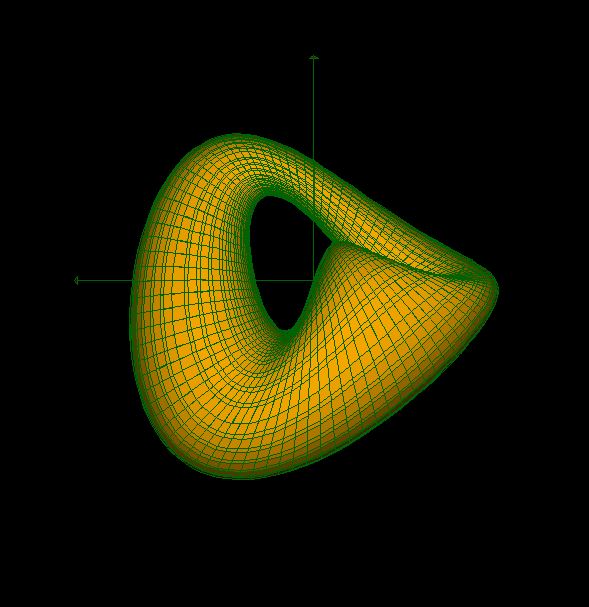
Rotacija:
X=f(u,v) (3*(1+sin(v))+2*(1-cos(v)/2)*cos(u))*cos(v)
Y=g(u,v) -2*(1-cos(u)/2)*sin(u)
Z=h(u,v) (4+2*(1-cos(v)/2*cos(u))*sin(u)
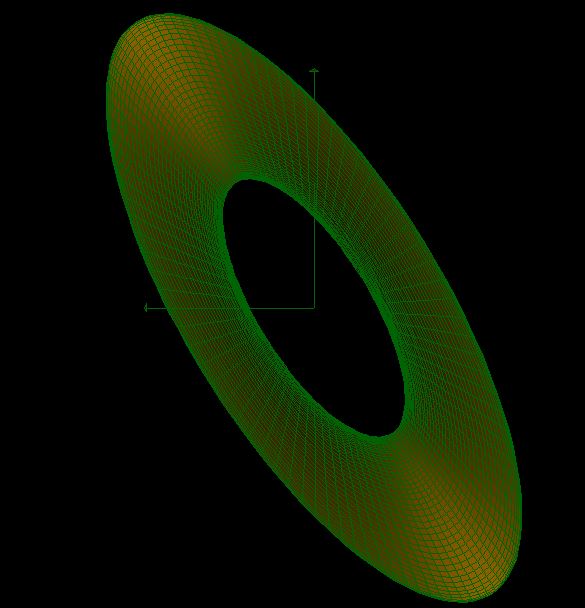
Translacija:
X= 1/2*cos(u)+1/2*sin(u)
Y= sin(u)
Z= sin(v)