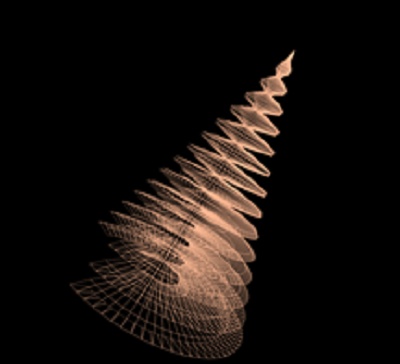
Rotacija
X=sin(u)*cos(u)
Y=2*u*cos(3*u)
Z=5*u
0<=u<=5*pi
rotacija oko Z ose
Translacija
X=3*sin(u)
Y=cos(u)+u
Z=-3*(u)
0<=u<=8*pi
X=v+cos(v)*cos(v)
Y=v+cos(v)*sin(v)
Z=2*v
0<=v<=5*pi