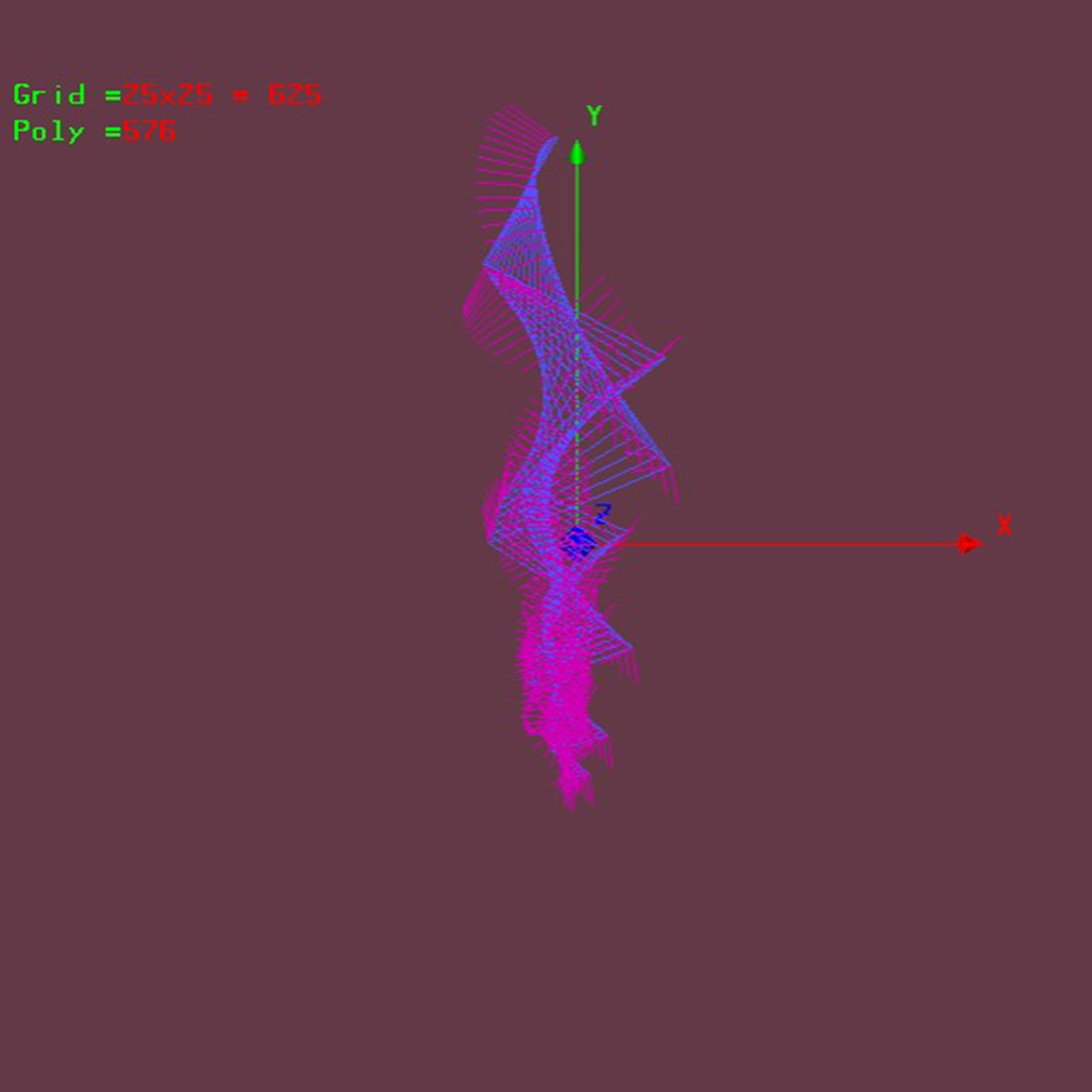
Rotacija oko y ose:
x = u*v*sin(v)+u^2
y = 20*u+v^2
z = v^2-u^2*3
-6 <u< 6 -25 <v< 25
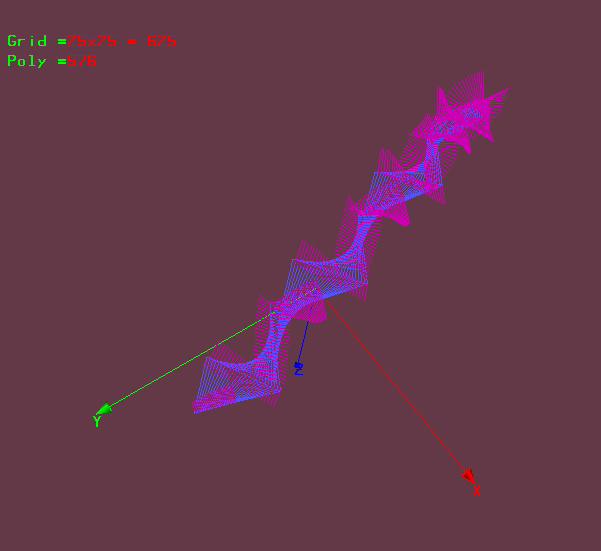
Translacija:
x = u*v*sin(v)
y = 10*u+v^2
z = v^2-u