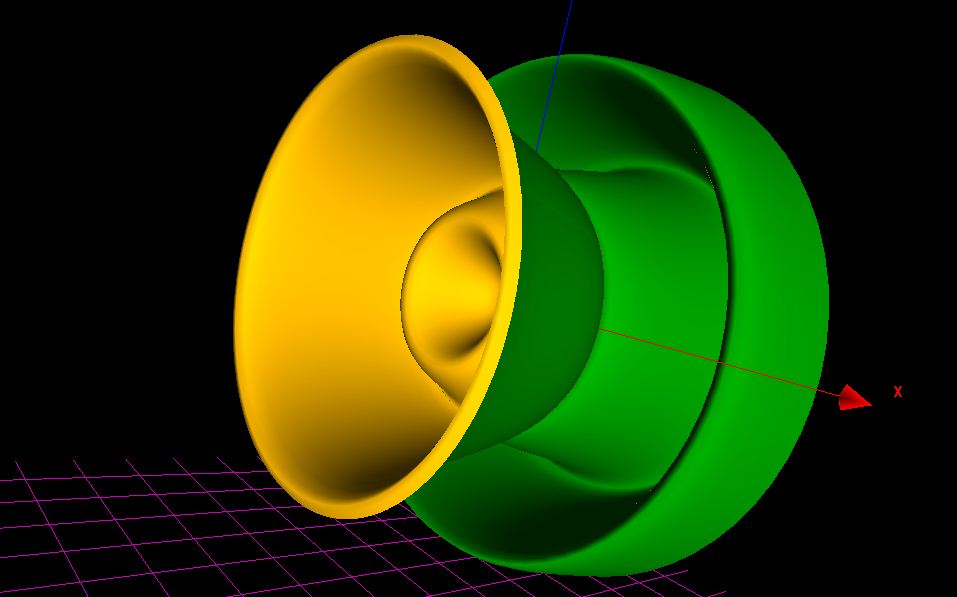
a) rotacija po y osi
x= u*cos(v)
Y=u*sin(u)*sin(u)
Z= u*sin(v)
7 <= u <= -5
1 <= v <= 10
b) translacija
X= cos(v)*sin(v)*cos(v)*cos(u)*v
Y= cos (u)*sin( v)
Z= v