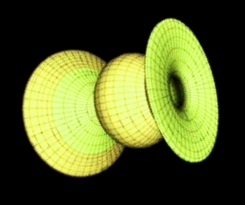
ROTACIJA rotira oko x ose
x=sin(u)*atan(u)
y=log10(u*1/4)
z=log10(u*1/2)-cos(u*2)
pi*1/3<=u<=2*pi
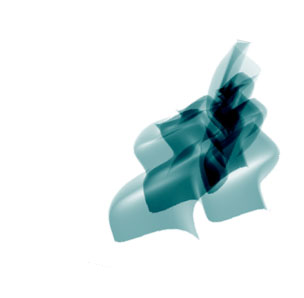
TRANSLACIJA
X= (int(u)+cos(5*u))*sin(5*u)
Y= cos(10*u)*sin(5*u)*atan(25*u)-log(5*u)
Z= cos(u)*atan(u)
0<= u <=pi
Translira po krivoj:
X=sin(v)*cos(v)
Y=atan(v)
Z=v
0<= v <=2*pi