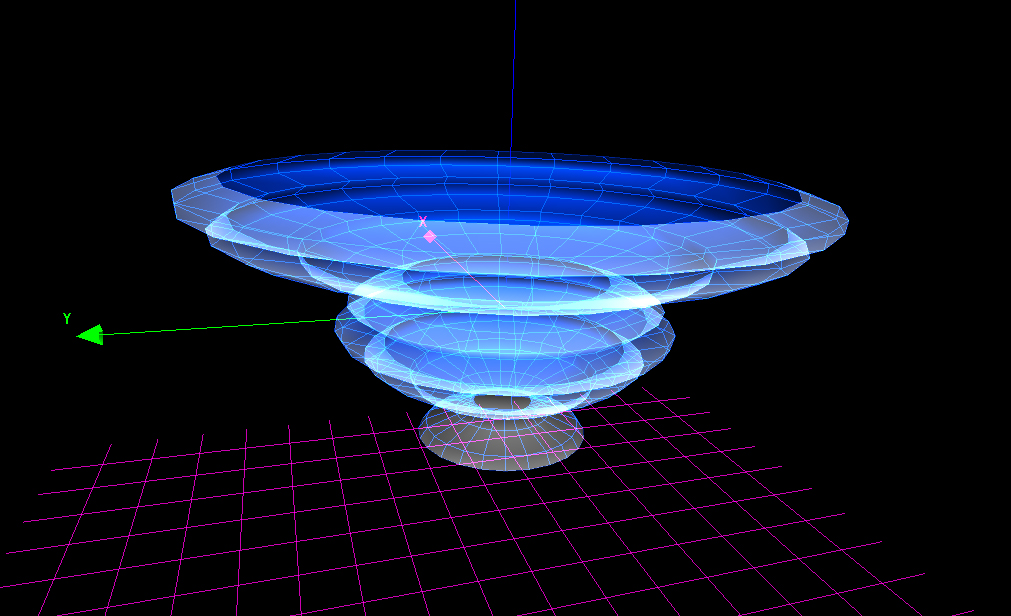
a.
Ex: Sinus
X=f(u): sin(u)*2+cos(4*u)-u
Y=g(u): 4*cos(u)+sin(2*u)/3
Z=h(u): u
0 <= U <=4*pi
Rotacija oko z ose.
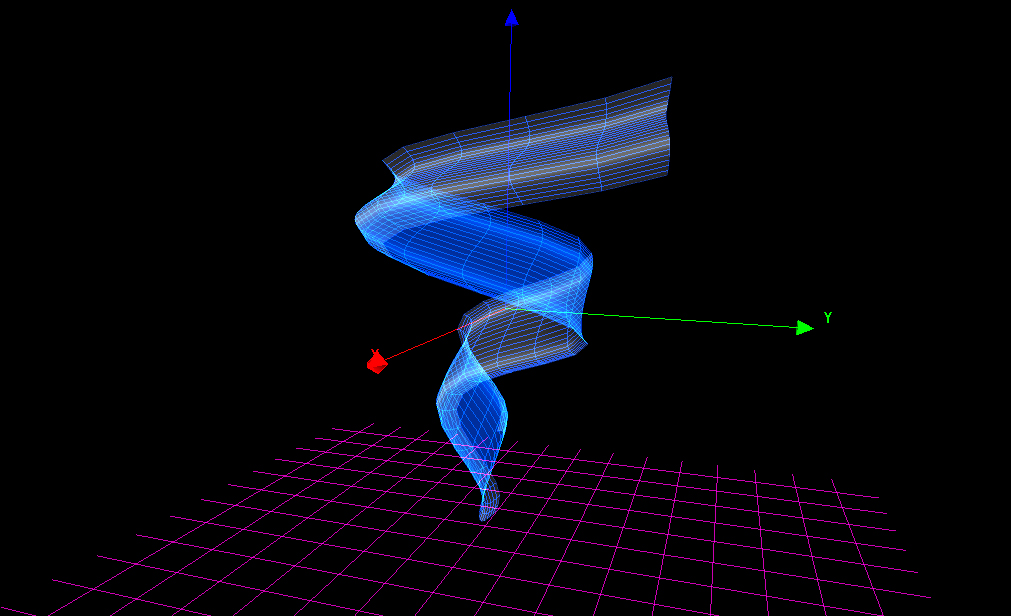
b.
Sinus Sinus
X=f(u): sin(u)*2 X=f(u): sin(v)*4-cos(v)
Y=g(u): u*sin(2-u) Y=g(u): sin(v)/2
Z=h(u): 2*u Z=h(u): v
0 <= U <= 4*pi 0 <= V <= 2*pi