Rotacija oko x-ose
X=f(u)= cos(u)*1*(1*u)*sin(2*u)
Y=g(u)= 3-2*cos(2*u)
Z=x(u)= 2
0<=U<=6*pi
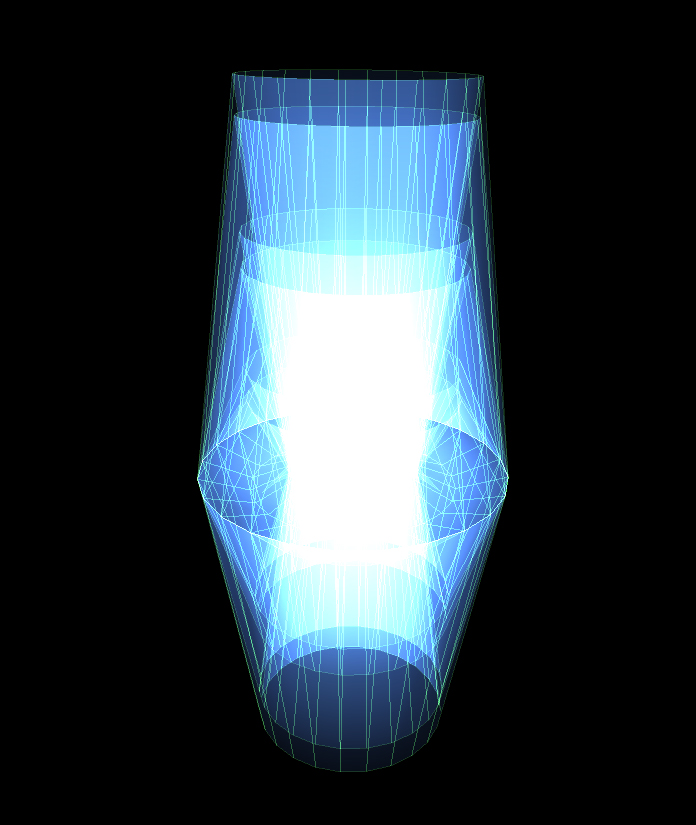
Translacija
X=f(u)= sin(u)*3*cos(u) X=f(v)= 4*sin(v)
Y=g(u)= 4*sin(u) Y=g(u)= v*1
Z=h(u)= u Z=h(v)= 2*v
0<=U<=2*pi 0<=V<=2*pi