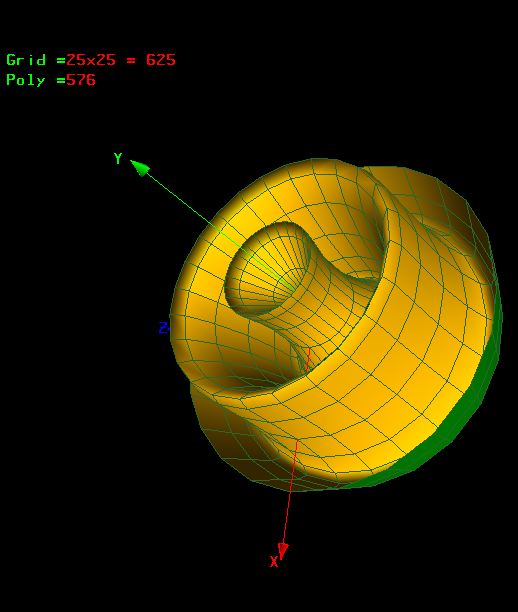
Rotacija po Y-osi
X= cos(u)*3*sin(u)
Y= sin(u)*2*cos(u)*3
Z= u
0 <=u<= 2*pi
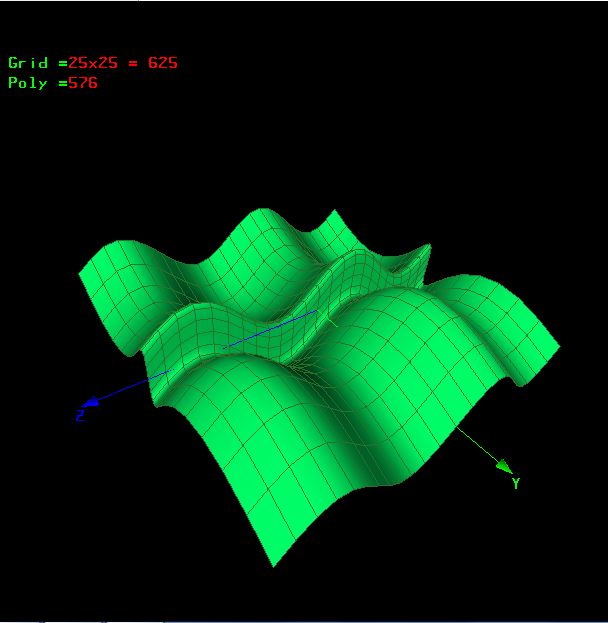
Translacija
X= sin(u)*cos(u)
Y= u*1+sin(u)
Z= 2
0 <=U<= 2*pi
X= sin(v)*cos(v)
Y= 2
Z= v
0 <=V<= 2*pi
Rotacija po Y-osi
X= cos(u)*3*sin(u)
Y= sin(u)*2*cos(u)*3
Z= u
0 <=u<= 2*pi
Translacija
X= sin(u)*cos(u)
Y= u*1+sin(u)
Z= 2
0 <=U<= 2*pi
X= sin(v)*cos(v)
Y= 2
Z= v
0 <=V<= 2*pi