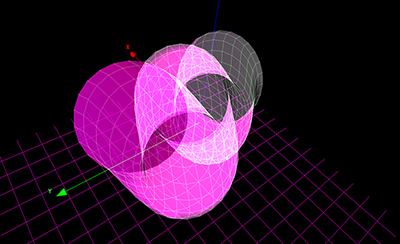
rotacija
SINUS
X=f(u): sin(u)*2
Y=g(u): cos(u)*2+cos(u)
Z=h(u): sin(u)*2
0 <= u <= 4*pi
COSINUS
X=f(v): sin(v)+cos(v+v)
Y=g(v): v
Z=h(v): cos(v+v)
0 <= v <= 2*pi
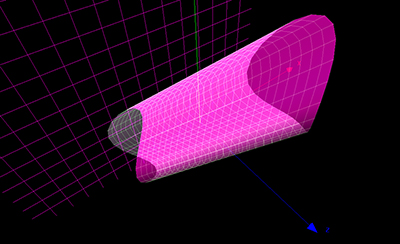
translacija
SINUS
X=f(u): cos(u*2)
Y=g(u): cos(u)*2+cos(u)
Z=h(u): sin(u)*2
0 <= u <= 4*pi
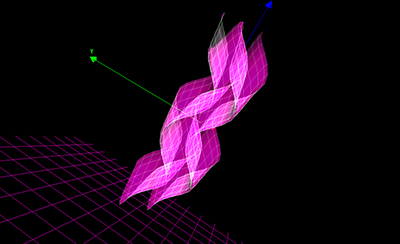
// 3. kriva mi je bila inicijalno prva vezba rotacije ali njeni podaci su mi se izbrisali, ipak odlucio sam da je postavim na sajt jer cenim njenu vrednost.