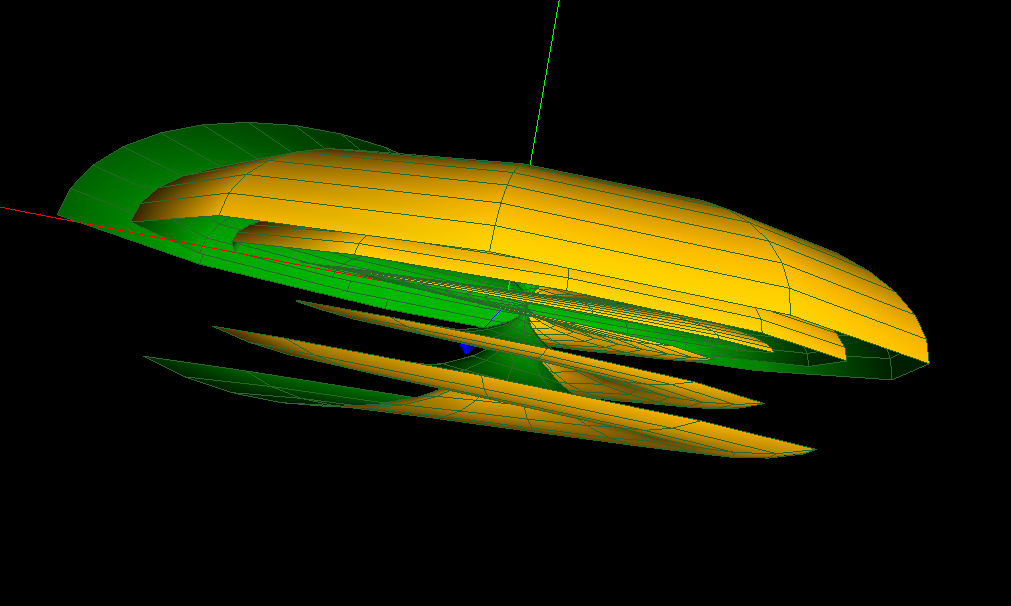
rotacija po y-osi
X= sin(u)*cos(v)
Y= (sin(v)+log(tan(v/2)))+0.2*u
Z= cos(u)*cos(v)
0 < u < 15,4
0,1 < v < 3
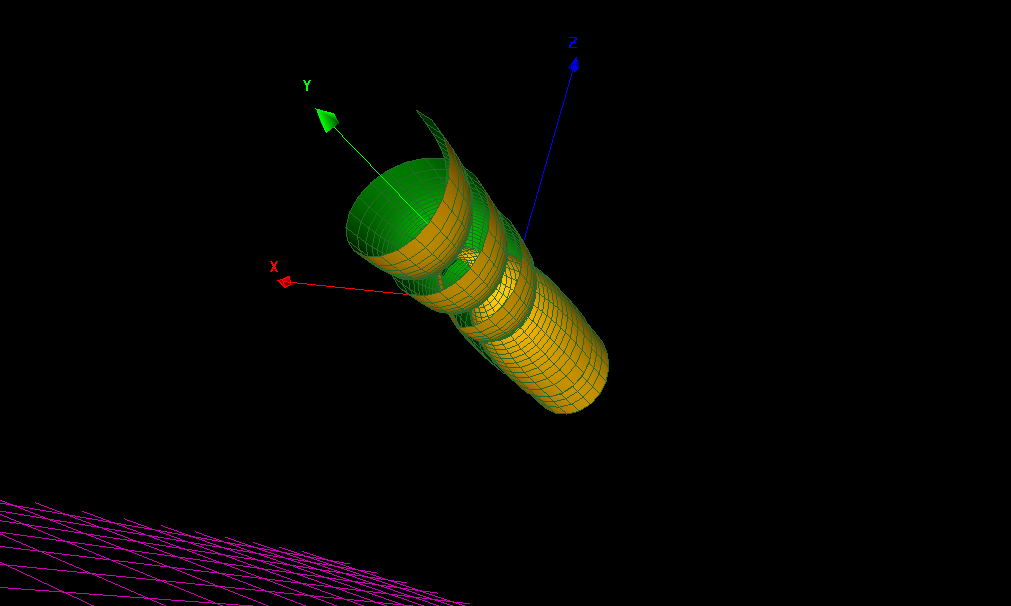
translacija
X= (2-v/(2*pi))*cos(3*v)*(1+cos(u))
Y= 1,2*(1-v/(2*pi))*sin(u)
Z= 1,2*(1-v/(2*pi))*sin(3*v)*(1+cos(u))
0 < u < 2*pi
0 < v < 2*pi
rotacija po y-osi
X= sin(u)*cos(v)
Y= (sin(v)+log(tan(v/2)))+0.2*u
Z= cos(u)*cos(v)
0 < u < 15,4
0,1 < v < 3
translacija
X= (2-v/(2*pi))*cos(3*v)*(1+cos(u))
Y= 1,2*(1-v/(2*pi))*sin(u)
Z= 1,2*(1-v/(2*pi))*sin(3*v)*(1+cos(u))
0 < u < 2*pi
0 < v < 2*pi