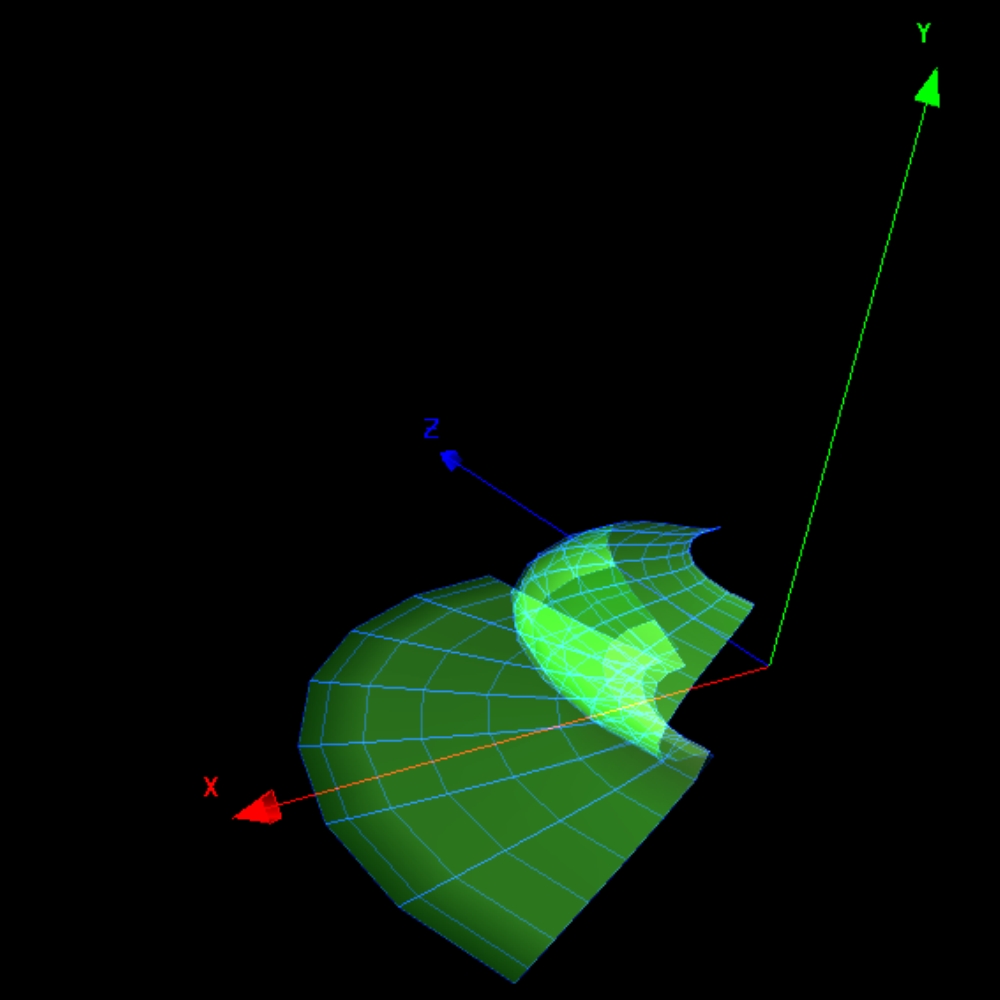
а.Ротација
Xf(u)=2*sin(u)+cos(u*2)*2
Yg(u)=sin(u)
Zh(u)=1
0<=U<=2*pi
ротирано око y осе
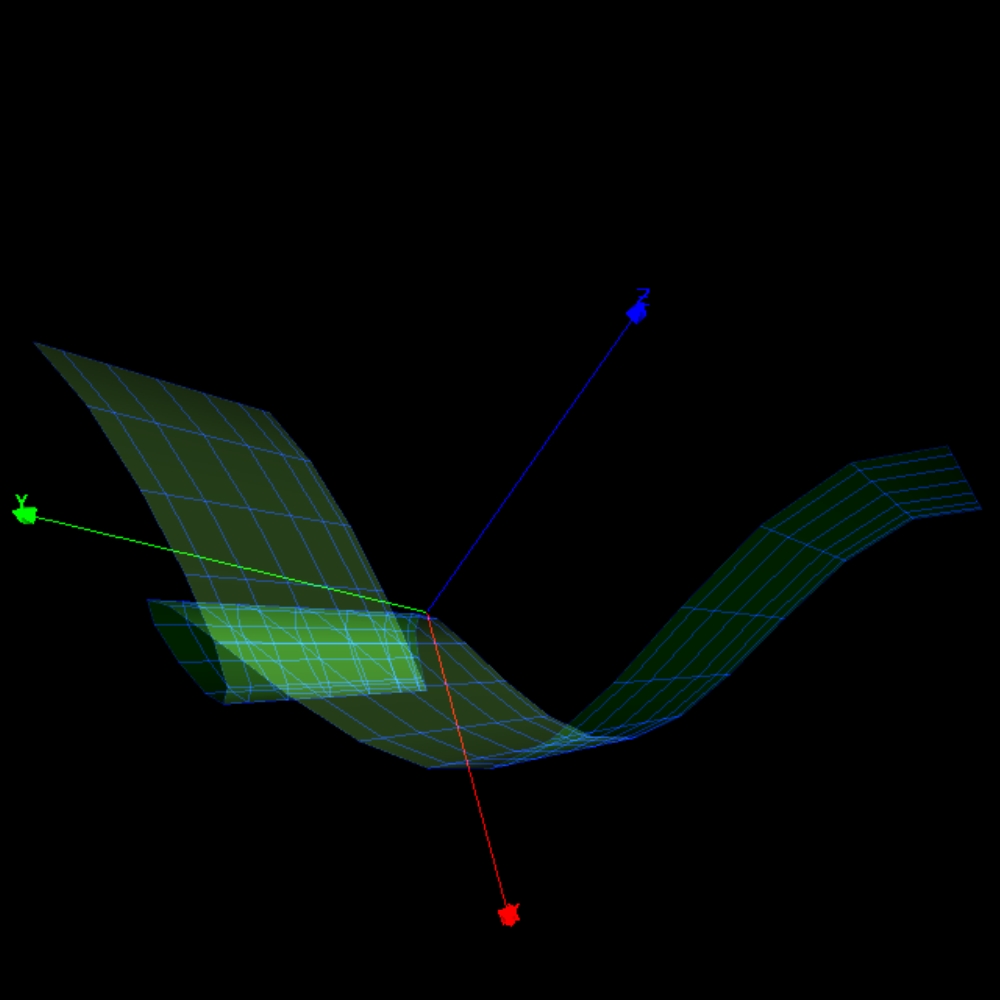
б.Транслација
X=f(u)=sin(u)*4*sin(u)
Y=g(u)=2*u+sin(u)
Z=h(u) =2*cos(u)
X=f(v)=2*cos(v)
Y=g(v)=4
Z=g(v)=2*cos(v)
0<=V<=3*pi