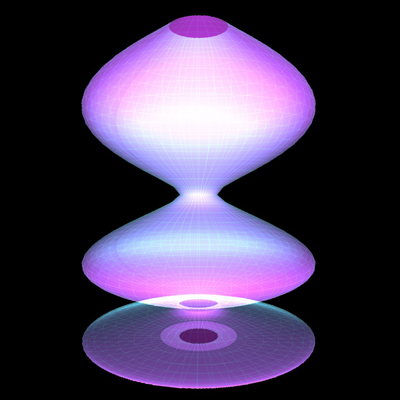
1.
X=cos(u^2)*3 Y=u^2*cos(u)*0.6+15*sin(u) Z=0.5 7<=u<=2*pi rotacija oko y ose
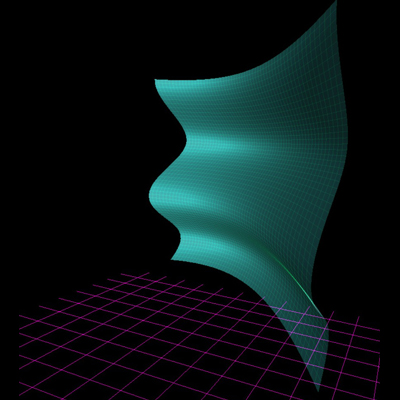
2.
X=cos(u)*9*u+sin(2*u) Y=u^2 Z=1 10<=U<=3*pi X=2*cos(v) Y=1 Z=v 2<=V<=4*pi