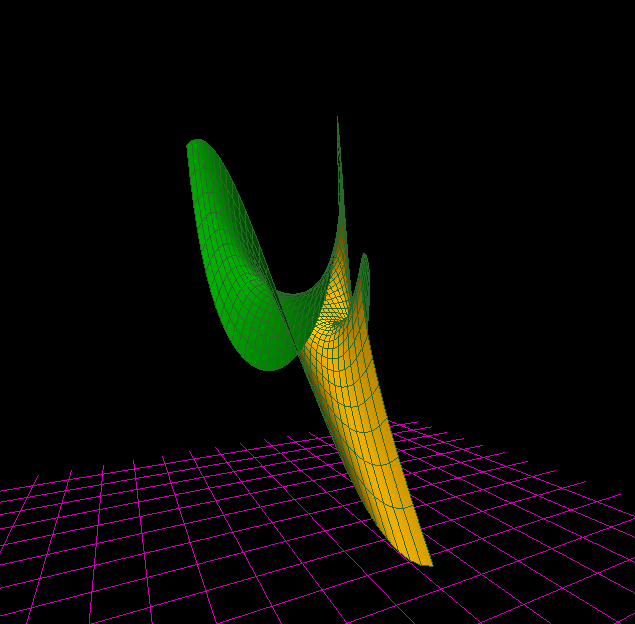
Xf = u-u^3/2+u*v^1
Yg= u^1-v^1
Zh = v-v^3/2+v*u^2
-2 <=u=< 2
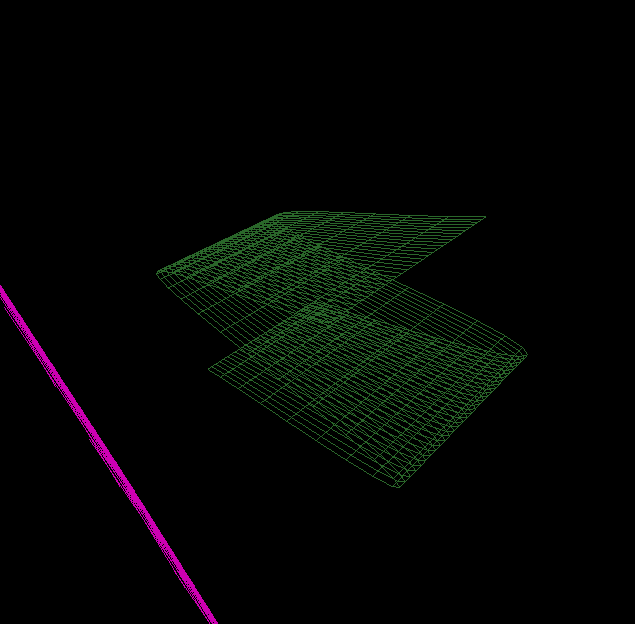
rotacija po Y osi
Xf = 4*sin(2*u)
Yg = 1*u
Zh = v
-2 <= u =< 2