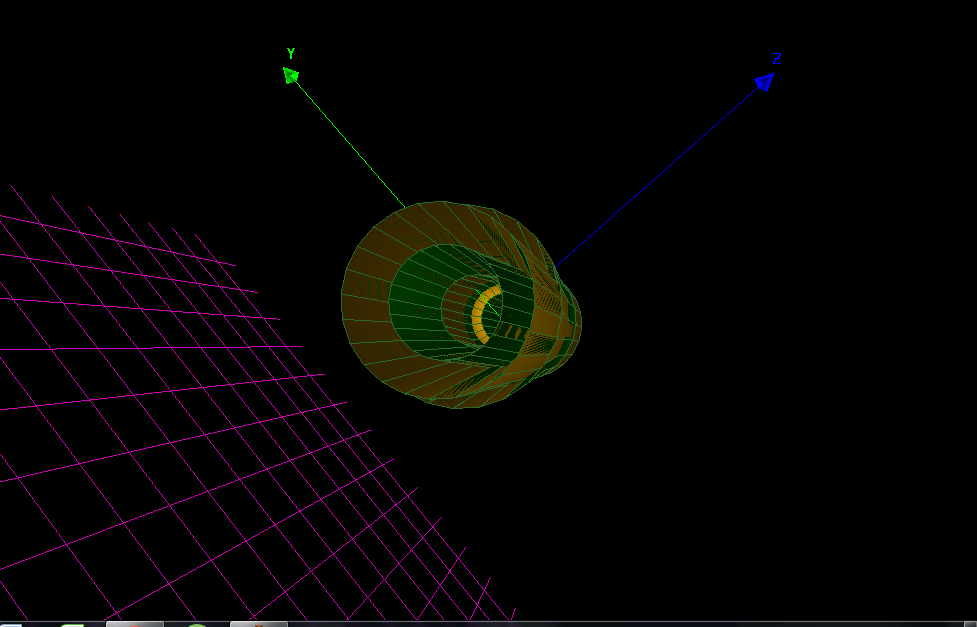
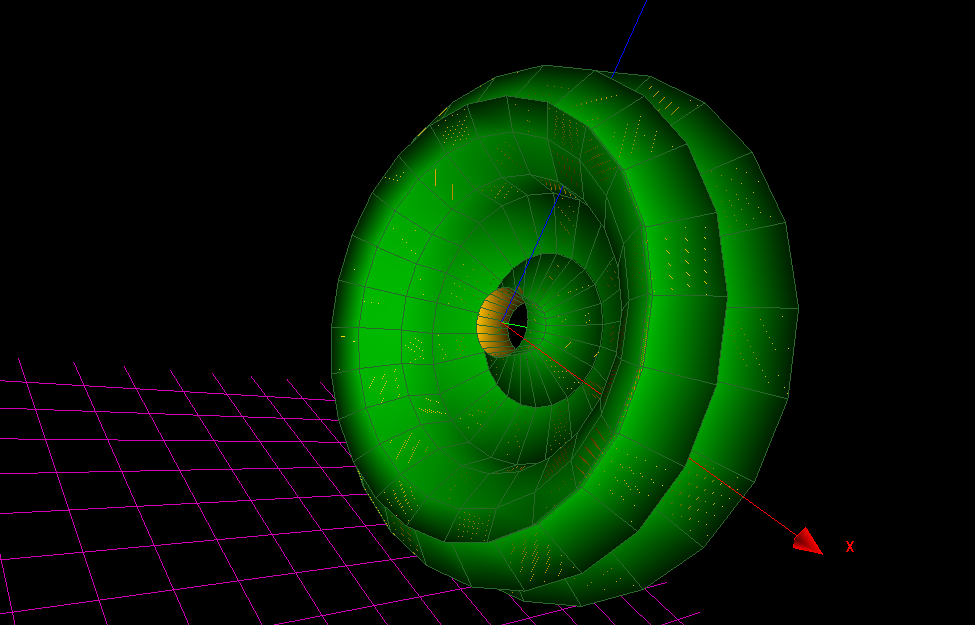
x=f(u,v) - sqrt((10*sin(u*5)+cos(u*10))^2 + (1)^2)*sin(v)
Y=g(u,v) - 2.5*sin(u)
Z=h(u,v) - sqrt((10*sin(u*5)+cos(u*10))^2 + (1)^2)*cos(v)
0<=u<=5*pi
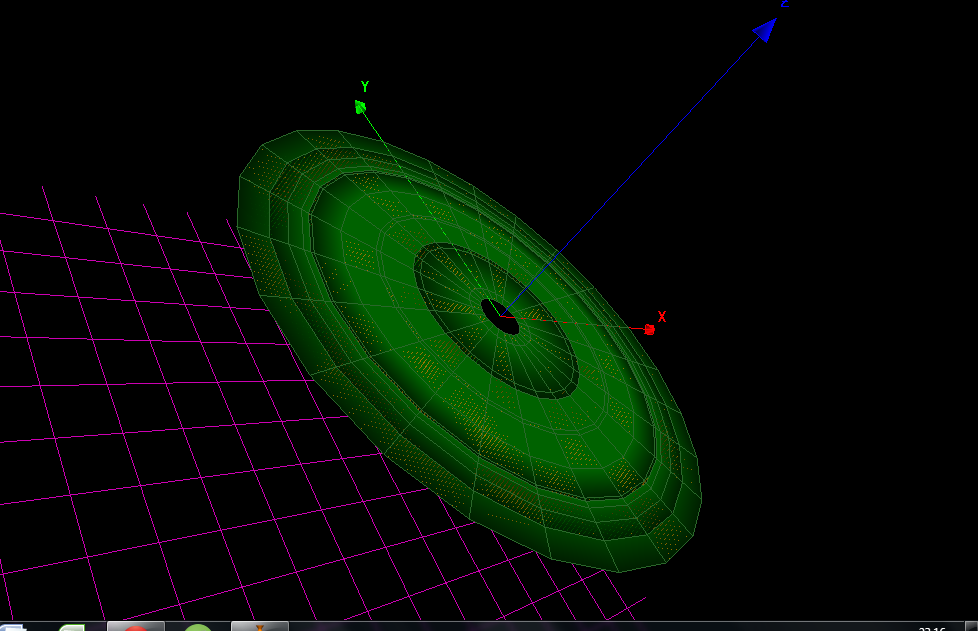
X=f(u) - 10*sin(u*5)+cos(u*10)
Y=g(u) - 2.5*sin(u)
Z=h(u) - 1
0<=<=5*pi
roacija oko ose X
rotacija oko ose Y
rotacija oko ose Z