Rotacija
Rotacija oko ose x
x=f(u) : sin(u)
y=g(u) : u
z=h(u) : 1
0<=u<=2*pi
Translacija
x=f(u,v) : u*cos(v)+u
y=g(u,v):u+sin(u)
z=h(u,v):sin(v)
-1<=u<=5 0<=v<=2*pi
x=f(u,v):u
y=g(u,v):u+cos(u)
z=h(u,v):u+sin(u)
o<=u<=5 0<=u<=2*pi
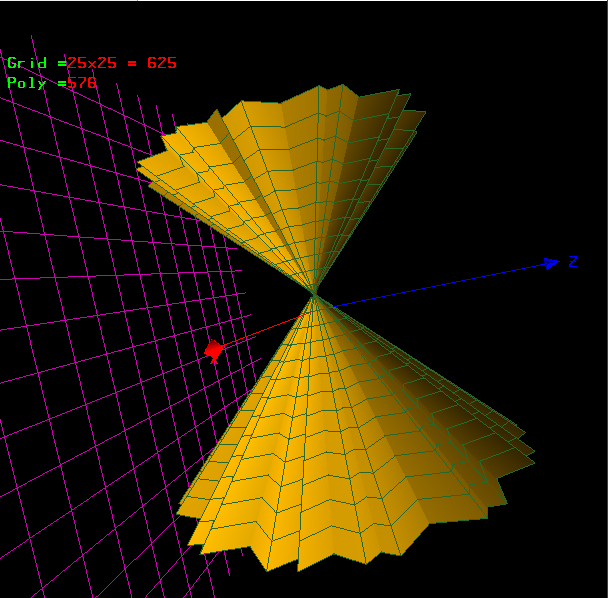
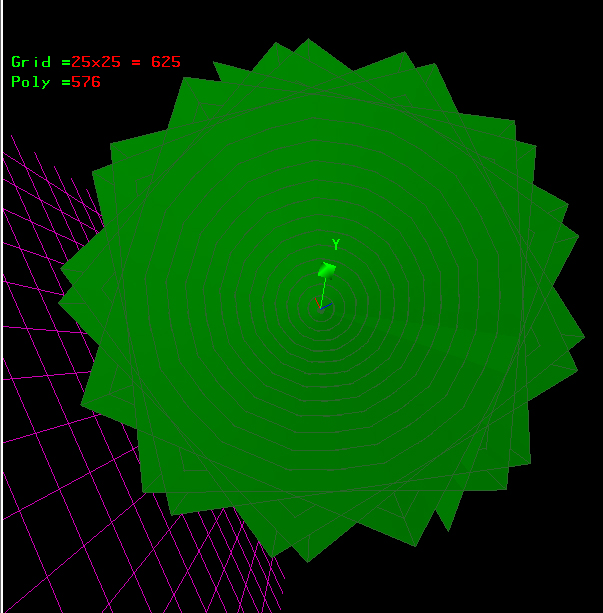
Rotacija
Rotacija oko ose x
x=f(u) : sin(u)
y=g(u) : u
z=h(u) : 1
0<=u<=2*pi
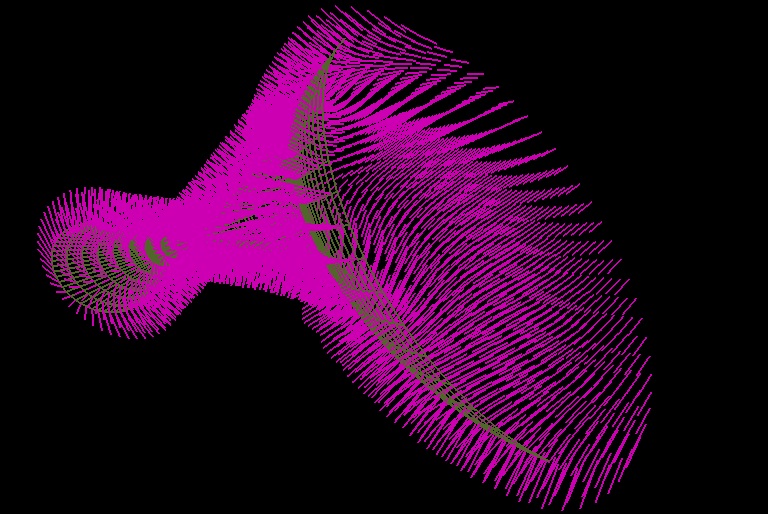
Translacija
x=f(u,v) : u*cos(v)+u
y=g(u,v):u+sin(u)
z=h(u,v):sin(v)
-1<=u<=5 0<=v<=2*pi
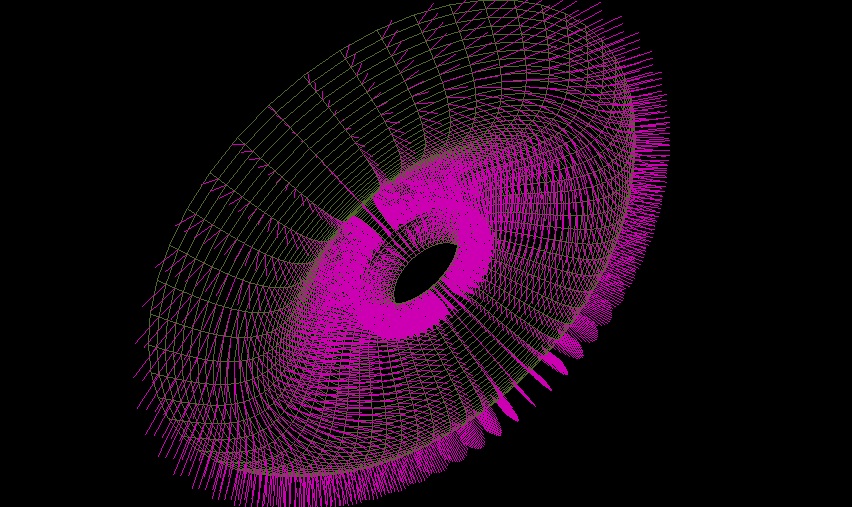
x=f(u,v):u
y=g(u,v):u+cos(u)
z=h(u,v):u+sin(u)
o<=u<=5 0<=u<=2*pi