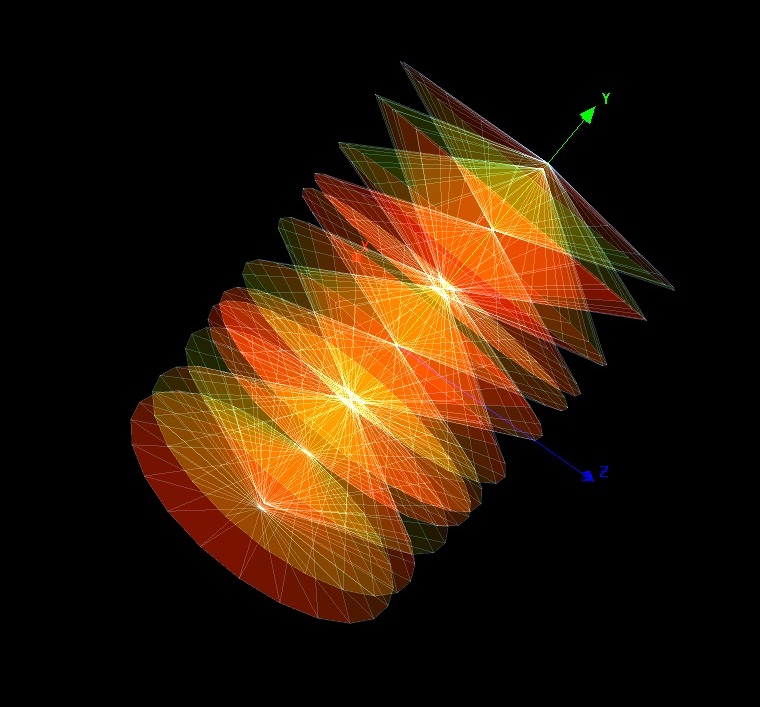
a) Rotacija
Xf(u)=sin(4*u)*cos(2*u)
Yg(u)=sin(u)*cos(u)+1/5*u
Zh(u)=0
0<=U<=3*pi
Rotacija oko y ose
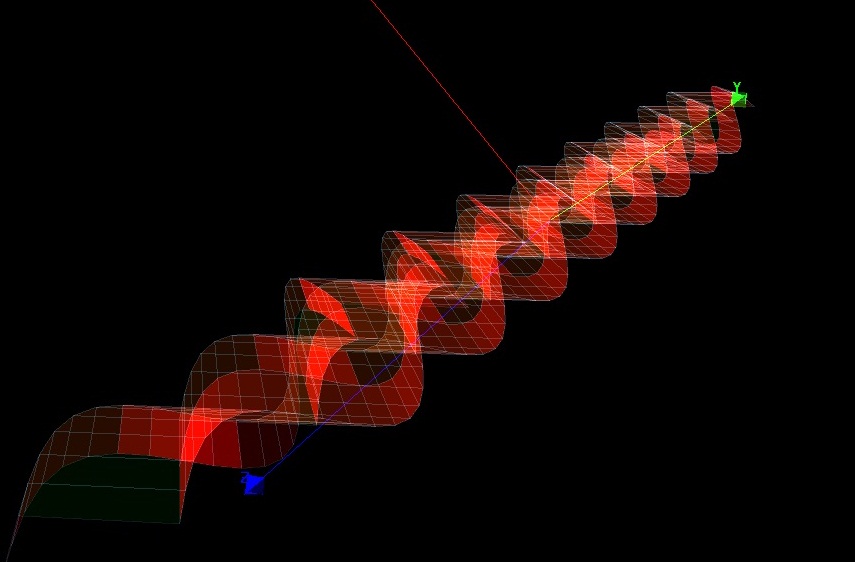
b) Translacija
Xf(u)=sin(3*u)
Yg(u)=2*u*sin(u)
Zh(u)=cos(u)
0<=U<=pi
Xf(u)=sin(4*v)
Yg(u)=2*v
Zh(u)=sin(4*v)
0<=U<=4*pi
a) Rotacija
Xf(u)=sin(4*u)*cos(2*u)
Yg(u)=sin(u)*cos(u)+1/5*u
Zh(u)=0
0<=U<=3*pi
Rotacija oko y ose
b) Translacija
Xf(u)=sin(3*u)
Yg(u)=2*u*sin(u)
Zh(u)=cos(u)
0<=U<=pi
Xf(u)=sin(4*v)
Yg(u)=2*v
Zh(u)=sin(4*v)
0<=U<=4*pi