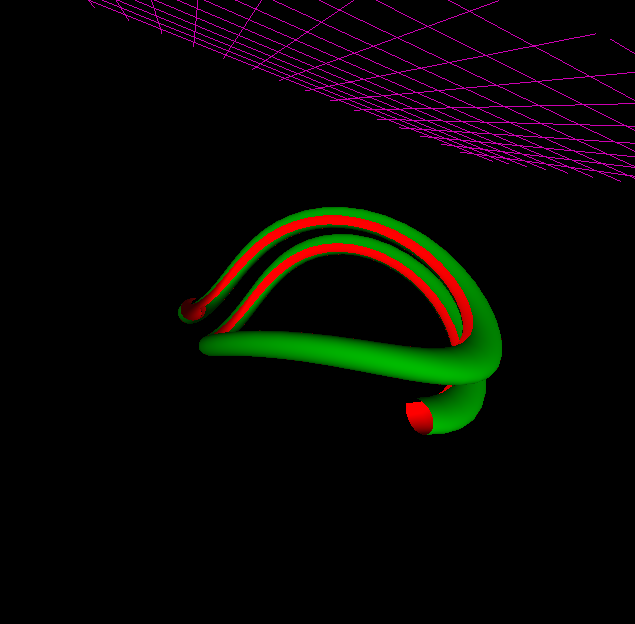
rotacija
x=f(u,v) cos(u)*sin(v)
y=g(u,v)cos(u)+log(tanv(2)))+0,2*v
z=h(u,v) sin(u)*sin(v)
0<=u<=13,4
0,1<=v<=2
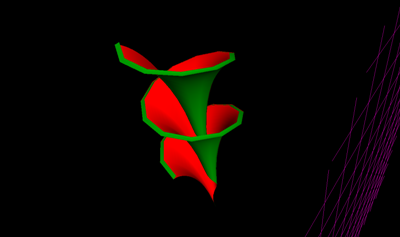
translacija
x=f(u,v) 0,717627*(1-o,1*cos(v))*cos(u)*cos(((1-0,1*cos(u))*sin(u)-1,1*2*pi*0,2/2,2)
y=g(u,v) 0,1*sin(v)+v*(1,7-10)*cos((1,1-0,1*cosv))*sin(v)-1,1)*2*pi*0,2/2,2))
z=h(u,v)
0<=u<=4*pi
0<=v<=2*pi