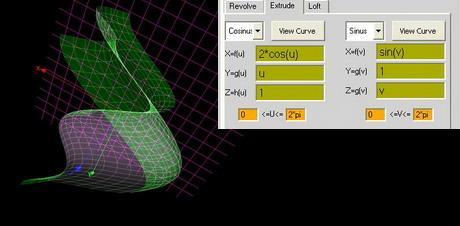
extrude:
cosinus
x=cos(u)+sin(u)
y=u*log(u)
z=1*cos(u)
0=u=2pi
sinus:
x=sin(v)+cos(2*v)
y=1*v
z=v*log(v)
0=v=2pi
cosinus
x=cos(u)+sin(u)
y=u*log(u)
z=1*cos(u)
0=u=2pi
sinus:
x=sin(v)+cos(2*v)
y=1*v
z=v*log(v)
0=v=2pi
Re: MAT 04 - Rotacione i translatorne površi
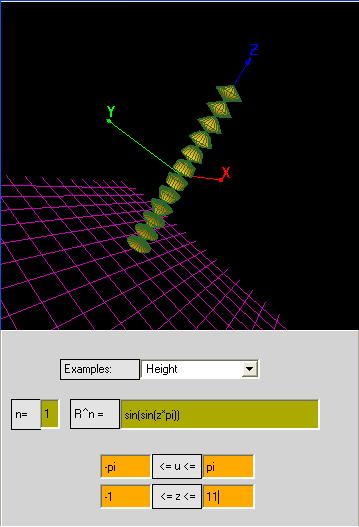
K3D SURF
x=u*log(u)*4^cos(u)/2*sin(u)
y=u*cos(u)*atan(u^3)
z=log(u)
-7<=u<=11*pi
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
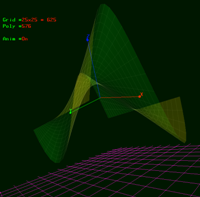
x=v
y=sin(pi*((u)^2+(v)^2))/2
z=u
-1<=u<=1 -1<=v<=1
y=sin(pi*((u)^2+(v)^2))/2
z=u
-1<=u<=1 -1<=v<=1
Re: MAT 04 - Rotacione i translatorne površi
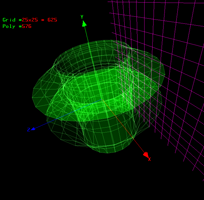
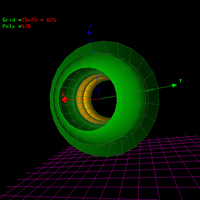
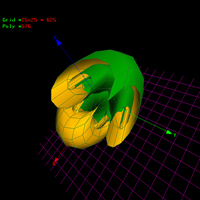
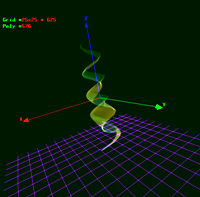
3D Grapher
a=u
R=v
Z=u
Min U:-10; Max U:10; Steps:20
Min V:-10; Max V:10; Steps:20
Rotira oko Z ose
a=u
R=v
Z=u
Min U:-10; Max U:10; Steps:20
Min V:-10; Max V:10; Steps:20
Rotira oko Z ose
Re: MAT 04 - Rotacione i translatorne površi
Xf(u)=cos(v)+u*cos(v/2)*cos(v)
Yg(u)=u*sin(v/2)
Zh(u)=sin(v)+u*cos(v/2)*sin(v)
0*pi<v<2*pi
rotacija je oko z-ose
Yg(u)=u*sin(v/2)
Zh(u)=sin(v)+u*cos(v/2)*sin(v)
0*pi<v<2*pi
rotacija je oko z-ose
Re: MAT 04 - Rotacione i translatorne površi
X=cos(v)+y*cos(v/2)+sin(y)
Y=y*sin(v/2)*2
Z=y*cos(v/2)+v
u od -0.4 do 0.4
v od 0 do 2p
Y=y*sin(v/2)*2
Z=y*cos(v/2)+v
u od -0.4 do 0.4
v od 0 do 2p
Re: MAT 04 - Rotacione i translatorne površi
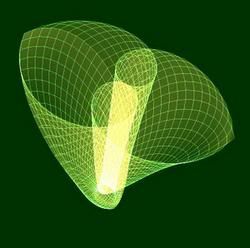
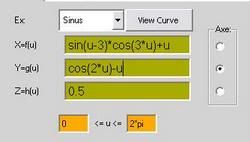
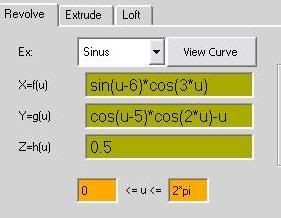
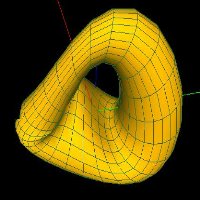
x=sin(u-3)*cos(3*u)+u
y=cos(u-3)*cos(2*u)-u
z=0.5
granice o - 2pi
y=cos(u-3)*cos(2*u)-u
z=0.5
granice o - 2pi





Re: MAT 04 - Rotacione i translatorne površi
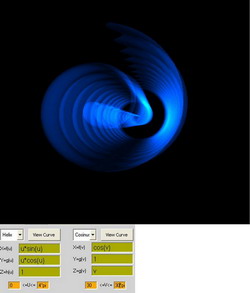
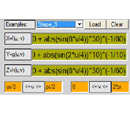
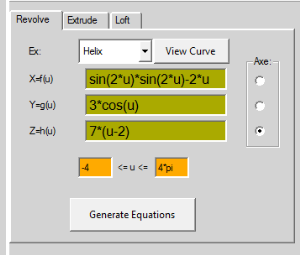
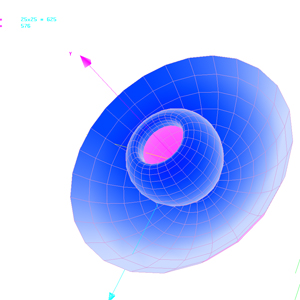
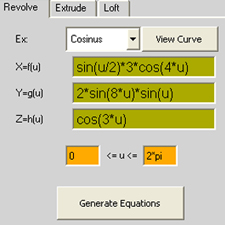
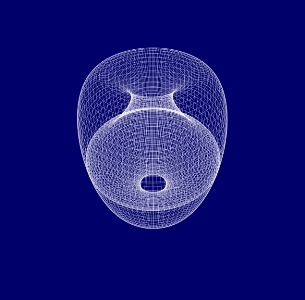
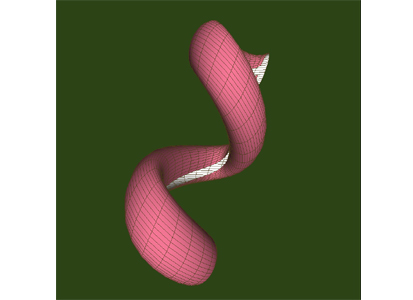
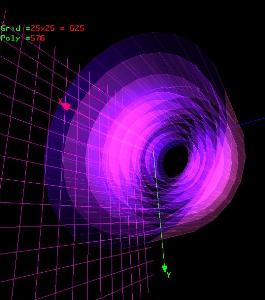
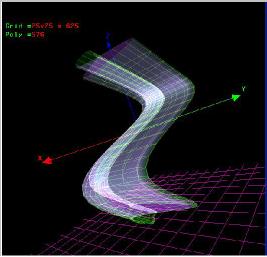
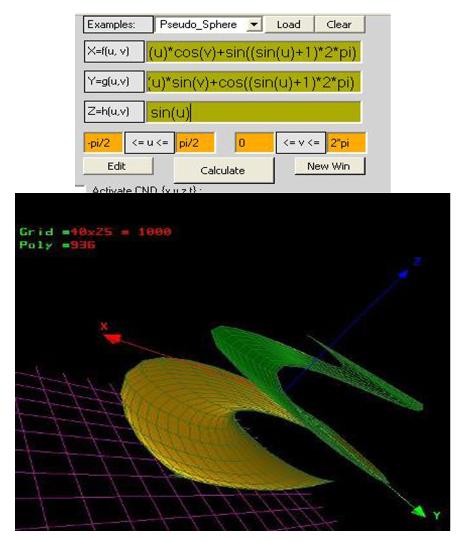
x=5*sin(u)+cos(tan(2*u))
y=2*sin(7*u)*sin(u)
z=log10(u)+cos(u)
y=2*sin(7*u)*sin(u)
z=log10(u)+cos(u)
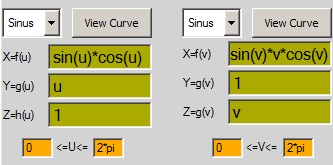
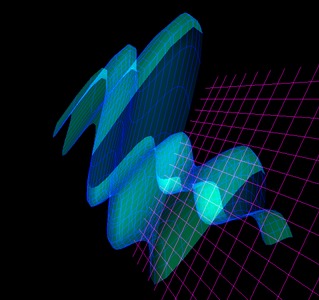
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
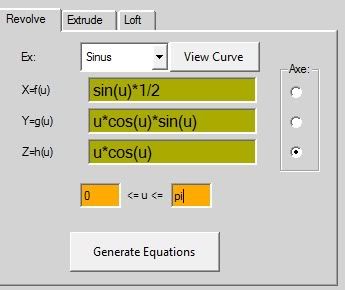
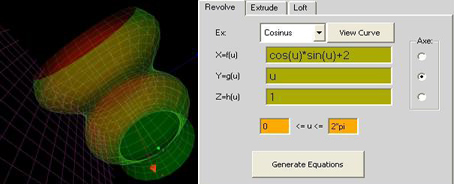
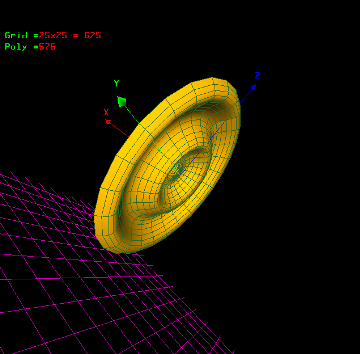
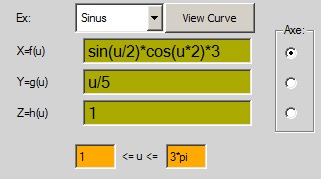
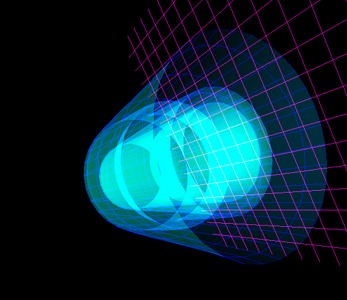
parametri:
ex sinus
x=f(u) sin(u)*cos(u)*3
y=g(u) u*1
z=h(u) 1
rotacija oko y ose
o<=u<=2*pi
ex sinus
x=f(u) sin(u)*cos(u)*3
y=g(u) u*1
z=h(u) 1
rotacija oko y ose
o<=u<=2*pi

Re: MAT 04 - Rotacione i translatorne površi

x=sin(u*6)+u*1.5
y=sin(u)+1
z=u
0<=u<=2*pi
rotacija oko x ose

Re: MAT 04 - Rotacione i translatorne površi
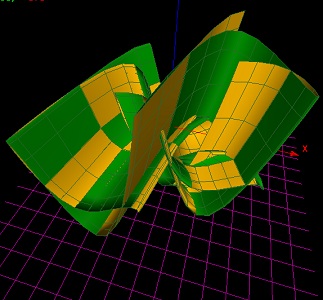
Ex: cosinus
X=f(u) 2*cos(0.5*u)
Y=g(u) 0.5*u
Z=h(u) 2*cos(u/2)
pi<=u<=12pi rotacija oko Z-ose
Re: MAT 04 - Rotacione i translatorne površi
x=f(u)= u* sin(u)+ 10* cos(u)
Y= g(u)= u* cos(0.5*u)-20
Z= h(u)= atan(u)
Re: MAT 04 - Rotacione i translatorne površi
povrs:
x=f(u,v)=cos(2*u)*cos(2*v)
y=g(u,v)=sin(u)
z=h(u,v)=cos(2*u)*sin(2*v)
dobija se rotacijom krive:
x=f(u,v)=cos(2*u)
y=g(u,v)=sin(u)
z=h(u,v)=1
oko y-ose
Re: MAT 04 - Rotacione i translatorne površi
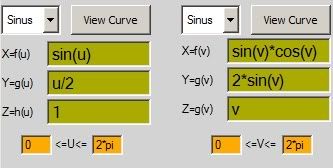
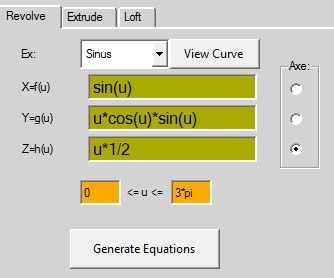
K3DSurf
x=f(u)= sin(u)*cos(u)
y=g(u)= u/2
z=h(u)= 0.5
granice: 0 <= u <= 2*pi
Rotacija oko Y ose.
x=f(u)= sin(u)*cos(u)
y=g(u)= u/2
z=h(u)= 0.5
granice: 0 <= u <= 2*pi
Rotacija oko Y ose.
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
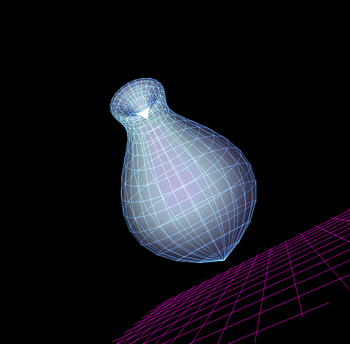
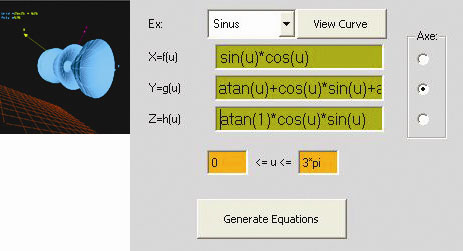
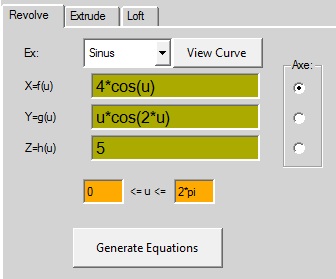
Ex: Sinus
Xf(u)= sin(u)*cos(u)
Yg(u)= atan(u)+cos(u)*sin(u)+atan(1)*cos(u)*sin(u)
Zh(u)= atan(1)*cos(u)*sin(u)
0*pi
Xf(u)= sin(u)*cos(u)
Yg(u)= atan(u)+cos(u)*sin(u)+atan(1)*cos(u)*sin(u)
Zh(u)= atan(1)*cos(u)*sin(u)
0*pi
Re: MAT 04 - Rotacione i translatorne površi
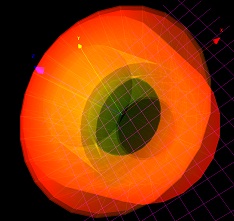
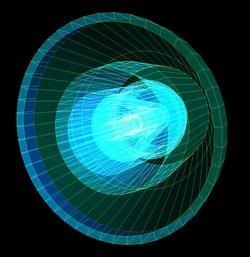
Cylindrical coordinate system
a(u,v,t) = cos(v)
R(u,v,t) = sin(v)*cos(u)
Z(u,v,t) = sin(u)-cos(v)
rotacija oko Z ose
Domen
MinU: -3.1415 MaxU: 3.1415 Steps: 30
MinV: -3.1415 MaxV: 3.1415 Steps: 40
a(u,v,t) = cos(v)
R(u,v,t) = sin(v)*cos(u)
Z(u,v,t) = sin(u)-cos(v)
rotacija oko Z ose
Domen
MinU: -3.1415 MaxU: 3.1415 Steps: 30
MinV: -3.1415 MaxV: 3.1415 Steps: 40
Re: MAT 04 - Rotacione i translatorne površi
zadatak. nisam se bas najbolje snasla.. nadam se da je ok.
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
x=sin(u)
y=u
z=1
1<=u<=2pi
Translacija oko x i y osa:
y=u
z=1
1<=u<=2pi
Translacija oko x i y osa:
Re: MAT 04 - Rotacione i translatorne površi
x=atan(u)
y=cos(2*u)*cos(8*u)
z=atan(u)
0<=u<=2pi
rotacija oko x ose
y=cos(2*u)*cos(8*u)
z=atan(u)
0<=u<=2pi
rotacija oko x ose
Re: MAT 04 - Rotacione i translatorne površi
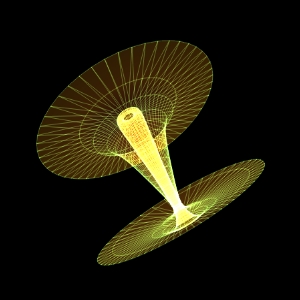
X=sin(u)*cos(u)
Y=cos(u)*atan(u)
Z=atan(u)-cos(u)
rotacija oko Z ose
Y=cos(u)*atan(u)
Z=atan(u)-cos(u)
rotacija oko Z ose
Re: MAT 04 - Rotacione i translatorne površi

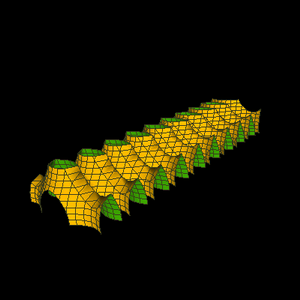
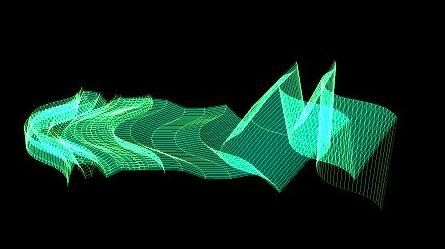
extrude:
x: sin(log(u))*u*cos(u)
y: log(u)*u*cos(u)-3*u
z:u
0<=u<=2*pi

revolve:
x: sin(log(u))*u*cos(u)
y: log(u)*u*cos(u)-3*u
z:u
0<=u<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
k3d surf
x=sin(u)-cos(u)*tan(u)
y=u
z=cos(u)
2pi<=u<=4pi
rotacija oko z ose
x=sin(u)-cos(u)*tan(u)
y=u
z=cos(u)
2pi<=u<=4pi
rotacija oko z ose
Re: MAT 04 - Rotacione i translatorne površi
i drugi deo
kriva:x=sin(u)-2*cos(u)
y=u*3-sin(u);z=u;0pi translira po krivoj: x=sin(v)*cos(v);y=v-2;z=v;2pi<=v<=4pi
kriva:x=sin(u)-2*cos(u)
y=u*3-sin(u);z=u;0pi translira po krivoj: x=sin(v)*cos(v);y=v-2;z=v;2pi<=v<=4pi
Re: MAT 04 - Rotacione i translatorne površi
x=1/2*tan(sin(u)+cos(u))
y=tan(atan(u)*sin(u))
z=2
0<=u<=2*pi
y=tan(atan(u)*sin(u))
z=2
0<=u<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
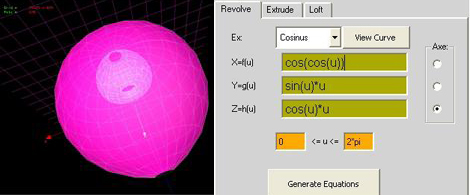
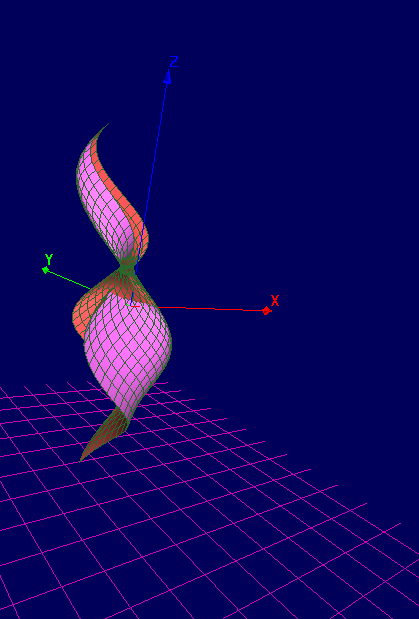
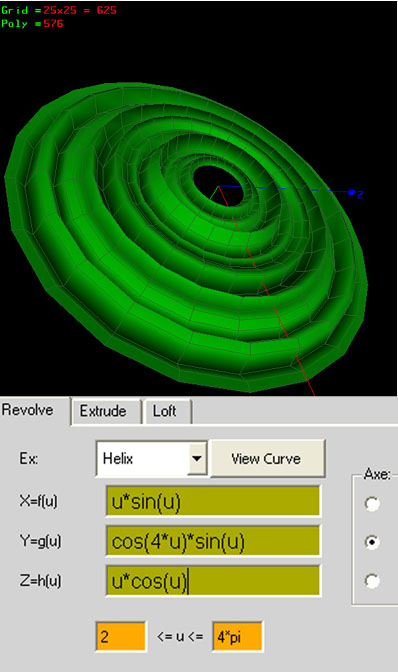
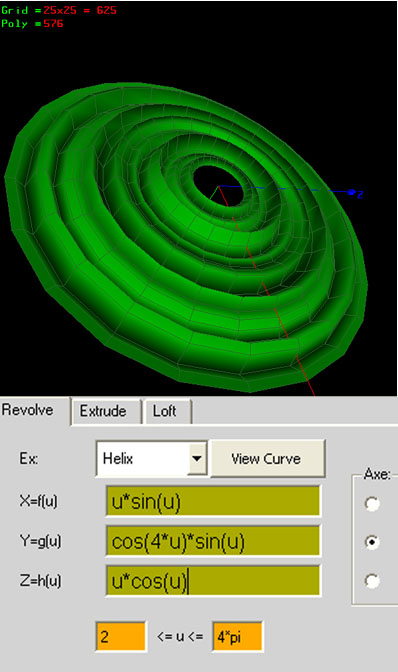
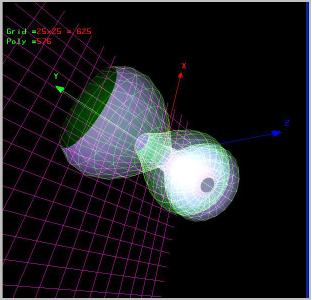
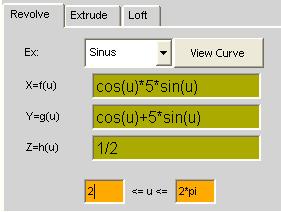
Ex: Cosinus
X=f(u) cos(u)*5*sin(u)
Y=g(u) u*cos(4*u)
Z=h(u) cos(u)-sin(u)
0 <= u <= 2*pi
rotira oko Y-ose
X=f(u) cos(u)*5*sin(u)
Y=g(u) u*cos(4*u)
Z=h(u) cos(u)-sin(u)
0 <= u <= 2*pi
rotira oko Y-ose

Re: MAT 04 - Rotacione i translatorne površi
1.x=sin(u)*atan(u*1/2)
y=log10(u*1/6)
z=log10(u*1)-cos(u*10)
0 <=u<=2*pi
rotacija oko y ose
y=log10(u*1/6)
z=log10(u*1)-cos(u*10)
0 <=u<=2*pi
rotacija oko y ose
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
X=f(u)=sin(u)-cos(u)
Y=g(u)=atan(u)
Z=h(u)=u
-2*pi<=u<=2*pi
rotacija oko Z ose
Y=g(u)=atan(u)
Z=h(u)=u
-2*pi<=u<=2*pi
rotacija oko Z ose

Odgovor: Re: MAT 04 - Rotacione i translatorne površi
K3DSurf
Ex:sinus
rotira oko z ose
x=15*sin(3*u)*u
y=2*cos(u^4)+5*u
z=32*sin(u)*sin(u)+26*sin(u)
u se nalazi izmedju nula i 2pi. (iz nepoznatog razloga,ovaj parametar se izbrise svaki put kada stavim znak za vece ili jednako)
Ex:sinus
rotira oko z ose
x=15*sin(3*u)*u
y=2*cos(u^4)+5*u
z=32*sin(u)*sin(u)+26*sin(u)
u se nalazi izmedju nula i 2pi. (iz nepoznatog razloga,ovaj parametar se izbrise svaki put kada stavim znak za vece ili jednako)
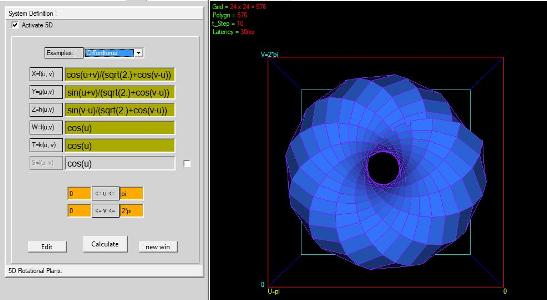
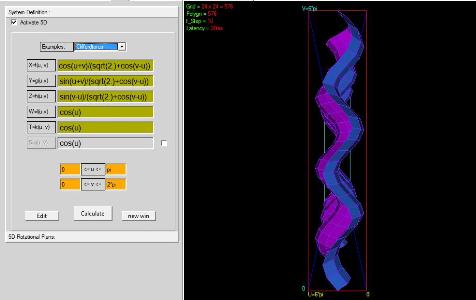
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
Kriva:
x=f(u,v) . cos(u+v)
y=g(u,v) . sin(v)*cos(v)
z=h(u,v) . u+v
x=f(u,v) . cos(u+v)
y=g(u,v) . sin(v)*cos(v)
z=h(u,v) . u+v
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
x=f(u,v)= cos(2*u)*sin(u)
y=g(u,v)= cos(u)
z=h(u,v)= sin(4*u)
rotacija oko x ose
y=g(u,v)= cos(u)
z=h(u,v)= sin(4*u)
rotacija oko x ose
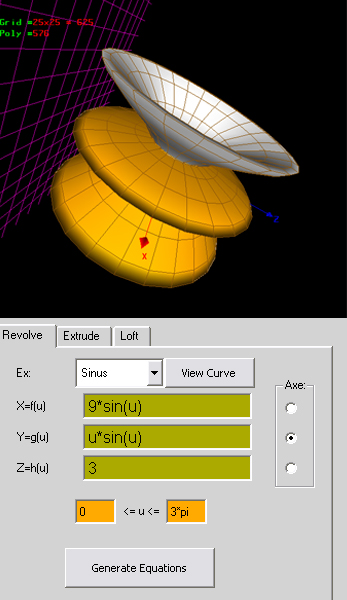
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
Rotaciona površ
x=f(u)=2*sin(u)+2*cos(u)
y=g(u)=u/2
z=h(u)=log(u*u)
u od pi/2 do 2*pi
Rotacija po z-osi
x=f(u)=2*sin(u)+2*cos(u)
y=g(u)=u/2
z=h(u)=log(u*u)
u od pi/2 do 2*pi
Rotacija po z-osi
Odgovor: Re: MAT 04 - Rotacione i translatorne površi
Ex:Sinus
X=u*sin(2*u)
Y=2*u
Z=sin(2*u)
0<=u<=2*pi
oko x ose
X=u*sin(2*u)
Y=2*u
Z=sin(2*u)
0<=u<=2*pi
oko x ose

Odgovor: Re: MAT 04 - Rotacione i translatorne površi
x=f(u)cos(u)*sin(u)*cos(u)+4*sin(u)+6*sin(u)*cos(u)-3*cos(u)
y=g(u) sin(u)*cos(u)*cos(u)*sin(u)
z=h(u) u+1
0-2*pi
y=g(u) sin(u)*cos(u)*cos(u)*sin(u)
z=h(u) u+1
0-2*pi





Re: MAT 04 - Rotacione i translatorne površi
K3DSurf
Parametri
X=f(u) - u*cos(u)
Y=g(u) - u*sin(u)
Z=h(u) - 1
0*pi - 4*pi
Parametri
X=f(u) - u*cos(u)
Y=g(u) - u*sin(u)
Z=h(u) - 1
0*pi - 4*pi
Re: MAT 04 - Rotacione i translatorne površi
K3DSurf
Parametri:
Ex: Cosinus
Xf(u)= sin(u)*cos(u)
Yg(u)= atan(u)*sin(u)*cos(u)
Zh(u)= atan(u)-sin(u)
0*pi<u<3*pi
rotacija oko z-ose
Parametri:
Ex: Cosinus
Xf(u)= sin(u)*cos(u)
Yg(u)= atan(u)*sin(u)*cos(u)
Zh(u)= atan(u)-sin(u)
0*pi<u<3*pi
rotacija oko z-ose
Re: MAT 04 - Rotacione i translatorne površi
KD3Surf
X=v*2*cos(u)
Y=v*sin(u)
Z=v^2
0<=u<=2*pi
0<=v<=2
rotira oko x-ose
bilo mi je zanimljivo da rad prikazem iz vise uglova


Re: MAT 04 - Rotacione i translatorne površi
rotacija
x=sin(u*5)*cos(u-8)*sin(u-5)+u
cos(u*8)*sin(u-5)+u
0.5
0<=u<=2*pi
x=sin(u*5)*cos(u-8)*sin(u-5)+u
cos(u*8)*sin(u-5)+u
0.5
0<=u<=2*pi



Re: MAT 04 - Rotacione i translatorne površi
k3dsurf
ex:Cosinus
Xf(u)=sin(u)*cos(u)*2
Yg(u)=atan(u)*atan(u)
Zh(u)=0
0<=u<=6*pi
rotira oko ose y
ex:Cosinus
Xf(u)=sin(u)*cos(u)*2
Yg(u)=atan(u)*atan(u)
Zh(u)=0
0<=u<=6*pi
rotira oko ose y
Re: MAT 04 - Rotacione i translatorne površi
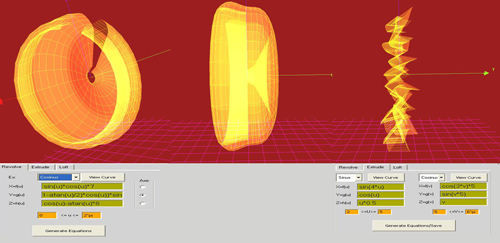
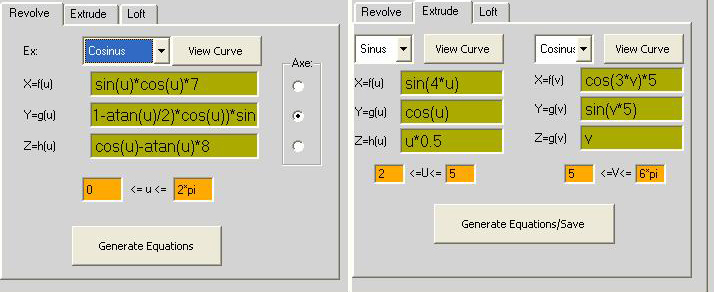
revolve:
x=sin(u)*cos(u)*7
y=(4+2*(1-atan(u)/2)*cos(u))*sin(u)
z=cos(u)-atan(u)*8
0 <= u <=2*pi
extrude:
x=f(u) sin(4*u)
y=g(u)cos(u)
z=h(u)u*0.5
2<=u<=5
x=f(v)cos(3*v)*5
y=g(v)sin(v*5)
z=h(v)v
5<=v<=6*pi
rotira oko z-ose
x=sin(u)*cos(u)*7
y=(4+2*(1-atan(u)/2)*cos(u))*sin(u)
z=cos(u)-atan(u)*8
0 <= u <=2*pi
extrude:
x=f(u) sin(4*u)
y=g(u)cos(u)
z=h(u)u*0.5
2<=u<=5
x=f(v)cos(3*v)*5
y=g(v)sin(v*5)
z=h(v)v
5<=v<=6*pi
rotira oko z-ose
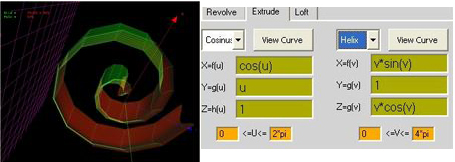
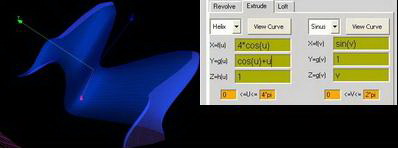
Re: MAT 04 - Rotacione i translatorne površi
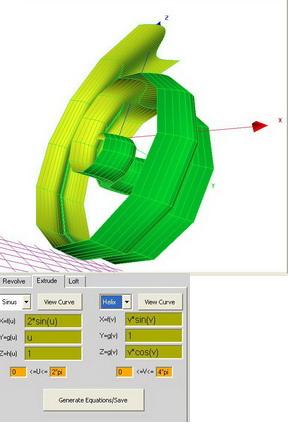
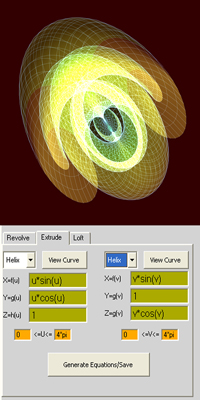
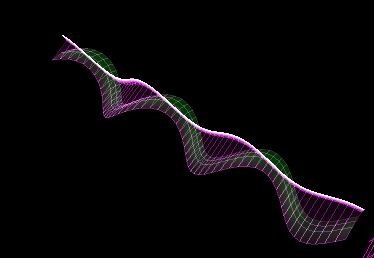
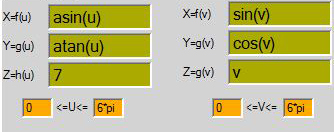
translatorna povrs
helix
x=u*sin(u)*cos(u) x=sin(v)
y=u*cos(u) y=1
z=1/8*u z=4*v
helix
x=u*sin(u)*cos(u) x=sin(v)
y=u*cos(u) y=1
z=1/8*u z=4*v
Re: MAT 04 - Rotacione i translatorne površi
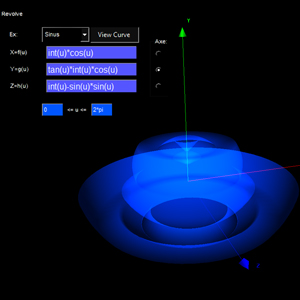
int(u)*cos(u)
tan(u)*int(u)*cos(u)
int(u)-sin(u)*sin(u)
0 < u < 2pi
tan(u)*int(u)*cos(u)
int(u)-sin(u)*sin(u)
0 < u < 2pi
Re: MAT 04 - Rotacione i translatorne površi
K3dsurf
x=sin(u*2)+cos(u)
y=u*2-sin(u)+atan(u)
z=sin(u)-atan(u)*cos(u*6)
od 0 do 2pi
rotacija oko z ose








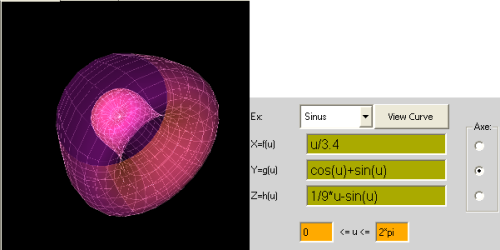
Odgovor: MAT 04 - Rotacione i translatorne površi
primer:
Re: MAT 04 - Rotacione i translatorne površi
k3dsurf
x=u/2
y=cos(u)+cos(u)+sin(u)+sin(u)
z=1/9*u-sin(u)+cos(u)+cos(u)+cos(u)
rotacija oko y ose
granice 0<=u<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
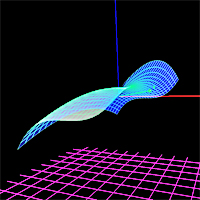
primer:
X:u*cos(v)
Y:exp(-u*u)*(sin(2*pi*u) - u*cos(3*v))
Z:u*sin(v)
0
X:u*cos(v)
Y:exp(-u*u)*(sin(2*pi*u) - u*cos(3*v))
Z:u*sin(v)
0
Re: MAT 04 - Rotacione i translatorne površi
K3DSurf
Revolve
X=sin(U)
Y=U
Z=1
0<=U<=2*Pi
X Osa
Parametric curve
X=sin(u)
Y=sqrt((u)^2 + (1)^2)*sin(v)
Z=sqrt((u)^2 + (1)^2)*cos(v)
0<=U<=2*Pi
0<=V<=2*Pi


Re: MAT 04 - Rotacione i translatorne površi
x=5*sin(u)
y=sin(u)-5*(atan(u))
z=cos(u)
0<=u<=2*pi
rotira oko x ose
x=cos(u)
y=sin(u)-5*(atan(u))
z=cos(u)
0<=u<=2*pi
rotira oko x ose
x=cos(u)
Odgovor: MAT 04 - Rotacione i translatorne površi
1.Revolve
(cosinus)
X=cos(u)*sin(u)
Y=atan(u)*sin(u)*cos(u)
Z=atan(u)-sin(u)*sin(u)
0<=u<=1*pi
-Obrce oko y-ose.
2.Extrude
(sinus)
X=u*sin(u)
Y=u*cos(u)
Z=u
0<=u<=8*pi
(cosinus)
X=cos(v)*v
Y=v
Z=sin(v)*cos(v)
0<=v<=4*pi
(cosinus)
X=cos(u)*sin(u)
Y=atan(u)*sin(u)*cos(u)
Z=atan(u)-sin(u)*sin(u)
0<=u<=1*pi
-Obrce oko y-ose.
2.Extrude
(sinus)
X=u*sin(u)
Y=u*cos(u)
Z=u
0<=u<=8*pi
(cosinus)
X=cos(v)*v
Y=v
Z=sin(v)*cos(v)
0<=v<=4*pi
Re: MAT 04 - Rotacione i translatorne površi
x=2*(0.5-0.1*cos(v))*cos(u)
y=0.4*(sin(v) + u/1.2 -18)
z=(0.5-0.3*cos(v))*sin(u)
0<=u<=4*pi 0<=v<=2*pi
y=0.4*(sin(v) + u/1.2 -18)
z=(0.5-0.3*cos(v))*sin(u)
0<=u<=4*pi 0<=v<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
x=cos(3*u)*sin(u)
y=sin(3*u)*cos(u)
z=sin(sin(u))
0<=u<=4*pi
y=sin(3*u)*cos(u)
z=sin(sin(u))
0<=u<=4*pi
Re: MAT 04 - Rotacione i translatorne površi
x=sin(u)+cos(3*u)*sin(2*u)
y=cos(u)+sin(3*u)*cos(2*u)
z=sin(u)*cos(u)
0<=u<=3*pi
y=cos(u)+sin(3*u)*cos(2*u)
z=sin(u)*cos(u)
0<=u<=3*pi

Re: MAT 04 - Rotacione i translatorne površi
Rotaciona..

Re: MAT 04 - Rotacione i translatorne površi
x= cos(cos(u))*sin(u)*4*u
y= log(u)*u*sin(4*u)
z= u
osa rotacije x
0<=u<=2*pi

y= log(u)*u*sin(4*u)
z= u
osa rotacije x
0<=u<=2*pi

Re: MAT 04 - Rotacione i translatorne površi
Cartesian Coordinates:
/*
Author: Schwartz ...
*/
7^(cos(x)+sin( y)+cos(z)) + cos(-y) + cos( y)
-7<x<8
-4<y<7
-7<z<7

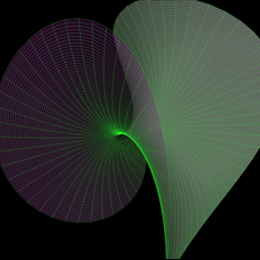
Re: MAT 04 - Rotacione i translatorne površi
k3dsurf
x=(2*(cos(u) + u*sin(u))*sin(v))/(1+ u^2*sin(v)^2)
y=log(tan(1/2 *v)) + (2*cos(v))/(1+ u^2*sin(v)^2)
z=(2*(sin(u) - u*cos(u))*sin(v))/(1+ u^2*sin(v)^2)
0<=u<=2*pi 0.01<=v<=pi-0.01
rotacija oko z-ose
x=(2*(cos(u) + u*sin(u))*sin(v))/(1+ u^2*sin(v)^2)
y=log(tan(1/2 *v)) + (2*cos(v))/(1+ u^2*sin(v)^2)
z=(2*(sin(u) - u*cos(u))*sin(v))/(1+ u^2*sin(v)^2)
0<=u<=2*pi 0.01<=v<=pi-0.01
rotacija oko z-ose

Odgovor: MAT 04 - Rotacione i translatorne površi
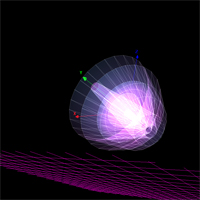
3Dmathexplorer
x=r*cos(a)
y=r*sin(a)
t=0
r=.1+.2*z+.1*sin(10*z+15*t+4*a)
x=r*cos(a)
y=r*sin(a)
t=0
r=.1+.2*z+.1*sin(10*z+15*t+4*a)
Re: MAT 04 - Rotacione i translatorne površi
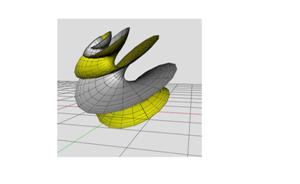
K3Dsurf
x= u*cos(2*v)
y=u*sin(5*cos(v))
z=exp(-u*u)*(sin(2*pi*u) - u*cos(v))
umax= 2.5 vmax=2*pi
ptica:

Rotacija ptice po X osi
x= u*cos(2*v)
y=u*sin(5*cos(v))
z=exp(-u*u)*(sin(2*pi*u) - u*cos(v))
umax= 2.5 vmax=2*pi
ptica:
Rotacija ptice po X osi
Re: MAT 04 - Rotacione i translatorne površi
i translatorna površ... izvinjavam se za par minuta zakasnjenja... :)
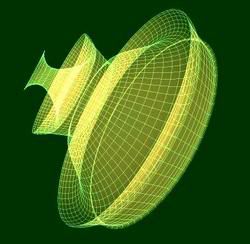
Re: MAT 04 - Rotacione i translatorne površi
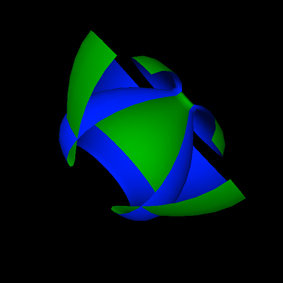
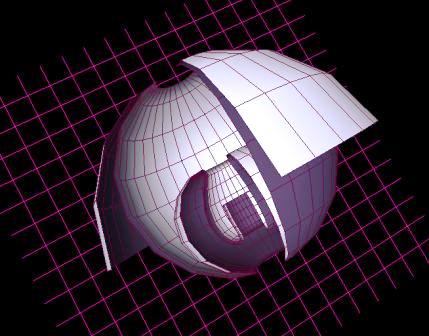
1. korak:
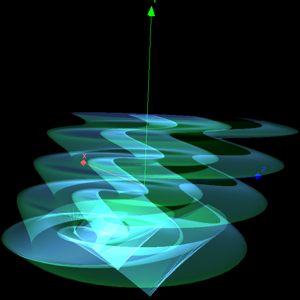
X=f(u,v) : (1-sqrt(u*u + v*v) / sqrt(2*pi*pi))*cos(u)*cos(v)+sqrt(u*u + v*v) / sqrt(2*pi*pi)*sin(u)*sin(v)
Y=g(u,v): (1-sqrt(u*u + v*v) / sqrt(2*pi*pi))*cos(u+4*pi/3)*cos(v+4*pi/3)+sqrt(u*u + v*v) / sqrt(2*pi*pi)*sin(u+4*pi/3)*sin(v+4*pi/3)
Z=h(u,v): qrt(u*u + v*v) / sqrt(2*pi*pi))*cos(u+2*pi/3)*cos(v+2*pi/3)+sqrt(u*u + v*v) / sqrt(2*pi*pi)*sin(u+2*pi/3)*sin(v+2*pi/3)
X=f(u,v) : (1-sqrt(u*u + v*v) / sqrt(2*pi*pi))*cos(u)*cos(v)+sqrt(u*u + v*v) / sqrt(2*pi*pi)*sin(u)*sin(v)
Y=g(u,v): (1-sqrt(u*u + v*v) / sqrt(2*pi*pi))*cos(u+4*pi/3)*cos(v+4*pi/3)+sqrt(u*u + v*v) / sqrt(2*pi*pi)*sin(u+4*pi/3)*sin(v+4*pi/3)
Z=h(u,v): qrt(u*u + v*v) / sqrt(2*pi*pi))*cos(u+2*pi/3)*cos(v+2*pi/3)+sqrt(u*u + v*v) / sqrt(2*pi*pi)*sin(u+2*pi/3)*sin(v+2*pi/3)
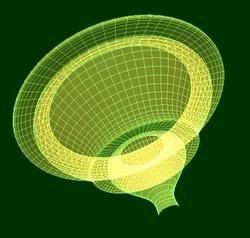
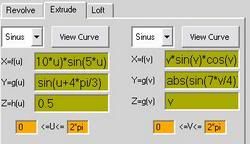
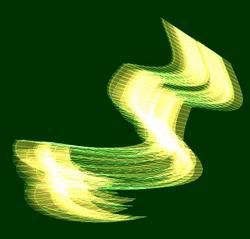
Re: MAT 04 - Rotacione i translatorne površi
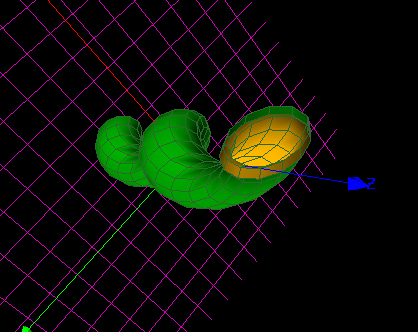
revolve
x=f(u): u*cos(u)
y=g(u): 0.8 * (u*sin(u) * sin((u*cos(u) - -1)*2*pi*1/2) + u * cos((u*cos(u) - -1)*2*pi*1/2))
z=h(u): 0.5
0<=u<=2*pi
1.oko x ose
2.oko y ose
x=f(u): u*cos(u)
y=g(u): 0.8 * (u*sin(u) * sin((u*cos(u) - -1)*2*pi*1/2) + u * cos((u*cos(u) - -1)*2*pi*1/2))
z=h(u): 0.5
0<=u<=2*pi
1.oko x ose
2.oko y ose
Re: MAT 04 - Rotacione i translatorne površi
rotaciona povrs
")
")
Re: MAT 04 - Rotacione i translatorne površi
x: cos(2*sqrt(u))*sin(5*u)
y: sin(3*sqrt(u))-cos(2*u)
z: cos(u)*sin(u)+cos(3*u)
rotacije oko z ose
1.5<=u<=2*pi

y: sin(3*sqrt(u))-cos(2*u)
z: cos(u)*sin(u)+cos(3*u)
rotacije oko z ose
1.5<=u<=2*pi
Re: MAT 04 - Rotacione i translatorne površi
x= 1/cosh(u)-cos(v)
y=u/pi-tanh(v)
z=cos(v)*sin(v)
-2*pi <= u <= 2*pi
-pi <= v <= pi
y=u/pi-tanh(v)
z=cos(v)*sin(v)
-2*pi <= u <= 2*pi
-pi <= v <= pi
 1.
1. 2.
2.
Re: MAT 04 - Rotacione i translatorne površi
x=f(u,v)=cos(u)*sin(v)
y=g(u,v)=(cos(v)+log(tan(v/2))) + 0.4*u
z=h(u,v)=sin(u)*2*sin(v)
y=g(u,v)=(cos(v)+log(tan(v/2))) + 0.4*u
z=h(u,v)=sin(u)*2*sin(v)
Re: MAT 04 - Rotacione i translatorne površi

K3DSurf
X=f(u)=sin(u)+cos(u)+u
Y=g(u)=2*u
Z=h(u)=1
rotacija oko y-ose
vrednosti u:
-donja granica:-2
-gornja granica:2*pi

Re: MAT 04 - Rotacione i translatorne površi
Re: MAT 04 - Rotacione i translatorne površi
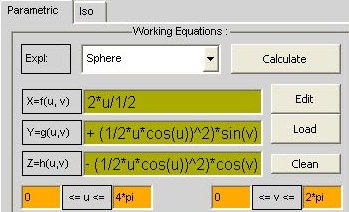
Revolve
X=f(u) : cos(u)*sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*sin(u))^2)*sin(u)
Y=g(u) : u*sin(u)*sin(u)*cos(u)*cos(u)
Z=h(u) : sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*cos(u))^2)*cos(u)*sin(u)
X=f(u) : cos(u)*sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*sin(u))^2)*sin(u)
Y=g(u) : u*sin(u)*sin(u)*cos(u)*cos(u)
Z=h(u) : sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*cos(u))^2)*cos(u)*sin(u)
Re: MAT 04 - Rotacione i translatorne površi
prvi oblik:
x=f(u) u*sin(u)
Y=g(u) cos(u)*atan(u)
Z=h(u) u*atan(u)
granice: 0<=u<=2*pi
rotacija oko Z ose
x=f(u) u*sin(u)
Y=g(u) cos(u)*atan(u)
Z=h(u) u*atan(u)
granice: 0<=u<=2*pi
rotacija oko Z ose
Re: MAT 04 - Rotacione i translatorne površi
K3D SURF
x: sin(u*5)*cos(u-12)*sin(u-3);
y: cos(u*3)*sin(u*5);
z: 0.1;
rotacija se vrsi oko x-ose
0<=u<=2*pi

x: sin(u*5)*cos(u-12)*sin(u-3);
y: cos(u*3)*sin(u*5);
z: 0.1;
rotacija se vrsi oko x-ose
0<=u<=2*pi

Re: MAT 04 - Rotacione i translatorne površi
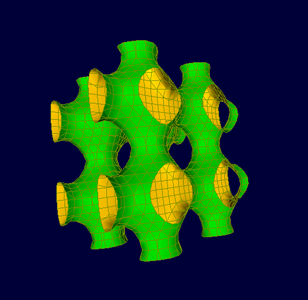
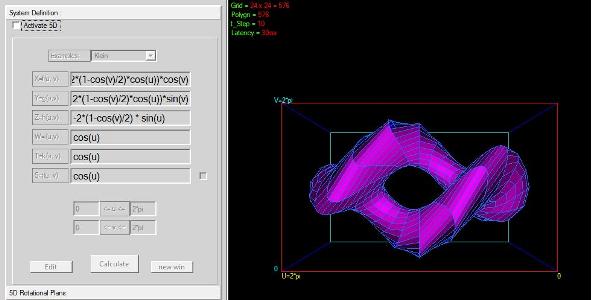
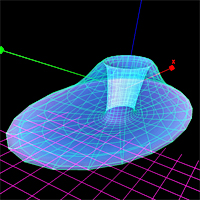
X=f(u,v) + 2*(1-cos(v)/2)*cos(u))*cos(v)
Y=g(u,v) 4+2*(1-cos(v)/2)*cos(u))*sin(v)
Z= h(u,v) -2*(1-cos(v)/2) * sin(u)
0<=u<=2*pi 0<=v<=2*pi
rotira oko y-ose
Y=g(u,v) 4+2*(1-cos(v)/2)*cos(u))*sin(v)
Z= h(u,v) -2*(1-cos(v)/2) * sin(u)
0<=u<=2*pi 0<=v<=2*pi
rotira oko y-ose
Odgovor: MAT 04 - Rotacione i translatorne površi
ex: cosinus
x=cos(u)*(u+1)*sin(u-1)
y=u*cos(u)+1*sin(u)
z=sin(u)+u*sin(u)
0<u<2pi
x=cos(u)*(u+1)*sin(u-1)
y=u*cos(u)+1*sin(u)
z=sin(u)+u*sin(u)
0<u<2pi
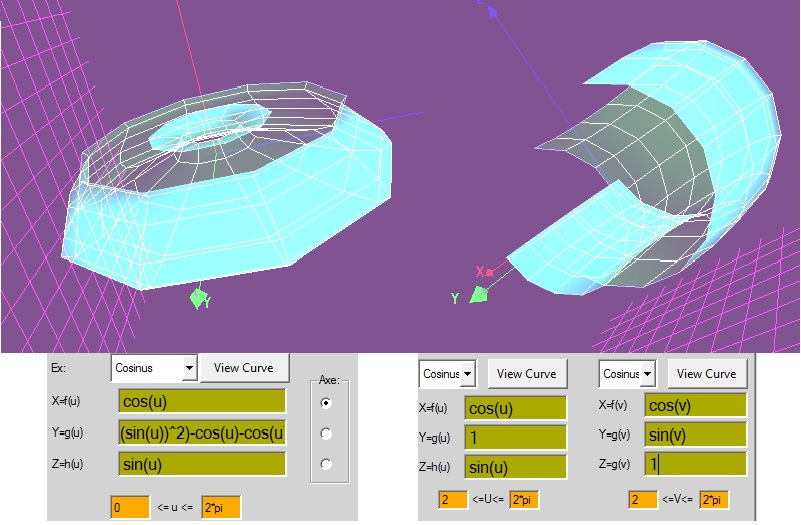
Odgovor: MAT 04 - Rotacione i translatorne površi
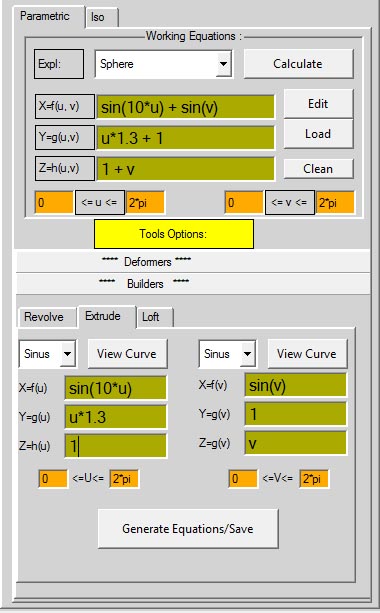
K3DSurf...
X(u)=sin(u)*sin(u);
X(u)=cos(v)*cos(v)*cos(v)
Y(u)=u;
Y(u)=2
Z(u)=1;
Z(u)=v
X(u)=sin(u)*sin(u);
X(u)=cos(v)*cos(v)*cos(v)
Y(u)=u;
Y(u)=2
Z(u)=1;
Z(u)=v
Odgovor: MAT 04 - Rotacione i translatorne površi
f (x) =u/2
f (y =cos(u)*cos(v)
f (z) =cos(u)*sin(v)
0<u<3*pi
0<v<3*pi

f (y =cos(u)*cos(v)
f (z) =cos(u)*sin(v)
0<u<3*pi
0<v<3*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
xf(u)=sin(u)*2*cos(u)
yg(u)=atan(u)*cos(u)
zh(u)=cos(u)-sin(u)
0*pi<u<2*pi
rotacija oko y ose
yg(u)=atan(u)*cos(u)
zh(u)=cos(u)-sin(u)
0*pi<u<2*pi
rotacija oko y ose
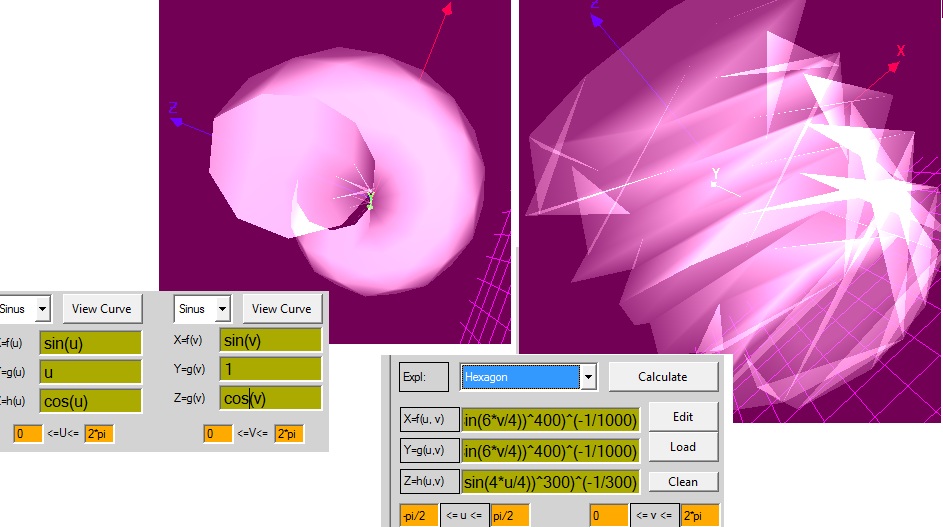
Odgovor: MAT 04 - Rotacione i translatorne površi
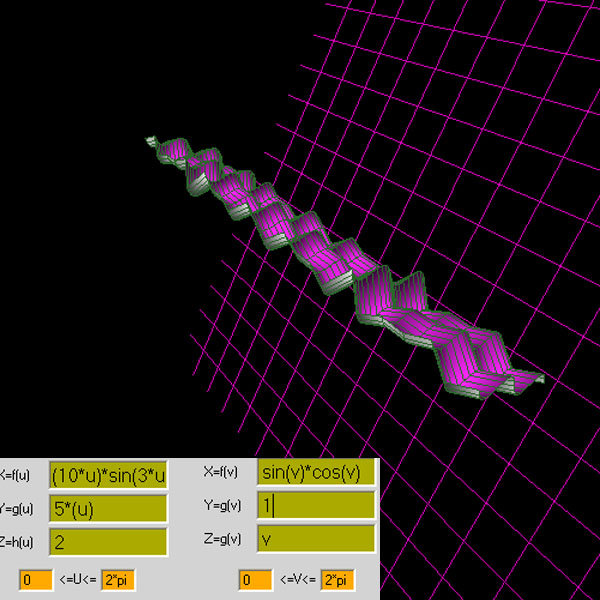
1. sin(u)*u*sin(u)
u
1
0<=u<=2*pi
2. sin(v)
1
v
0<=v<=2pi
u
1
0<=u<=2*pi
2. sin(v)
1
v
0<=v<=2pi
Odgovor: MAT 04 - Rotacione i translatorne površi
x=(3*(1+sin(u))+2*(1-cos(u)/2)*cos(u))*cos(u) y=3*u z=1 oko y ose

Odgovor: MAT 04 - Rotacione i translatorne površi
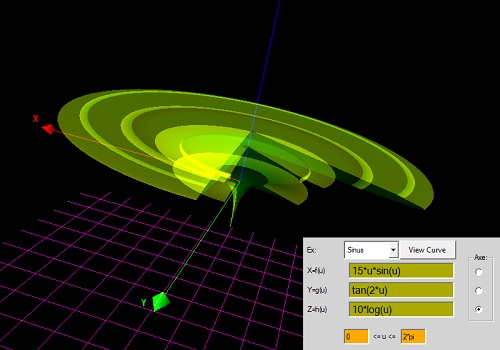
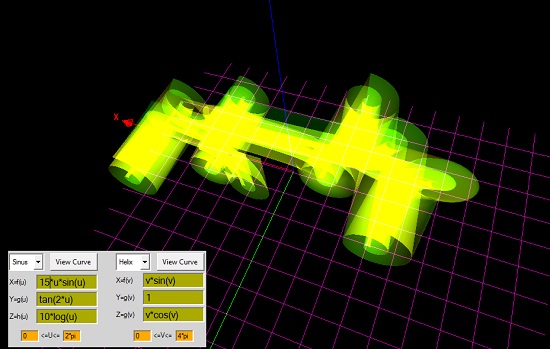
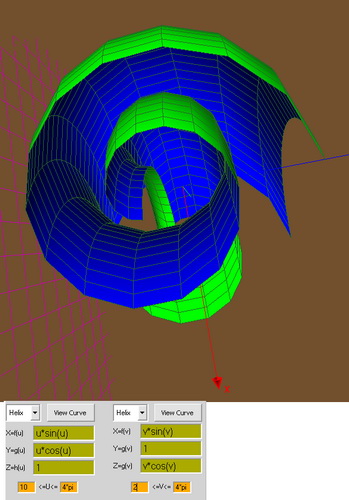
X=f(u)=5*sin(u*2)+cos(u)*2
Y=f(u)=2*u
Z=f(u)=1
0<u>3*pi
X=f(v)=v*sin(v)
Y=f(v)=1
Z=f(v)=v*cos(v)
0<v>4*pi
Y=f(u)=2*u
Z=f(u)=1
0<u>3*pi
X=f(v)=v*sin(v)
Y=f(v)=1
Z=f(v)=v*cos(v)
0<v>4*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
X sin(u)*cos(u)+sin(log(u))
Y log(u)*sin(cos(u))
Z sin(u)*cos(u)
0<=u<=2*pirotacija oko y ose


Odgovor: MAT 04 - Rotacione i translatorne površi
x= cos(cos(u))*sin(u)*4*u
y= log(u)*u*sin(4*u)
z= u
osa rotacije x
0<=u<=2*pi
y= log(u)*u*sin(4*u)
z= u
osa rotacije x
0<=u<=2*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
extrude
x=cos(cos(u))*sin(u)*4*u
y=log(u)*u*sin(4*u)
z=u
0<=u<=2*pi
kriva translacije:
x=0
y=0
z=v
0<=v<=2*pi
x=cos(cos(u))*sin(u)*4*u
y=log(u)*u*sin(4*u)
z=u
0<=u<=2*pi
kriva translacije:
x=0
y=0
z=v
0<=v<=2*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
Revolve
X=f(u) : cos(u)*sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*sin(u))^2)*sin(u)
Y=g(u) : u*sin(u)*sin(u)*cos(u)*cos(u)
Z=h(u) : sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*cos(u))^2)*cos(u)*sin(u)
X=f(u) : cos(u)*sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*sin(u))^2)*sin(u)
Y=g(u) : u*sin(u)*sin(u)*cos(u)*cos(u)
Z=h(u) : sqrt((sqrt((2*sin(u))))^2 + (sqrt((2*sin(u))^2 + (1)^2)*cos(u))^2)*cos(u)*sin(u)
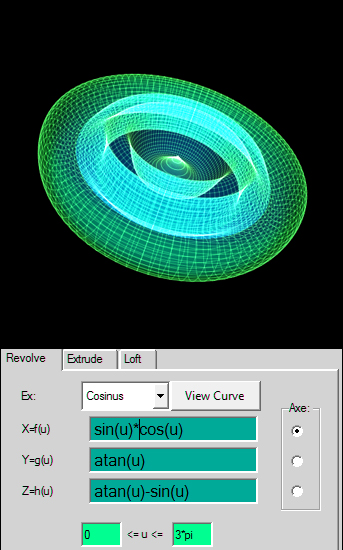
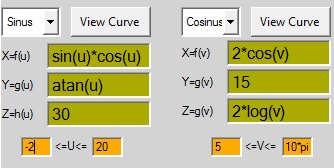
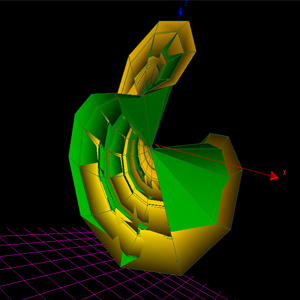
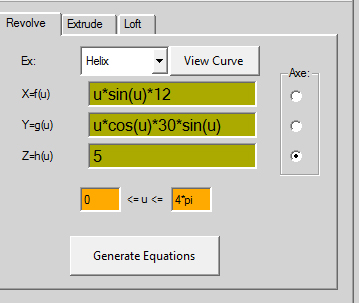
Odgovor: MAT 04 - Rotacione i translatorne površi
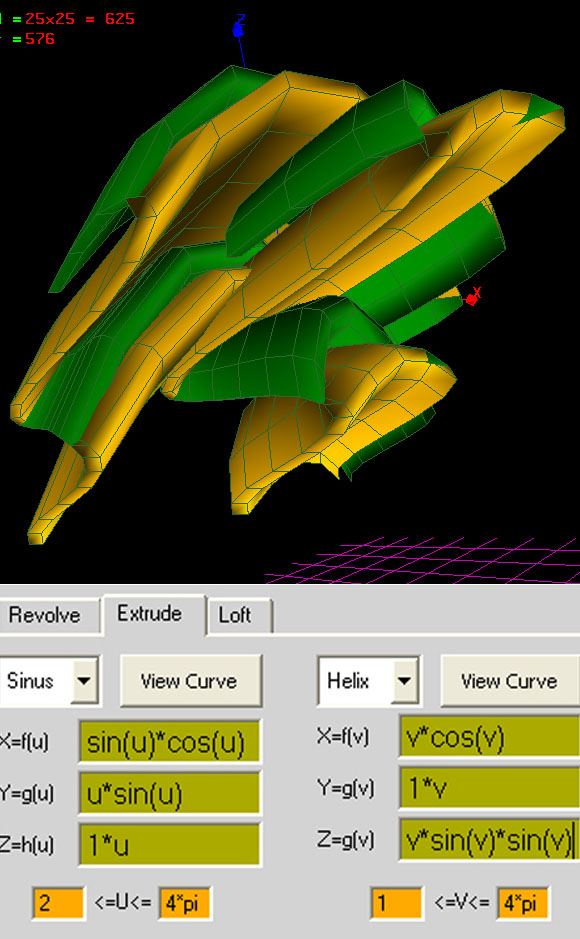
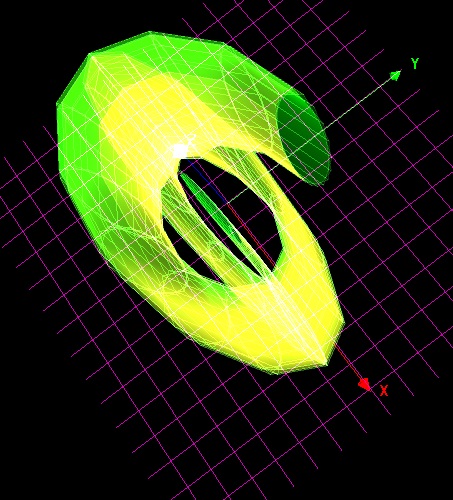
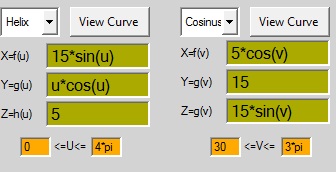
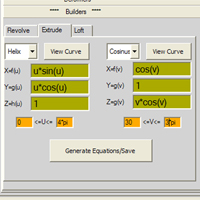
Extrude
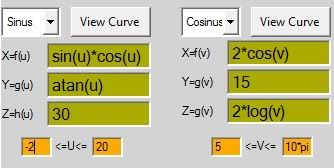
X=f(u) : 3*sin(u)*sin(u)
Y=g(u) : cos(u)*sin(u)
Z=h(u) : 2*sin(u)
U(0;4*pi)
X=f(v) : cos(v)
Y=g(v) : 30
Z=h(v) : 2*sin(v)
V(2*pi;3*pi)
X=f(u) : 3*sin(u)*sin(u)
Y=g(u) : cos(u)*sin(u)
Z=h(u) : 2*sin(u)
U(0;4*pi)
X=f(v) : cos(v)
Y=g(v) : 30
Z=h(v) : 2*sin(v)
V(2*pi;3*pi)
u: U(0;5*pi)
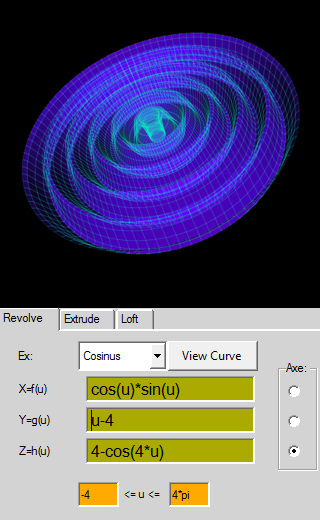
Odgovor: MAT 04 - Rotacione i translatorne površi
K3Dsurf
rotaciona...
kosinus
X=cos(u)*5*sin(u);
Y=cos(u)+3*sin(u);
Z=1/2
oko x ose, interval od 3 do 4*pi
rotaciona...
kosinus
X=cos(u)*5*sin(u);
Y=cos(u)+3*sin(u);
Z=1/2
oko x ose, interval od 3 do 4*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
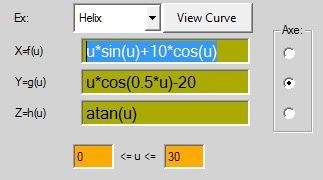
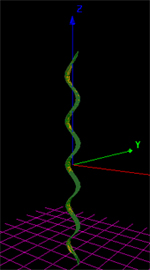
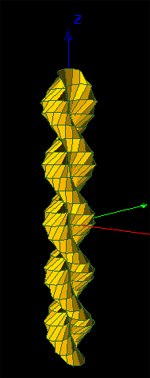
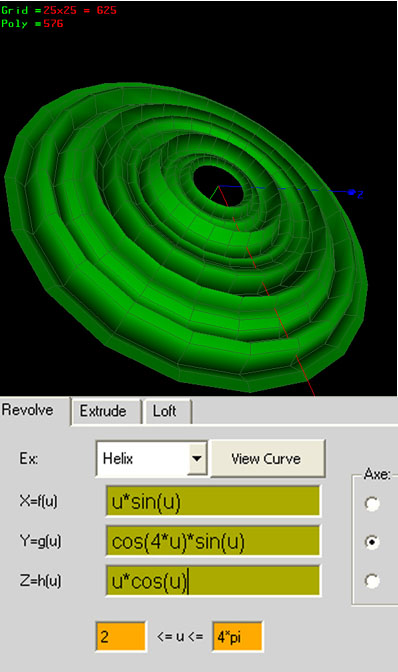
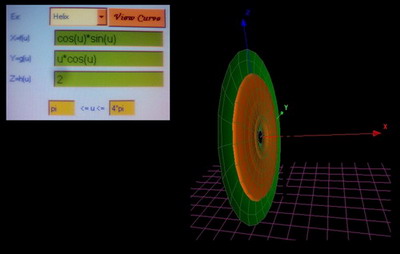
Ex: helix
X=f(u) u*sin(u)+10*cos(u)
Y=g(u) u*cos(0.5*u)+0.5*u
Z=h(u) atan(u)
0<=u<=4*pi


 " />
" />
Odgovor: MAT 04 - Rotacione i translatorne površi
revolve:
X=f(u) sin(u)*cos(u)*u
Y=g(u) u (rotacija oko y-ose)
Z=h(u) log(u)
u od 0 do 2*pi
X=f(u) sin(u)*cos(u)*u
Y=g(u) u (rotacija oko y-ose)
Z=h(u) log(u)
u od 0 do 2*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
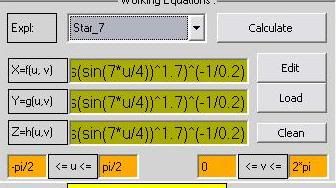
Xf(U)=sin(u)
Yg(U)=2*sin(7*u)*sin(u)
Zh(U)=2*cos(u)
0<= u <= 3*pi
Yg(U)=2*sin(7*u)*sin(u)
Zh(U)=2*cos(u)
0<= u <= 3*pi

Odgovor: MAT 04 - Rotacione i translatorne površi
Revolve
X=f(u) cos(u)*sin(u)
Y=g(u) cos(u)
Z=h(u) atan(u)-cos(u)
0<=u<=4*pi
oko x ose

X=f(u) cos(u)*sin(u)
Y=g(u) cos(u)
Z=h(u) atan(u)-cos(u)
0<=u<=4*pi
oko x ose
Odgovor: MAT 04 - Rotacione i translatorne površi
Uprkos malim tehnickim problemima evo ponovo mog zadatka,nadam se boljeg :)
funkcija:
funkcija:
Odgovor: MAT 04 - Rotacione i translatorne površi
nazalost, ne snalazim se bas najbolje sa matematikom , zato ovi radovi i nisu bas sjajni.
Odgovor: MAT 04 - Rotacione i translatorne površi
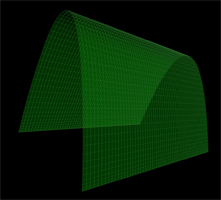
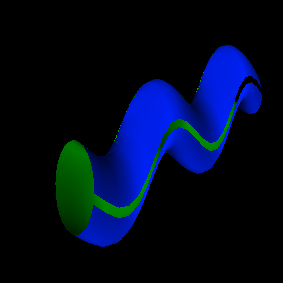
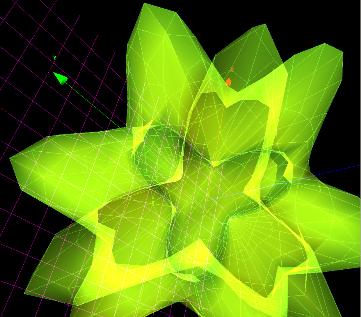
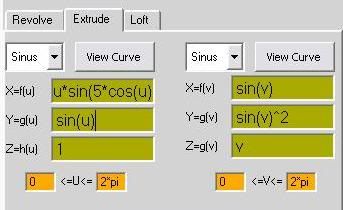
K3DSurf
translatorna površ
X: 2*u
Y: 5*v
Z: 1/3*u^3 - 1/2*v^2
-2<=u<=2
-2<=v<=2
translatorna površ
X: 2*u
Y: 5*v
Z: 1/3*u^3 - 1/2*v^2
-2<=u<=2
-2<=v<=2
Odgovor: MAT 04 - Rotacione i translatorne površi
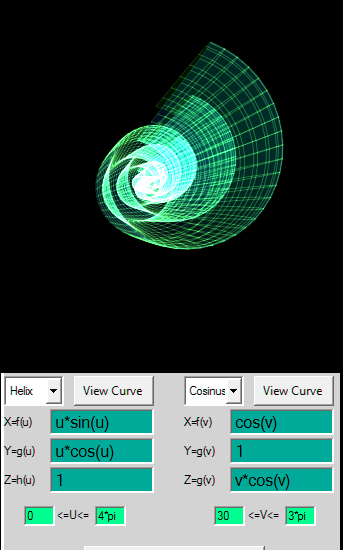
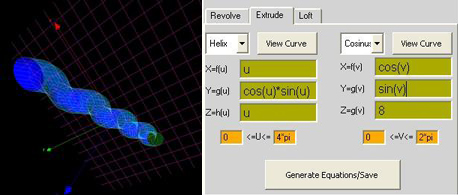
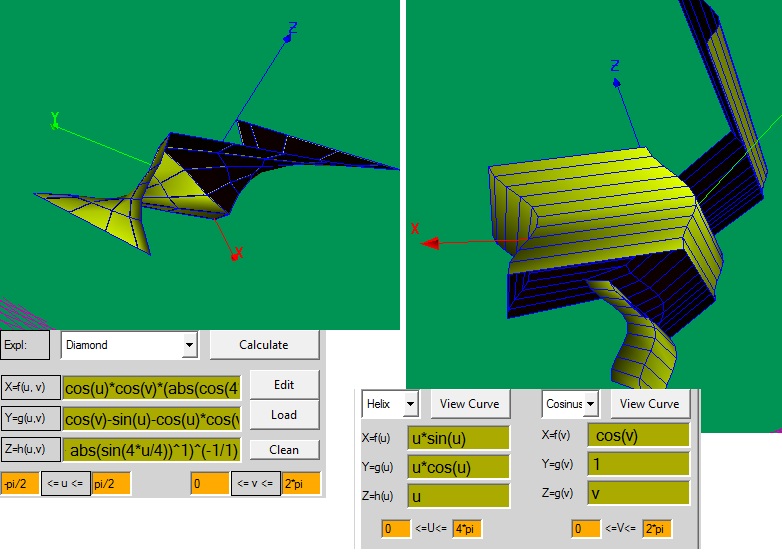
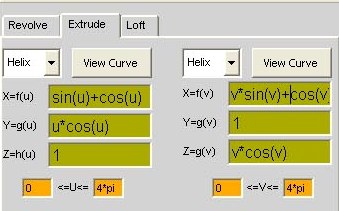
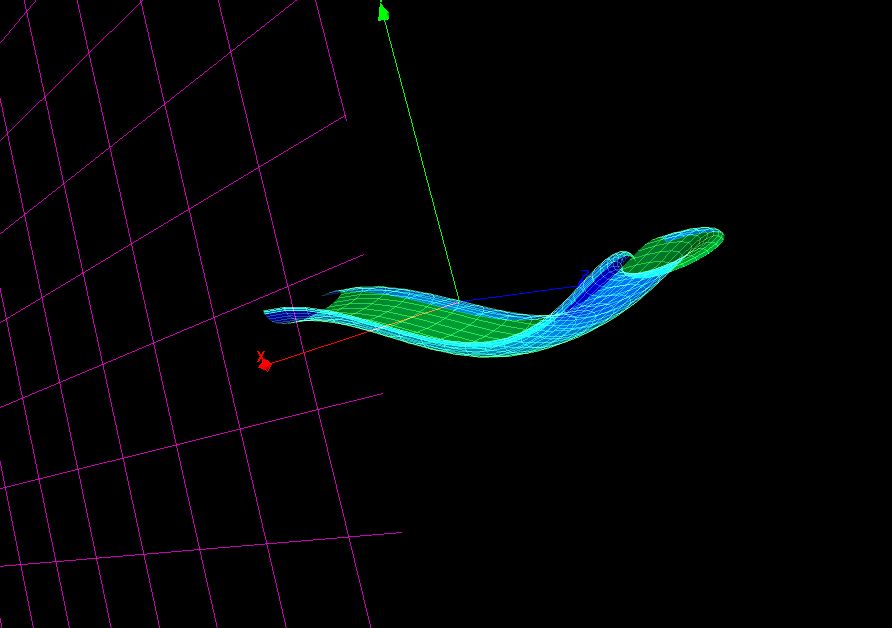
rotacija i translacija
ex: Helix
X=f(u) =u
Y=g(u) =cos(u)
Z=h(u) =1
0<=u<=4*pi
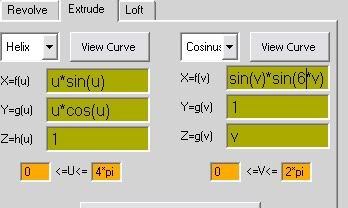
extrude
sinus
X=f(u) =sin(u)
Y=g(u) =cos(u)
Z=h(u) =-cos(u)
0<=u<=4*pi
cosinus
X=f(v) =sin(v)
Y=g(v) =cos(v)
Z=h(v) =v
0<=u<=4*pi
ex: Helix
X=f(u) =u
Y=g(u) =cos(u)
Z=h(u) =1
0<=u<=4*pi
extrude
sinus
X=f(u) =sin(u)
Y=g(u) =cos(u)
Z=h(u) =-cos(u)
0<=u<=4*pi
cosinus
X=f(v) =sin(v)
Y=g(v) =cos(v)
Z=h(v) =v
0<=u<=4*pi
Odgovor: MAT 04 - Rotacione i translatorne površi
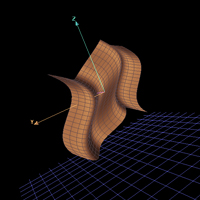
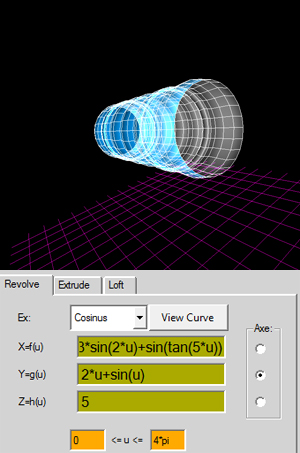
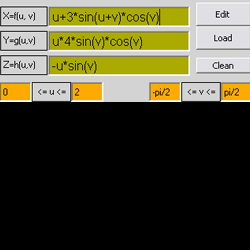
x+3*sin(2*u)+sin(tan(5*u))
y+3*u+sin(u)
z=5
0<u>4*pi
rotacija oko y ose