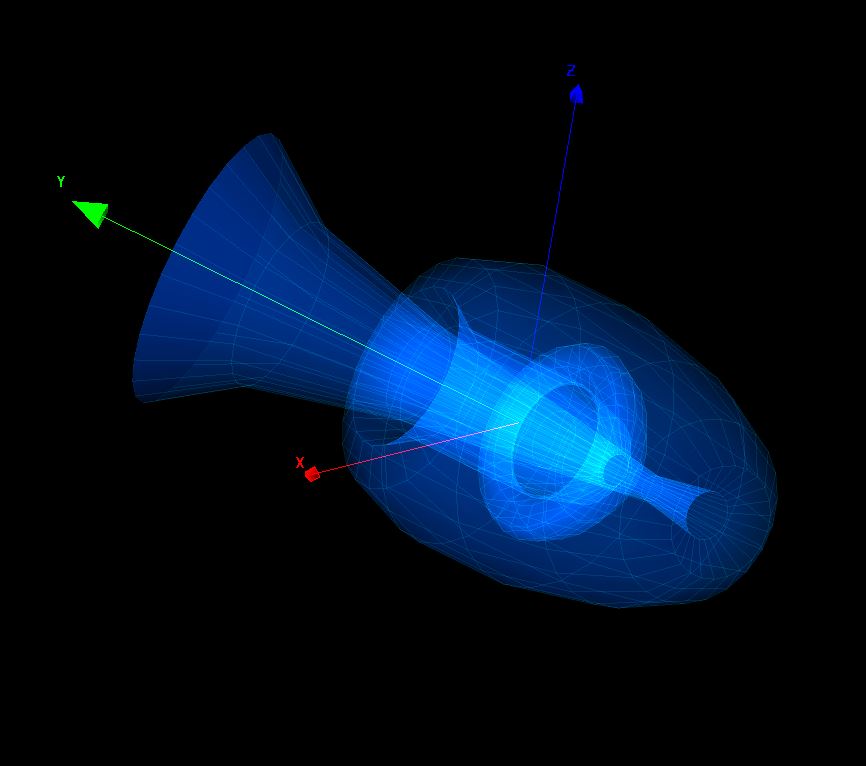
ROTACIJA
Ex: Sinus
x=2*(1+cos(u))
y=cos(u)*2*u
z=u*1/2+6*sin(u)
0<=u<=4*pi
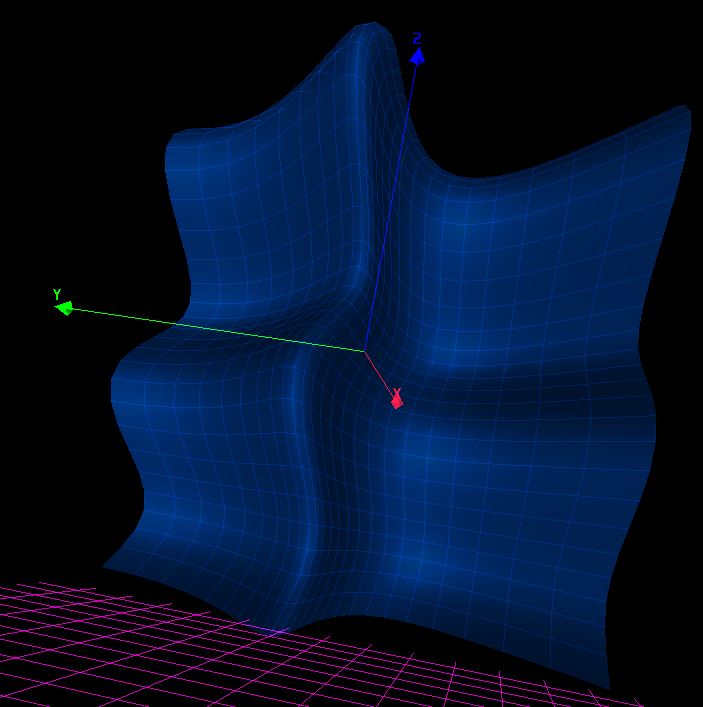
TRANSLACIJA
Sinus
x=2*sin(1.2*u)+sin(1/2*u)
y=sin(u)+u
z=1
0<=u<=2*pi
Sinus
x=sin(2*v)
y=1
z=v
0<=v<=2*pi
ROTACIJA
Ex: Sinus
x=2*(1+cos(u))
y=cos(u)*2*u
z=u*1/2+6*sin(u)
0<=u<=4*pi
TRANSLACIJA
Sinus
x=2*sin(1.2*u)+sin(1/2*u)
y=sin(u)+u
z=1
0<=u<=2*pi
Sinus
x=sin(2*v)
y=1
z=v
0<=v<=2*pi