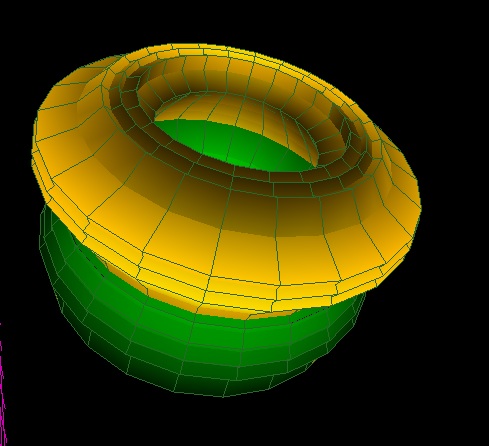
sinus
x=3*sin(u)+3*cos(u)
y=3*sin(u)
z=3*cos(u)
granice parametara : 0<=u<=7*pi
rotacija oko Y ose
Translacija: