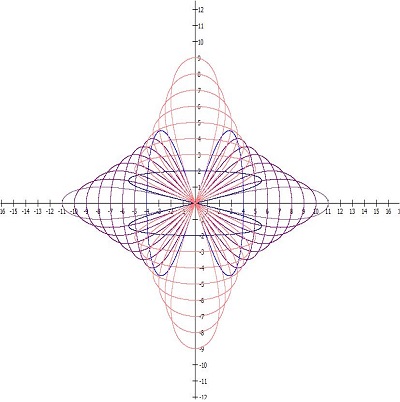
Pomoću programa MathGV Function Plotting parametarski definisati i prikazati grafički izabrane krive u ravni (ilustracije veličine 400/400 piksela). U tekstu dati parametarski oblik svih krivih koje se nalaze na slici, kao i granice parametara.
Zadatak 01 - Krive u ravni
Zadatak 01 - Krive u ravni
Zadatak 01 - Krive u ravni
Odgovor: Zadatak 01 - Krive u ravni
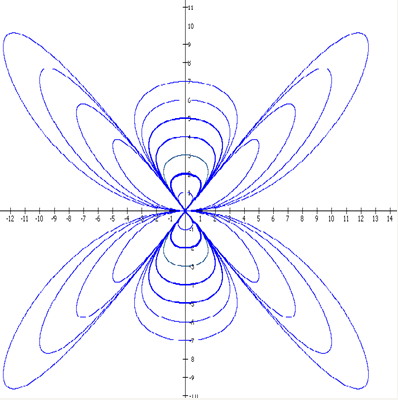
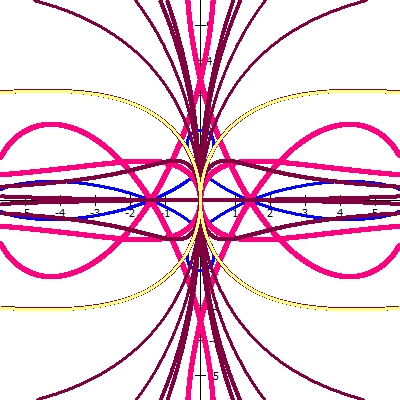
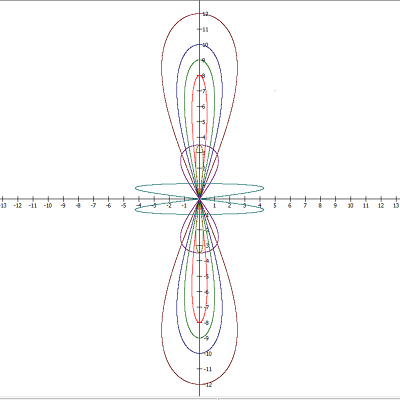
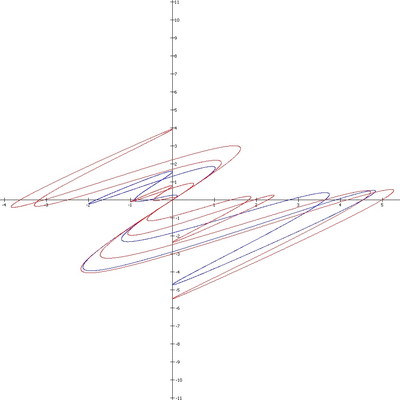
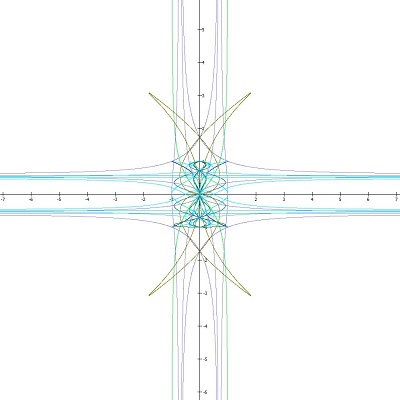
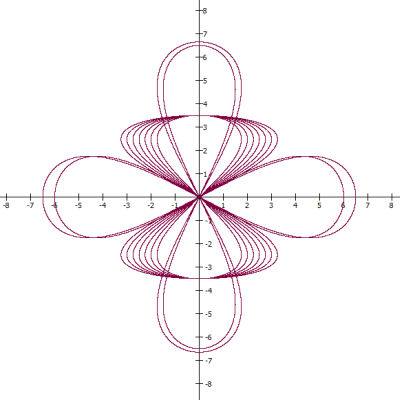
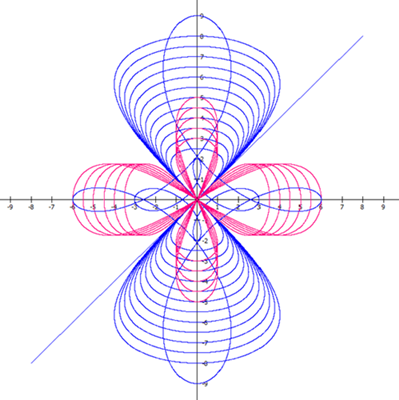
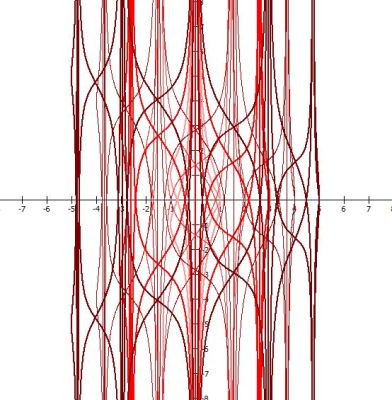
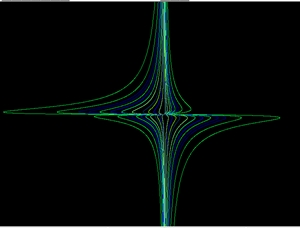
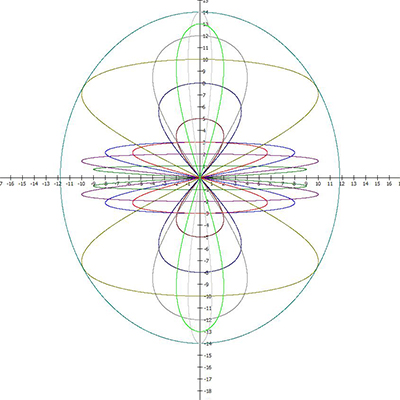
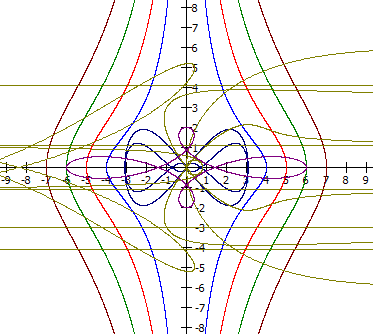
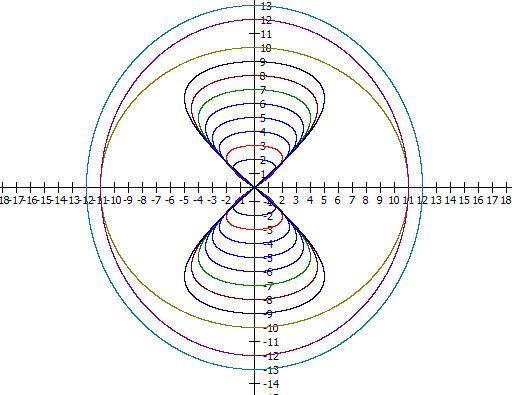
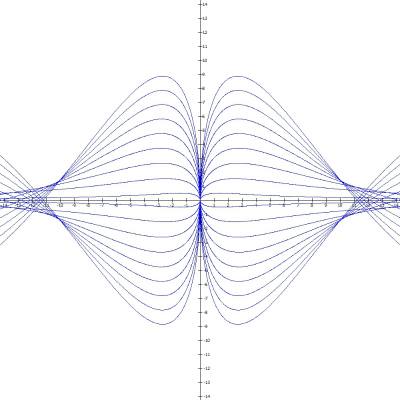
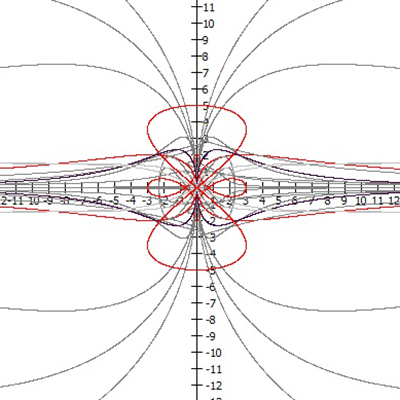
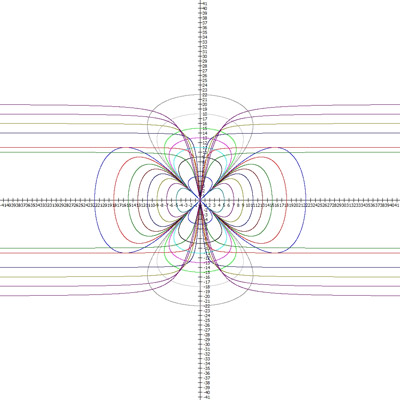
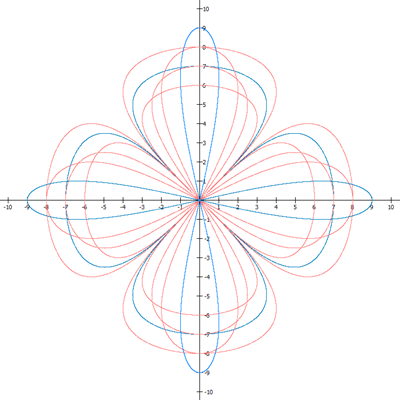
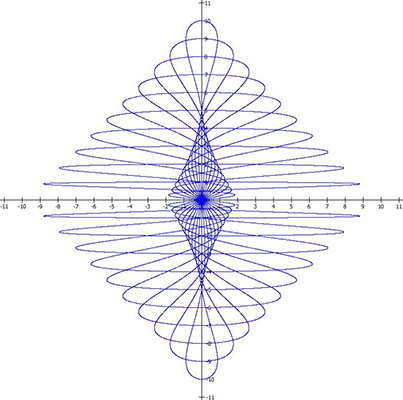
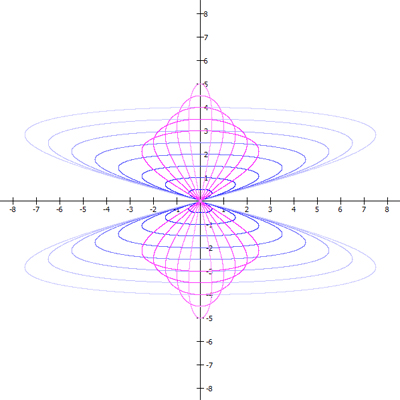
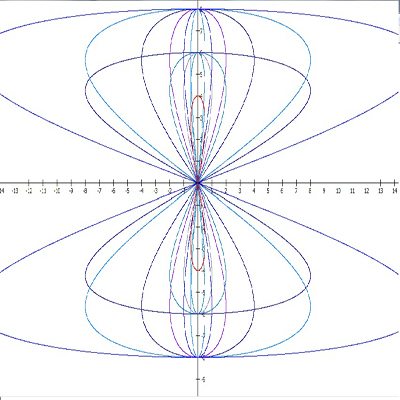
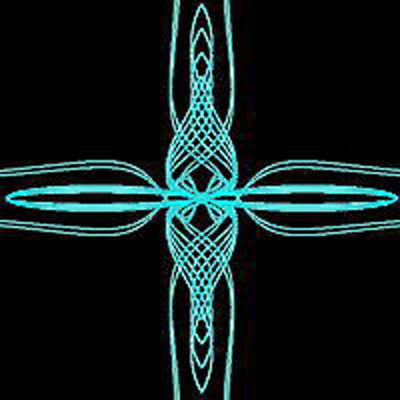
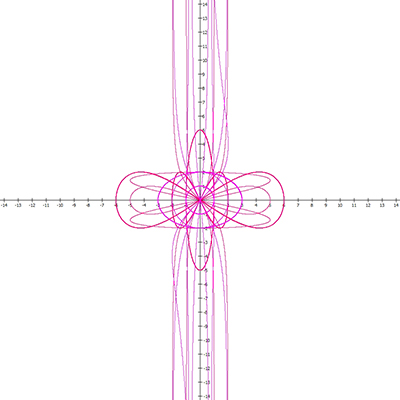
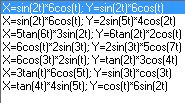
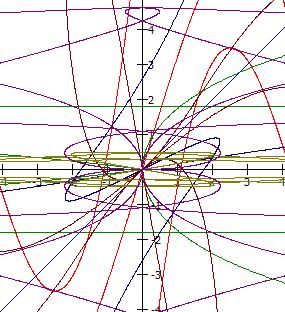
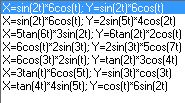
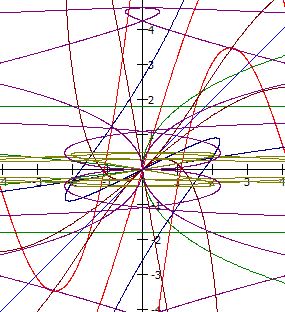
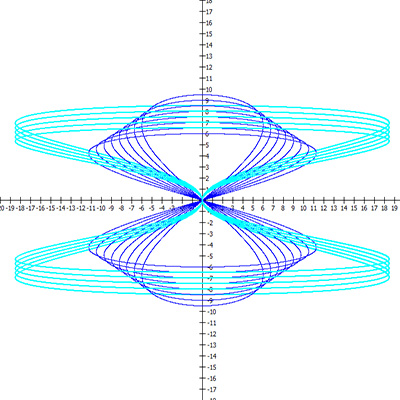
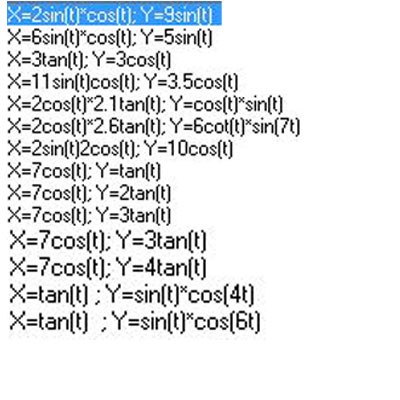
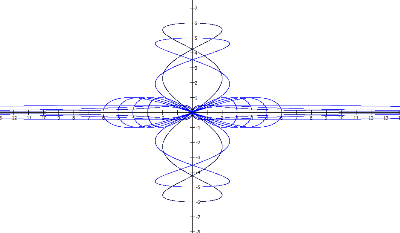
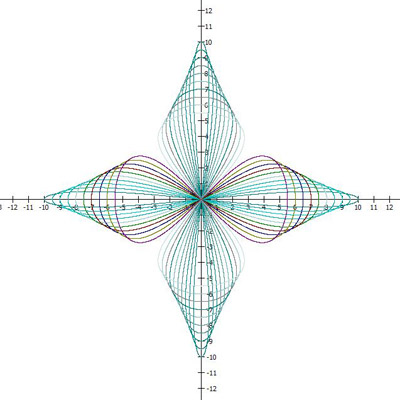
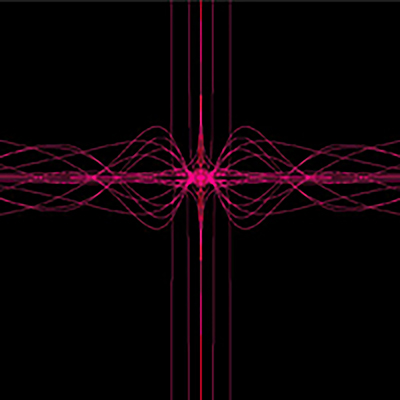
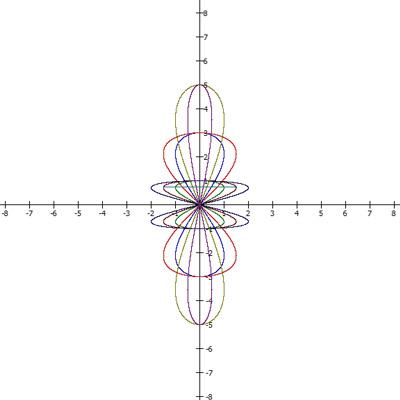
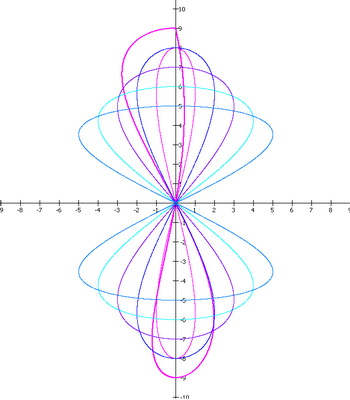
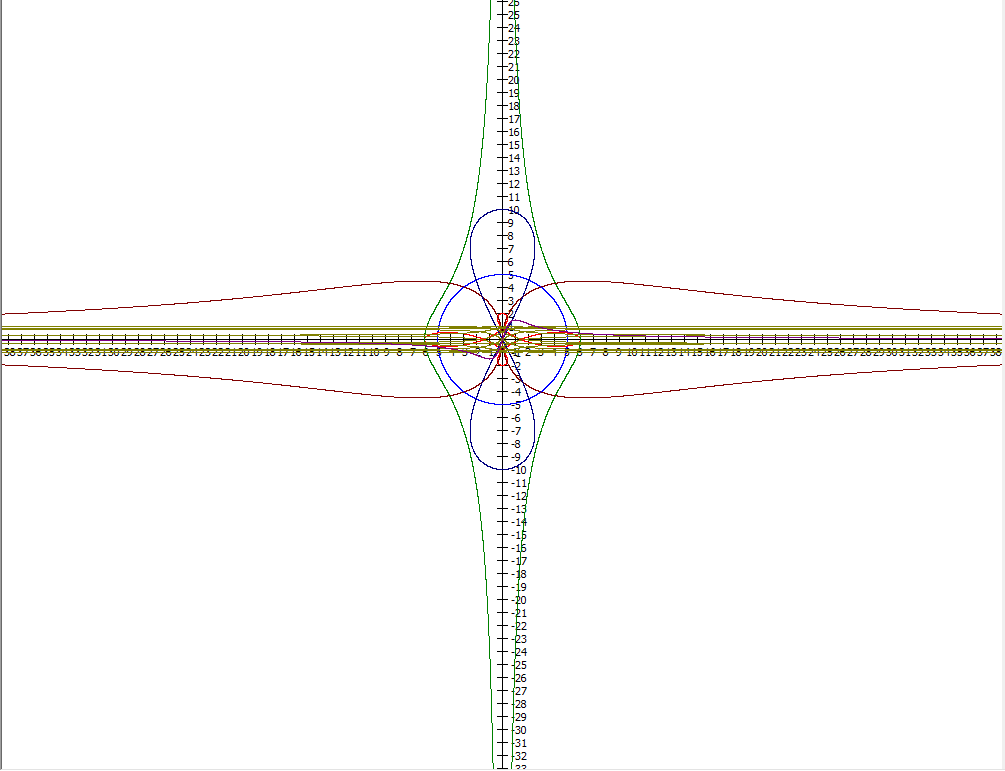
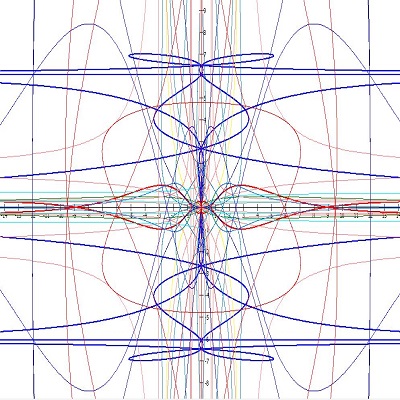
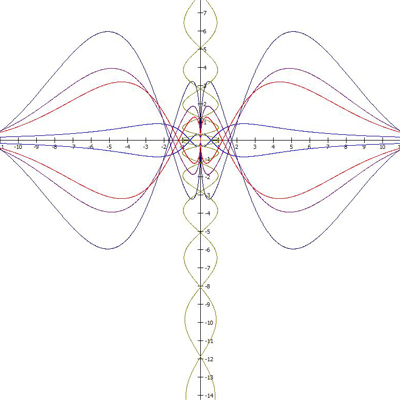
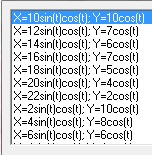
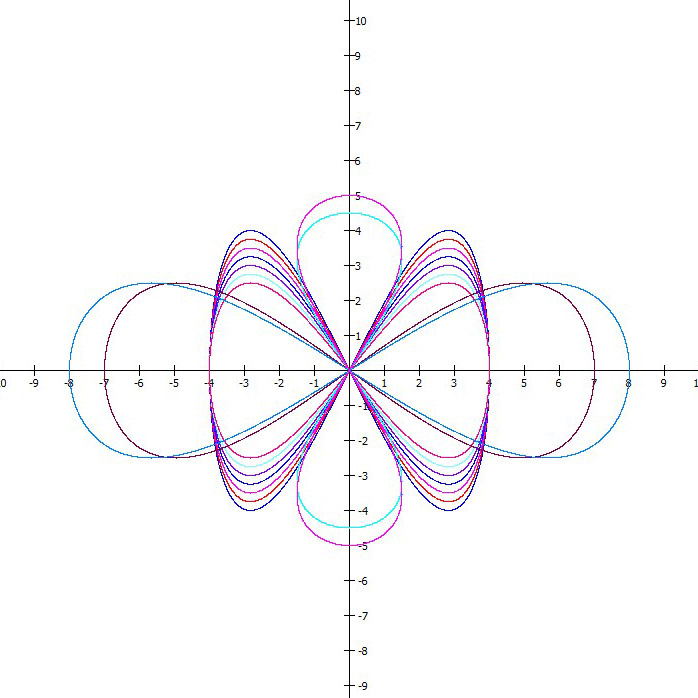
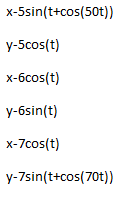
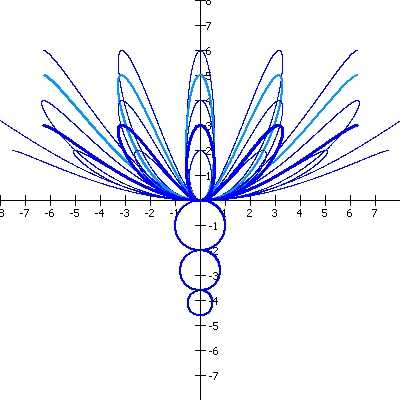
x=tsin(t)cos(t) y=9cos(t)
x=1.5sin(t)cos(t) y=8.5cos(t)
x=2sin(t)cos(t) y=8cos(t)
x=2.5sin(t)cos(t) y=7.5cos(t)
x=3sin(t)cos(t) y=7cos(t)
x=3.5sin(t)cos(t) y=6.5cos(t)
x=4sin(t)cos(t) y=6cos(t)
x=4.5sin(t)cos(t) y=5.5cos(t)
x=5sin(t)cos(t) y=5cos(t)
x=5.5sin(t)cos(t) y=4.5cos(t)
x=6sin(t)cos(t) y=4cos(t)
x=6.5sin(t)cos(t) y=3.5cos(t)
x=7sin(t)cos(t) y=3cos(t)
x=7.5sin(t)cos(t) y=2.5cos(t)
x=8sin(t)cos(t) y=2cos(t)
x=8.5sin(t)cos(t) y=1.5cos(t)
x=9sin(t)cos(t) y=cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
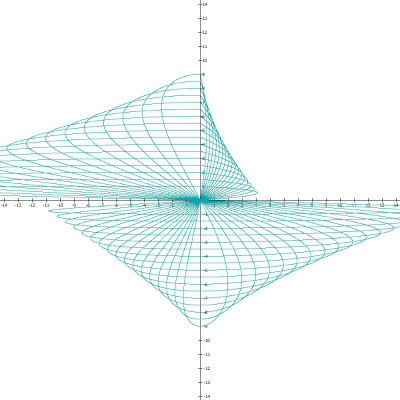
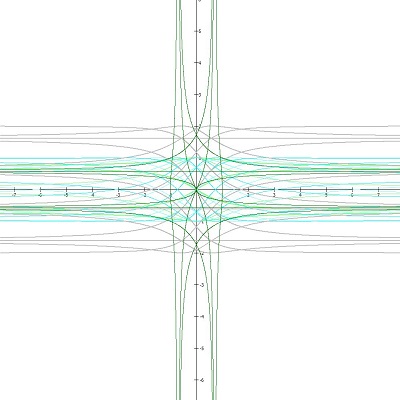
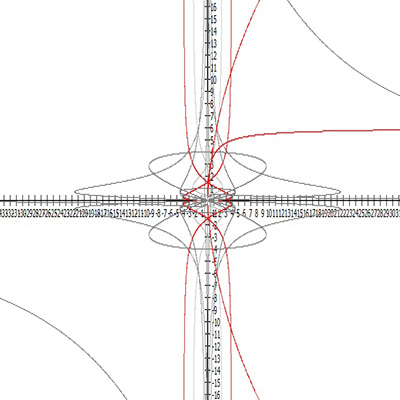
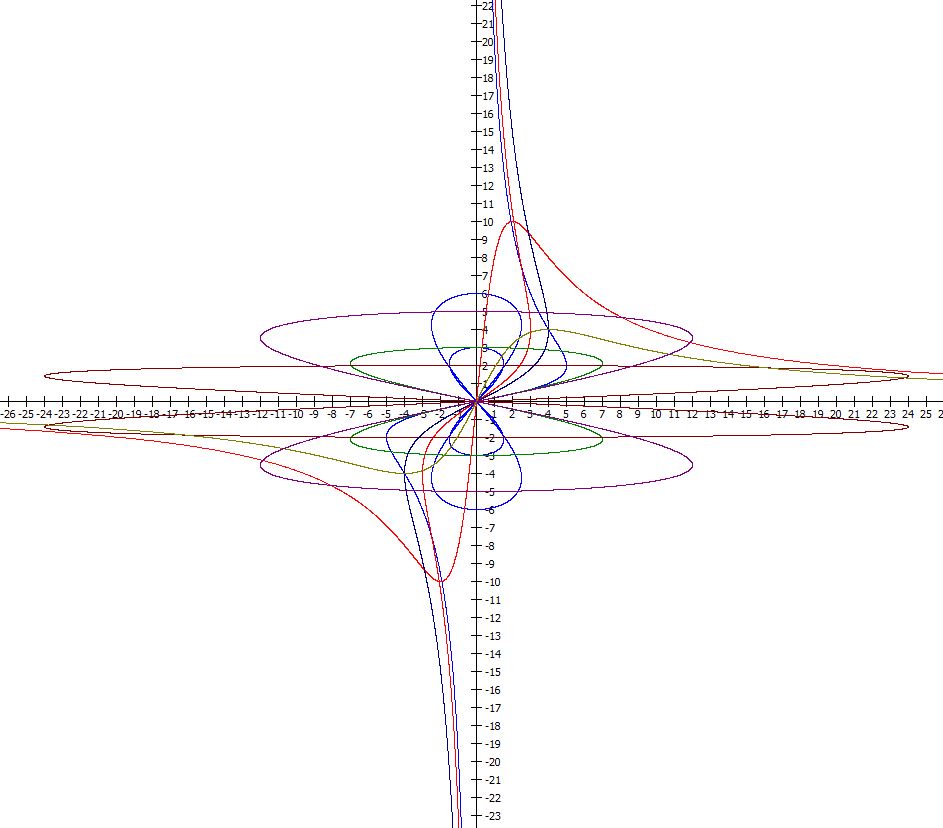
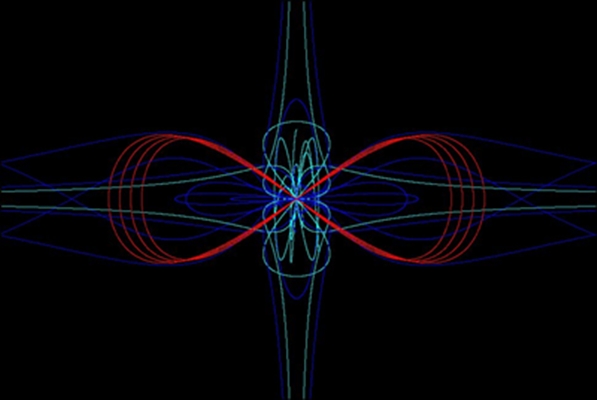
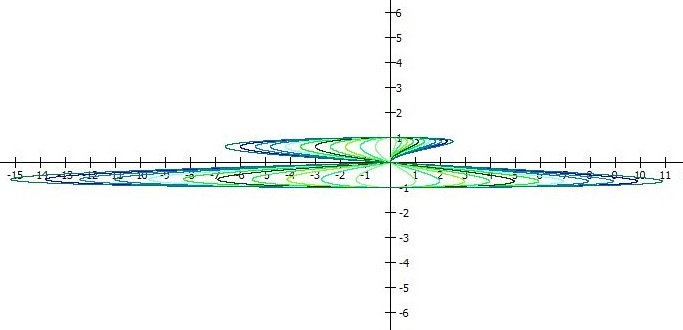
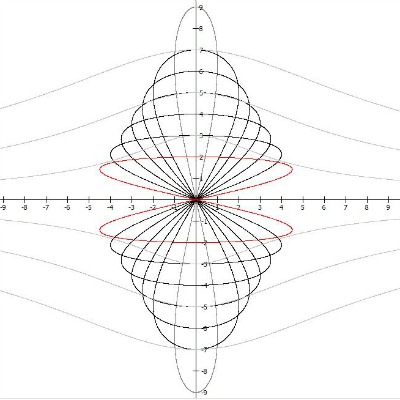
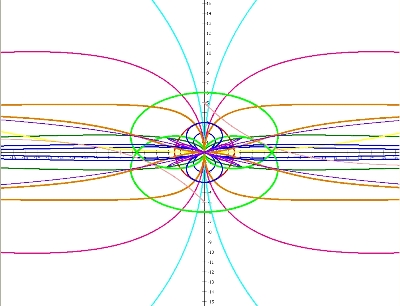
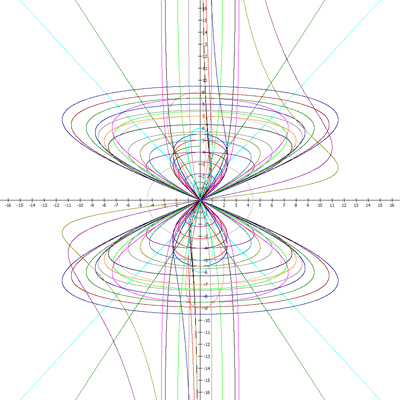
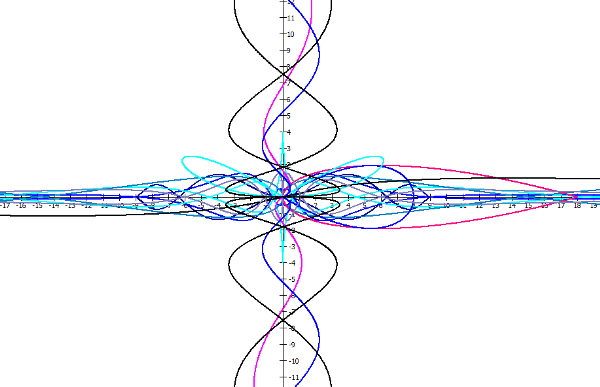
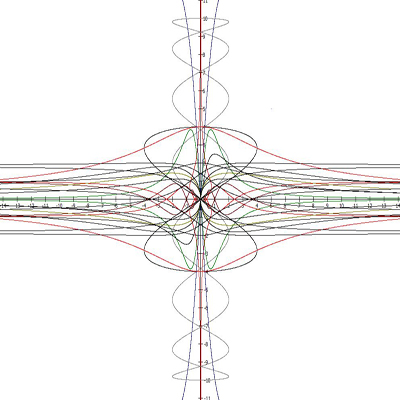
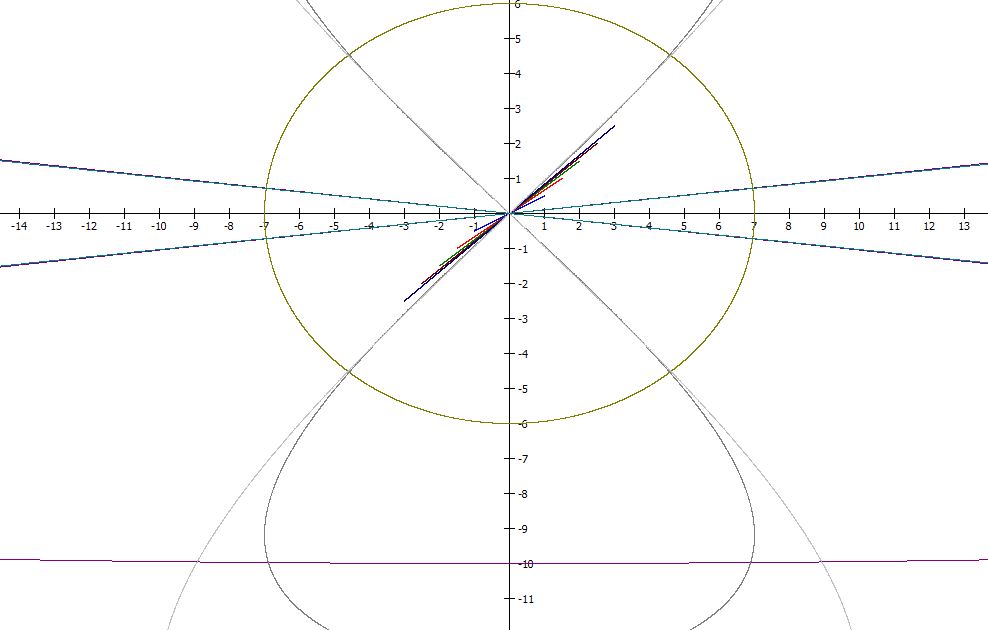
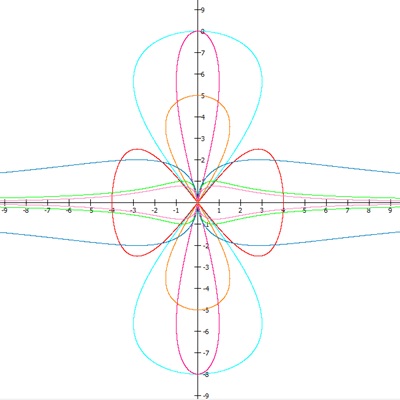
- X= 1sin(t)4cos(t); Y=9cos(t)
- X= 1.5sin(t)4cos(t); Y=8.5cos(t)
- X= 2sin(t)4cos(t); Y=8cos(t)
- X= 2.5sin(t)4cos(t); Y=7.5cos(t)
- X= 3sin(t)4cos(t); Y=7cos(t)
- X= 3.5sin(t)4cos(t); Y=6.5cos(t)
- X= 4sin(t)4cos(t); Y=6cos(t)
- X= 4.5sin(t)4cos(t); Y=5.5cos(t)
- X= 5sin(t)4cos(t); Y=5cos(t)
- X= 5.5sin(t)4cos(t); Y=4.5cos(t)
- X= 6sin(t)4cos(t); Y=4cos(t)
- X= 7sin(t)4cos(t); Y=3cos(t)
- X= 8sin(t)4cos(t); Y=2cos(t)
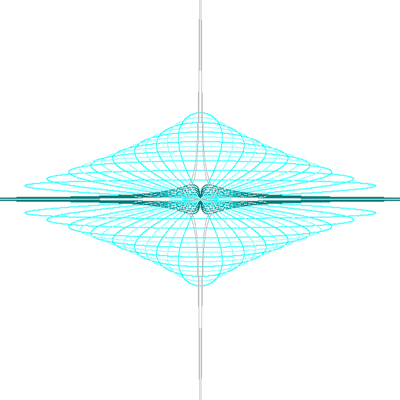
- X=tan(t)*sin(t); Y= cos(t)*sin(t)
- X=tan(t)*sin(t); Y= 1.5cos(t)*sin(t)
- X=tan(t)*sin(t); Y= 2cos(t)*sin(t)
- X=tan(t)*sin(t); Y= 2.5cos(t)*sin(t)
- X=tan(t)*sin(t); Y= cos(t)*sin(t)
- X=-3.5*sin(t)*cos(t); Y= 1/2*tan(t)
- X=3.5*sin(t)*cos(t); Y= 1/2*tan(t)
- X=-2.5*sin(t)*cos(t); Y= 1/2*tan(t)
- X=-2.5*sin(t)*cos(t); Y= 1/2*tan(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
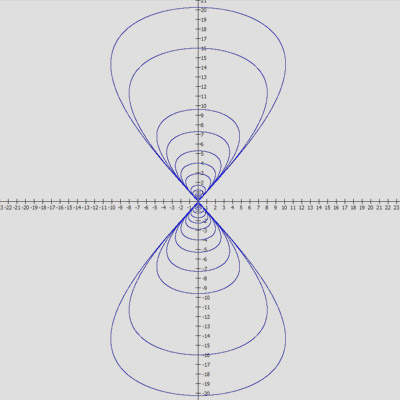
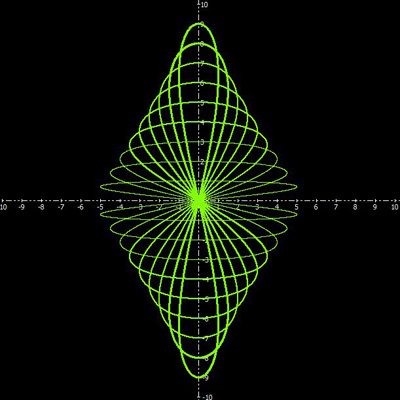
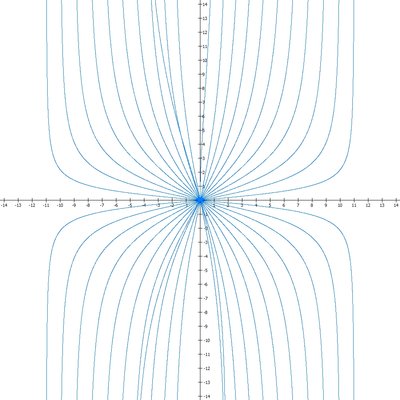
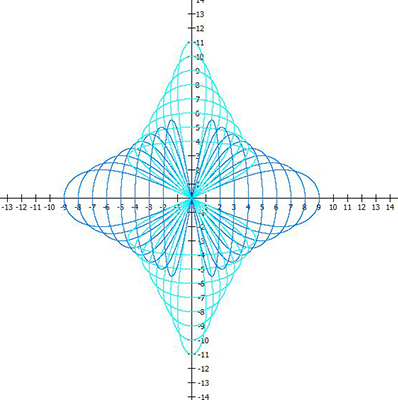
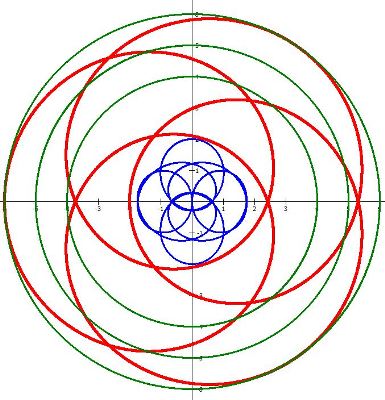
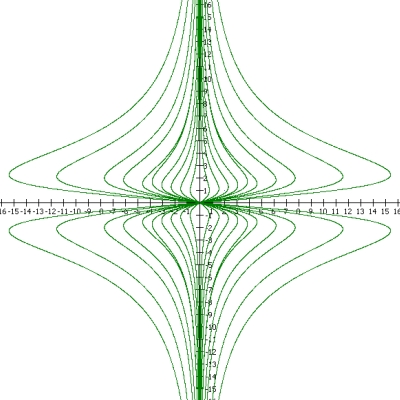
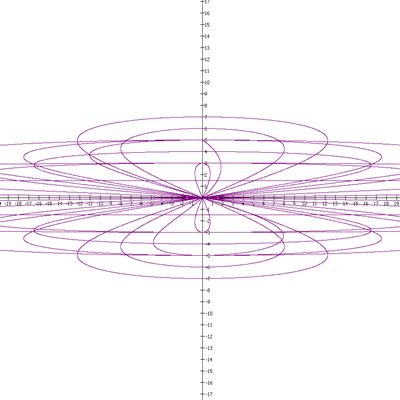
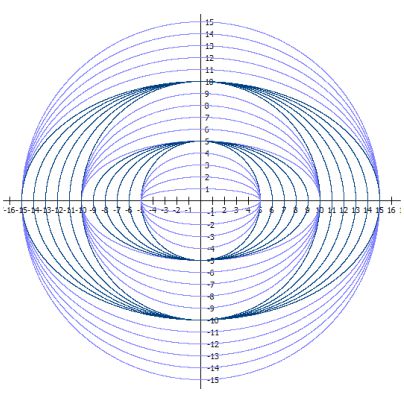
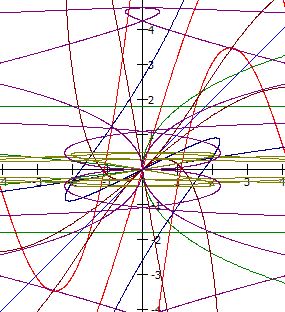
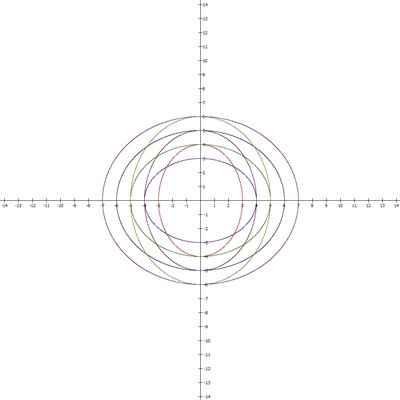
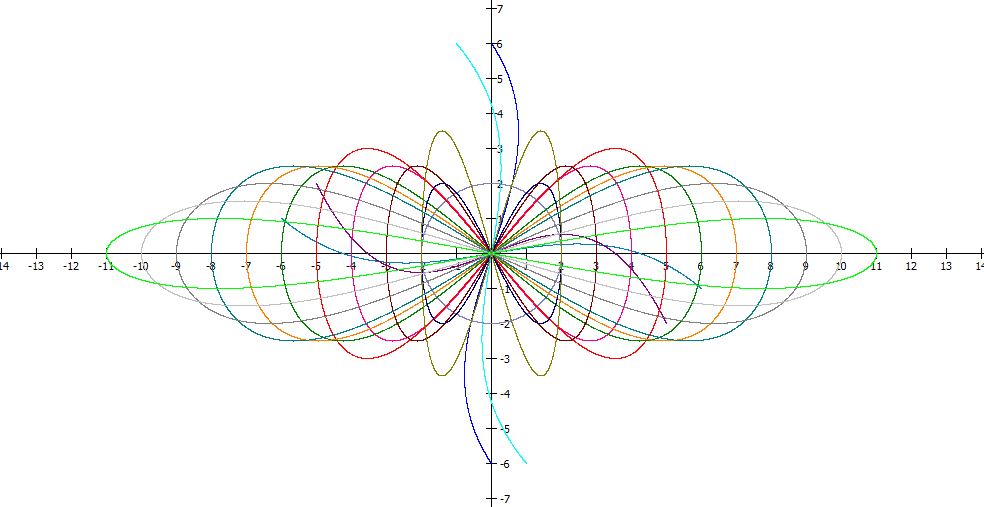
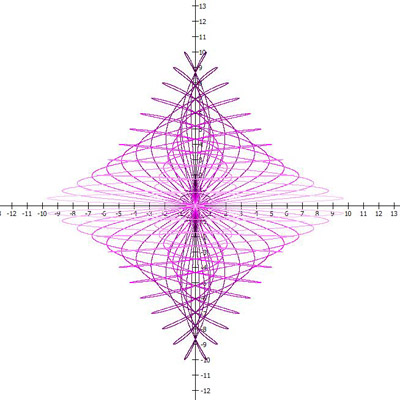
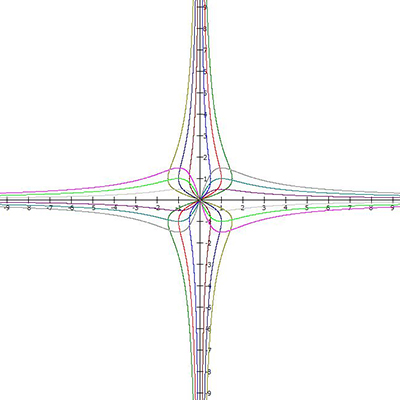
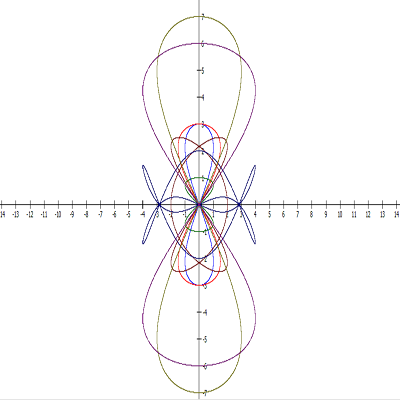
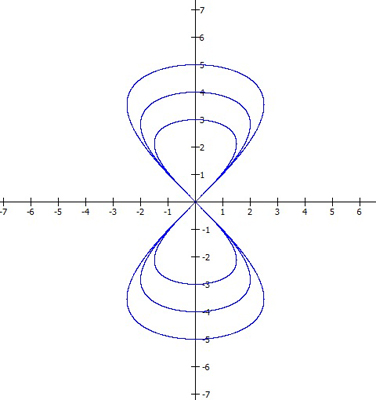
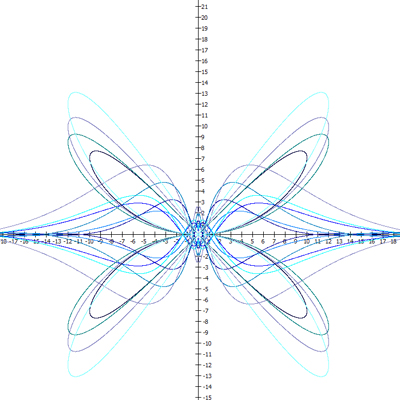
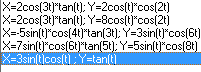
x=a*cos(t) y=b*sin(t)
0<=t=>2pi
1. a=3 b=3
2. a=3 b=4
3. a=3 b=5
4. a=3 b=6
5. a=6 b=6
6. a=8 b=6
7. a=10 b=6

Odgovor: Zadatak 01 - Krive u ravni
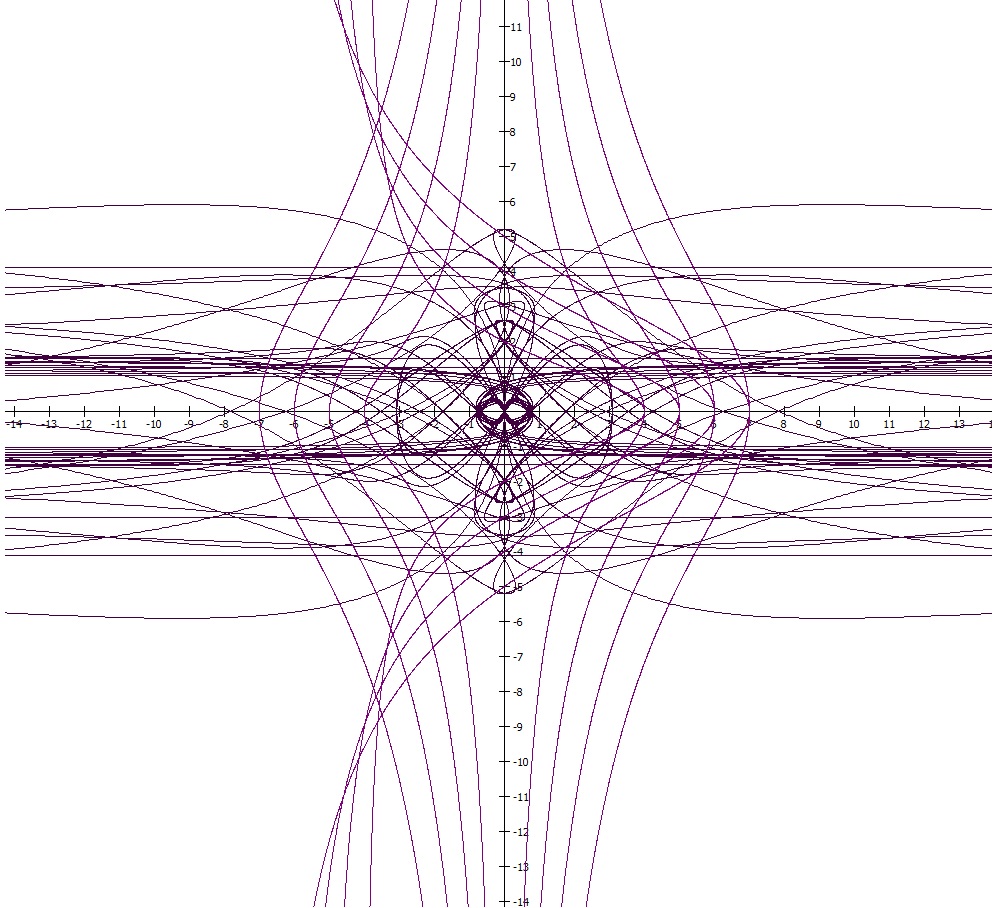
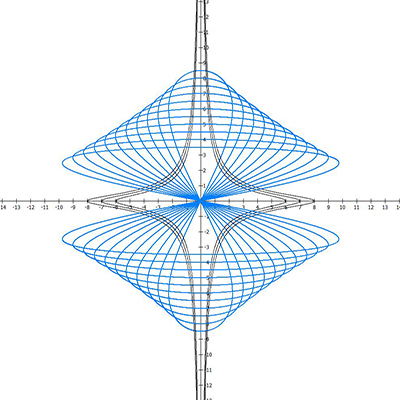
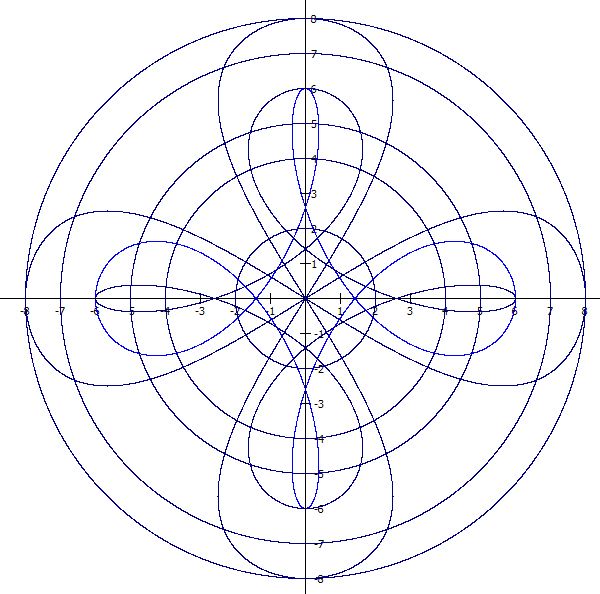
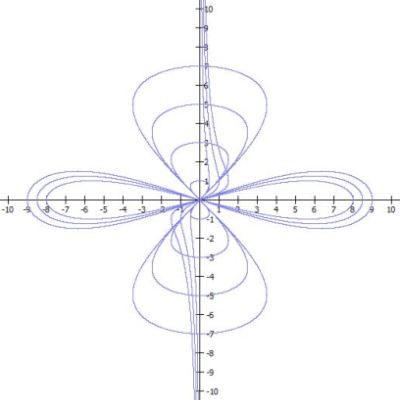
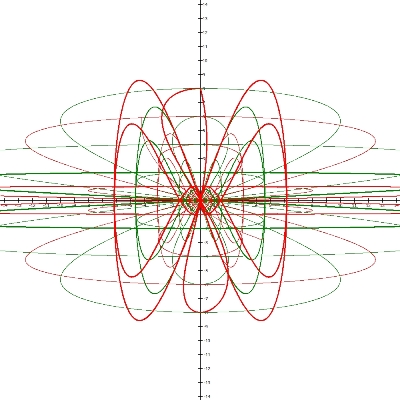
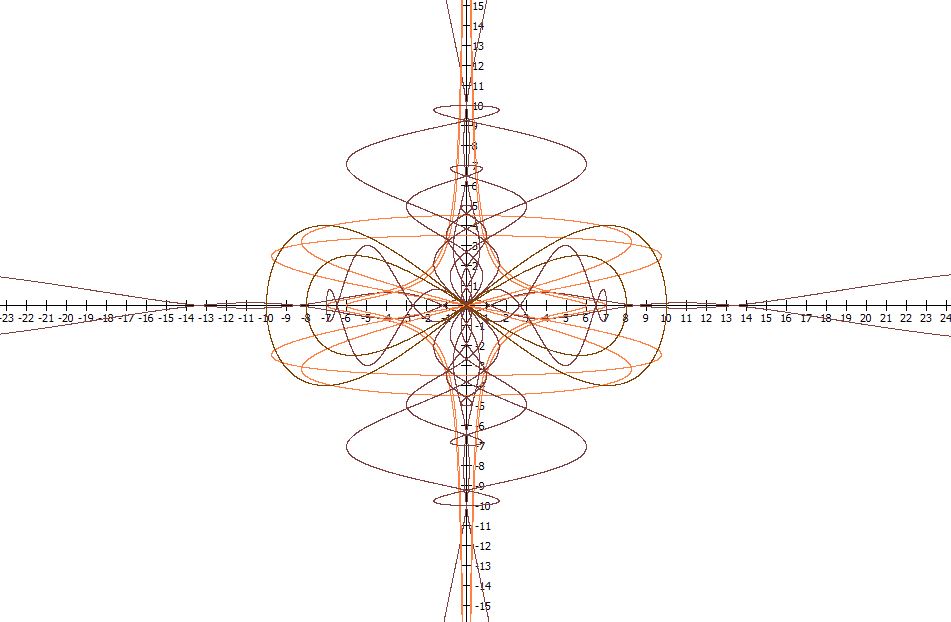
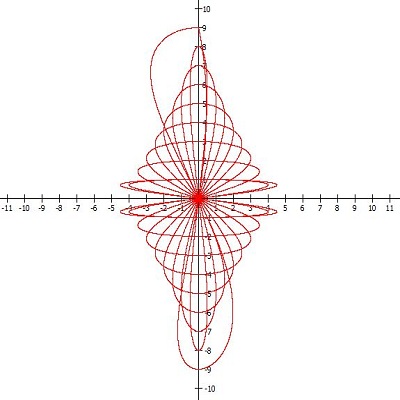
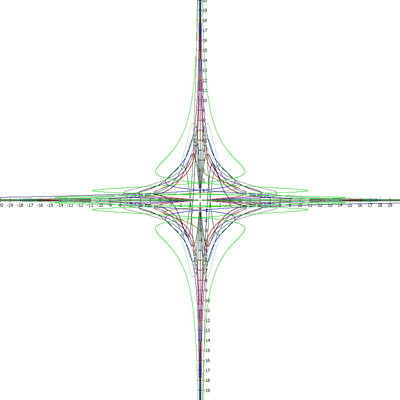
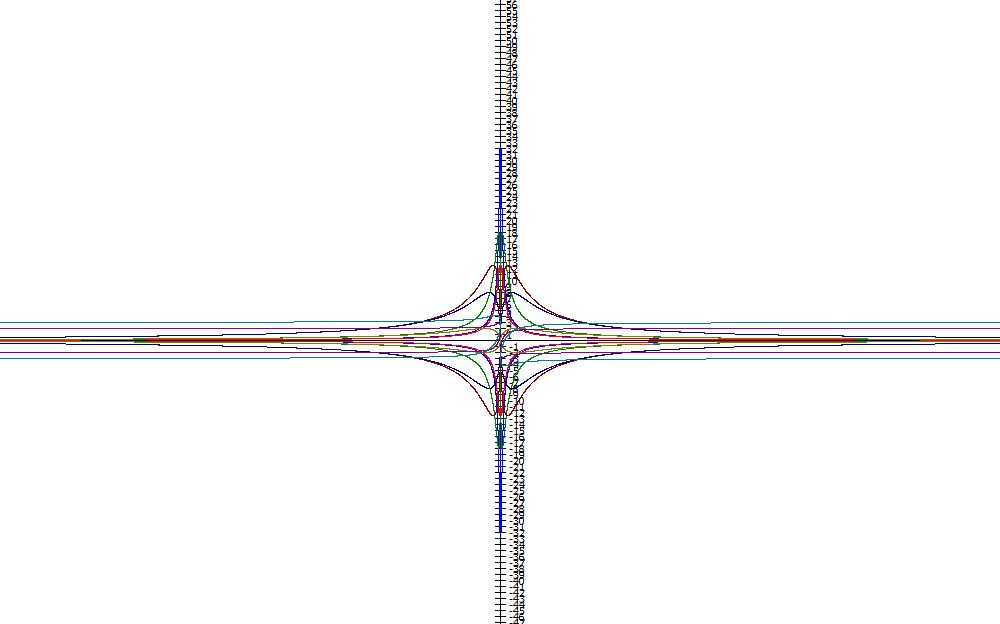
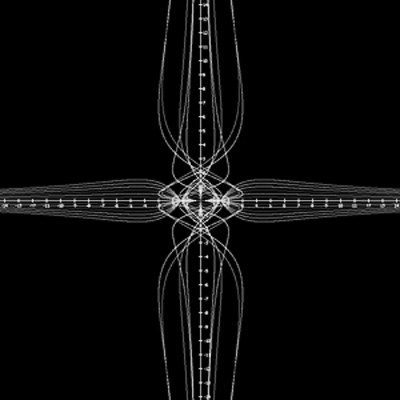
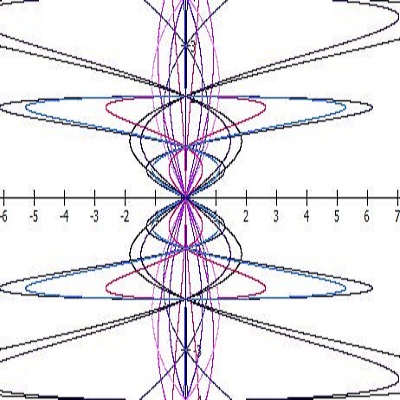
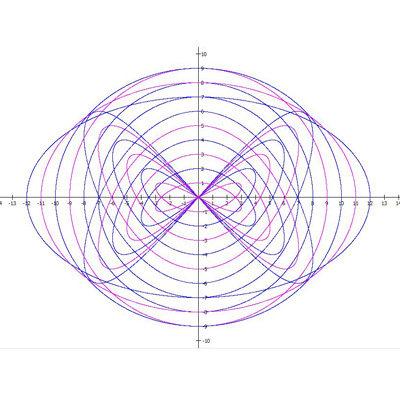
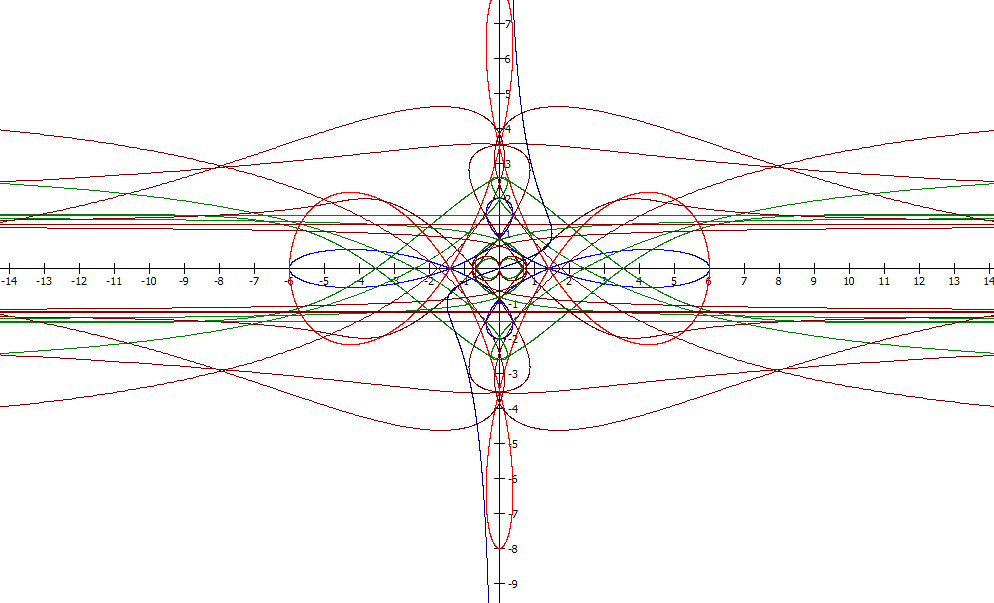
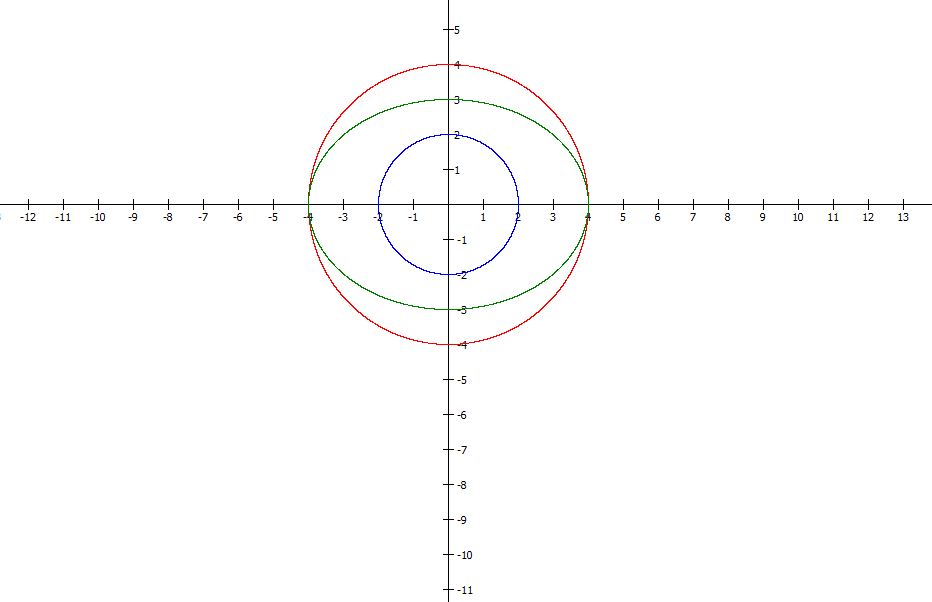
x=2cos(3t)*tan(t); y=2cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=3cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=4cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=5cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=6cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=7cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=8cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=9cos(t)*cos(2t)
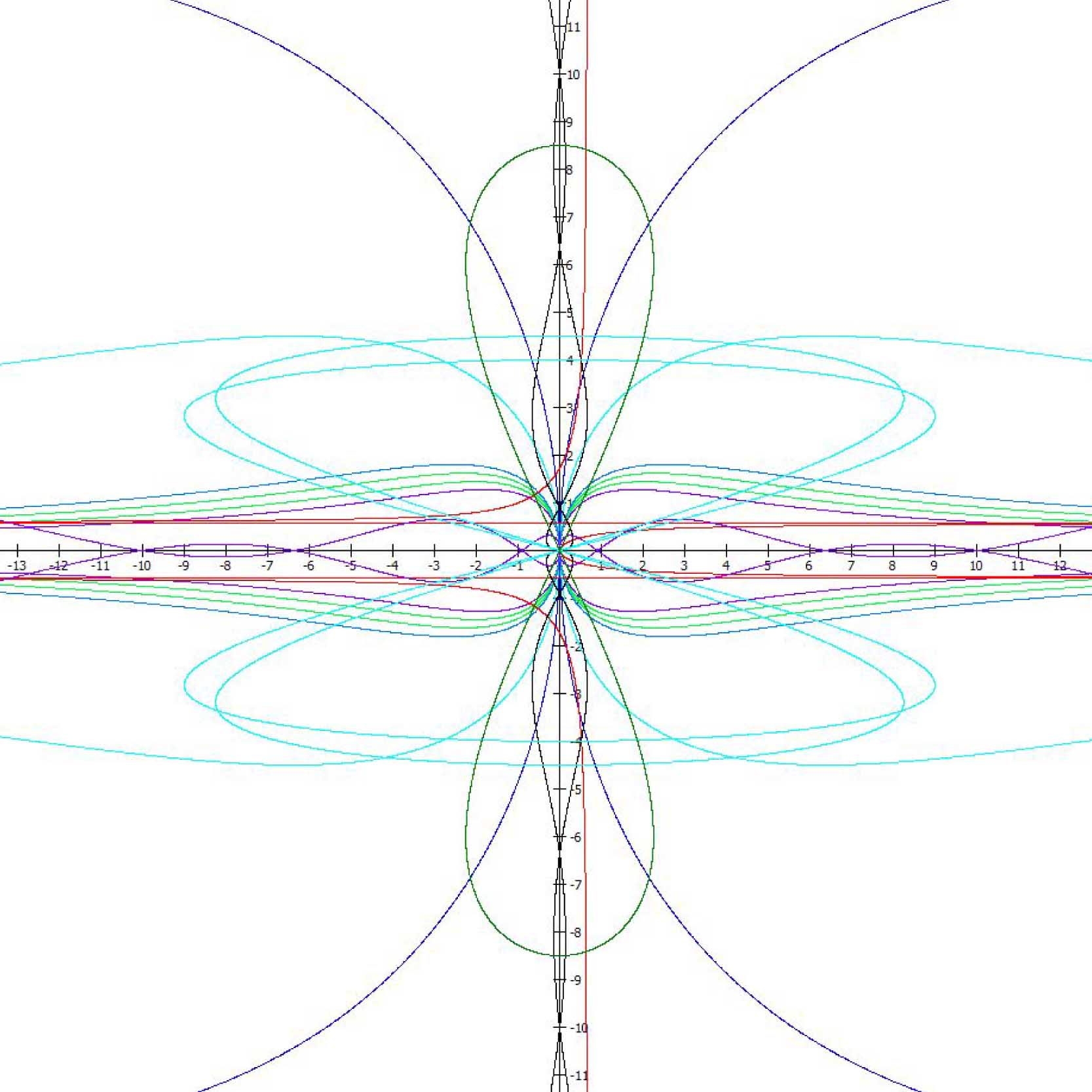
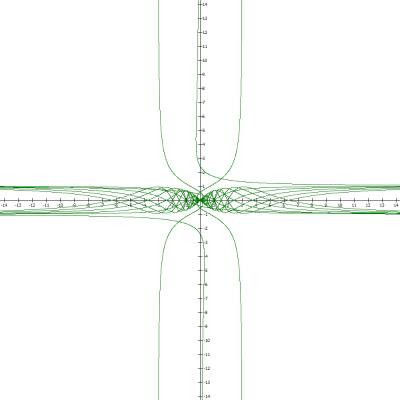
x=8sin(t)*cot(t); y=1/2tan(t)
x=8sin(t)*cot(t); y=tan(t)
x=8sin(t)*cot(t); y=3/2tan(t)
x=8sin(t)*cot(t); y=2tan(t)
x=8sin(t)*cot(t); y=5/2tan(t)
x=8sin(t)*cot(t); y=3tan(t)
x=8sin(t)*cot(t); y=7/2tan(t);
x=8sin(t)*cot(t); y=4tan(t)
x=8sin(t)*cot(t); y=9/2tan(t)
x=8sin(t)*cot(t); y=5tan(t)
x=8sin(t)*cot(t); y=11/2tan(t)
x=8sin(t)*cot(t); y=6tan(t)
granice parametra za sve f/je 0<= t <= 2pi
Odgovor: Zadatak 01 - Krive u ravni
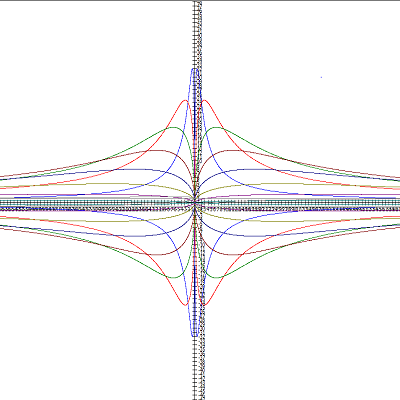
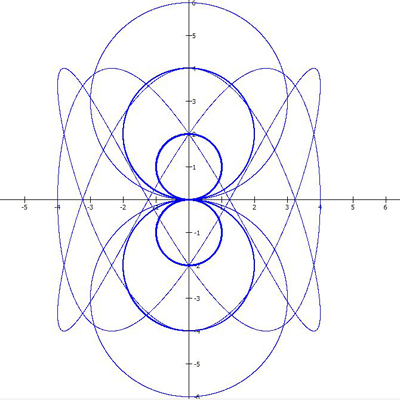
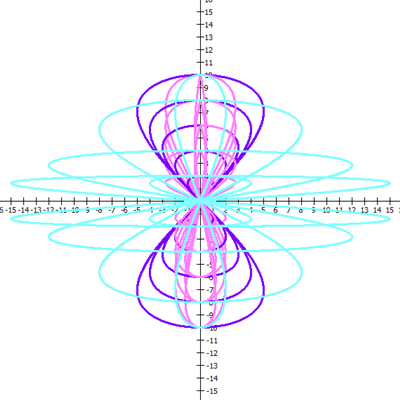
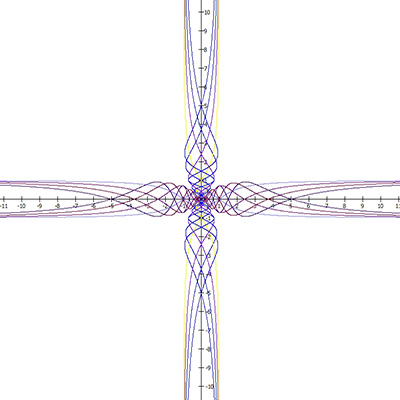
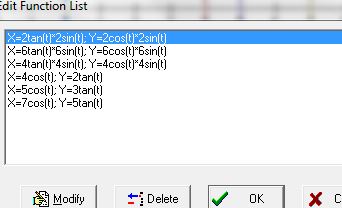
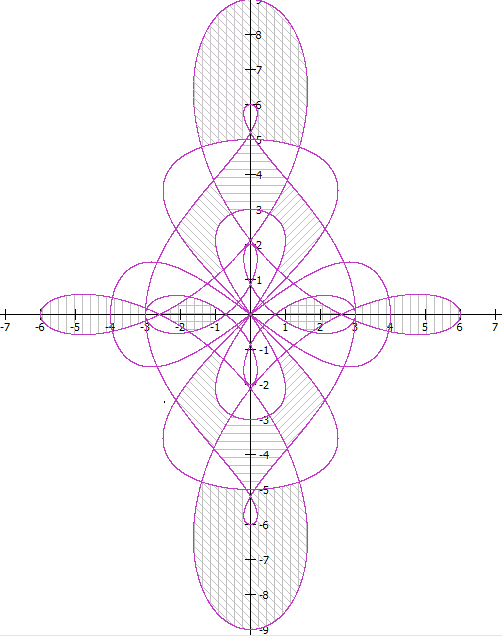
x=2tan(t)*2sin(t), y=2cos(t)*2sin(t);
x=4tan(t)*4sin(t), y=4cos(t)*4sin(t);
x=6tan(t)*6sin(t), y=6cos(t)*6sin(t);
x=1.9tan(t)*1.9sin(t), y=1.9cos(t)*1.9sin(t)
x=1.8tan(t)*2sin(t), y=1.8cos(t)*1.8sin(t);
x=1.7tan(t)*1.7sin(t), y=1.7cos(t)*1.7sin(t);
x=1.6tan(t)*1.6sin(t), y=1.6cos(t)*1.6sin(t);
x=1.5tan(t)*1.5sin(t), y=1.5cos(t)*1.5sin(t);
x=5.9tan(t)*5.9sin(t), y=5.9cos(t)*5.9sin(t);
x=5.8tan(t)*5.8sin(t), y=5.8cos(t)*5.8sin(t);
x=5.7tan(t)*5.7sin(t), y=5.7cos(t)*5.7sin(t);
x=5.6tan(t)*5.6sin(t), y=5.6cos(t)*5.6sin(t);
x=5.5tan(t)*5.5sin(t), y=5.5cos(t)*5.5sin(t);
x=1.9tan(t)*1.9sin(t), y=1.9cos(t)*1.9sin(t);
x=1.8tan(t)*1.8sin(t), y=1.8cos(t)*1.8sin(t);
x=1.7tan(t)*1.7sin(t), y=1.7cos(t)*1.7sin(t);
x=1.6tan(t)*1.6sin(t), y=1.6cos(t)*1.6sin(t);
x=1.5tan(t)*1.5sin(t), y=1.5cos(t)*1.5sin(t);
granica : 0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
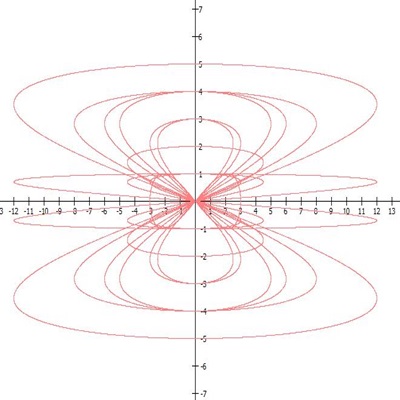
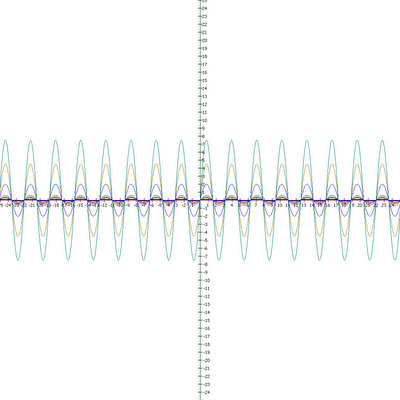
y=f(x)=cos(2x) y=f(x)=2cos(2x) y=f(x)=3cos(2x) y=f(x)=4cos(2x) y=f(x)=5cos(2x) y=f(x)=6cos(2x) y=f(x)=7cos(2x) y=f(x)=8cos(2x) y=f(x)=9cos(2x) y=f(x)=10cos(2x) y=f(x)=sin(2x) y=f(x)=2sin(2x) y=f(x)=3sin(2x) y=f(x)=4sin(2x) y=f(x)=5sin(2x) y=f(x)=6sin(2x) y=f(x)=7sin(2x) y=f(x)=8sin(2x) y=f(x)=9sin(2x)
Odgovor: Zadatak 01 - Krive u ravni
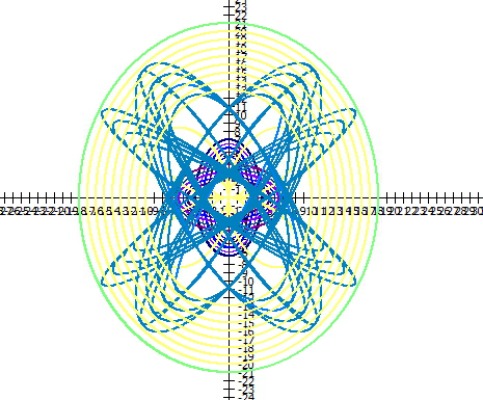
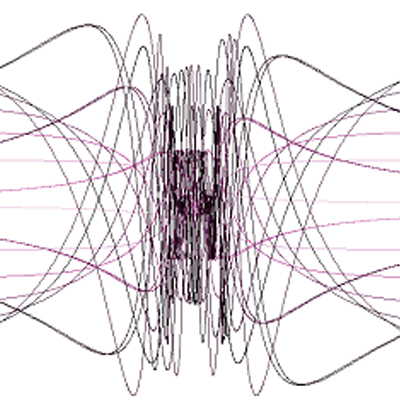
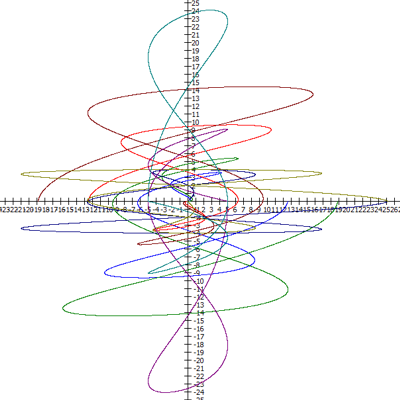
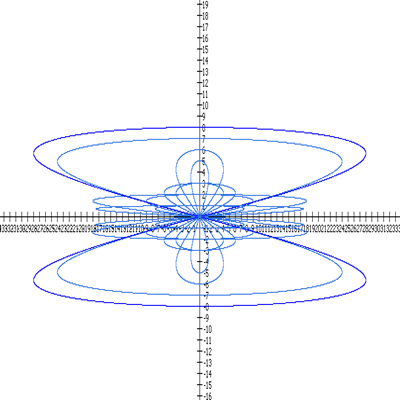
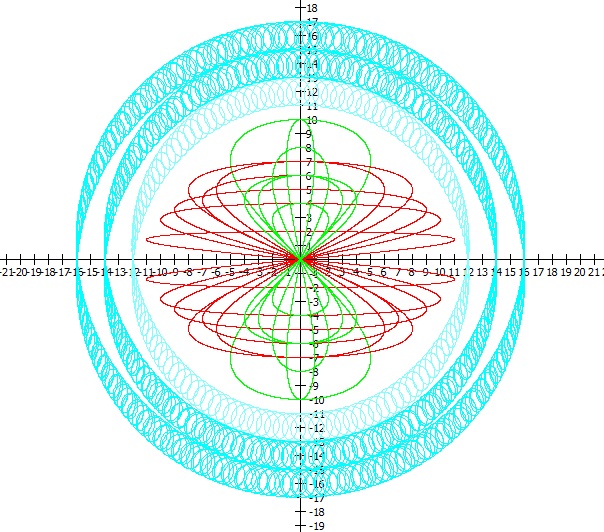
X=10cos(5t)+sin(5t)+5cos(2t)*sin(5t)+2tan(t) Y=5sin(2t)+3cos(t)+5cos(2t)*sin(5t)+2tan(t)
X=2cos(10t)+sin(5t)+cos(2t) Y=5cos(t)+10sin(2t)+sin(t)
X=cos(2t)*sin(2t) Y=5cos(t)*10sin(2t)
X=10arctan(t)*cos(5t) Y=sin(5t)*tan(2t)
X=10cos(t) Y=10sin(t)
X=9cos(t) Y=9sin(t)
X=8cos(t) Y=8sin(t)
X=7cos(t) Y=7sin(t)
X=6cos(t) Y=6sin(t)
X=11cos(t) Y=11sin(t)
X=12cos(t) Y=12sin(t)
X=13cos(t) Y=13sin(t)
X=14cos(t) Y=14sin(t)
X=15cos(t) Y=15sin(t)
X=16cos(t) Y=16sin(t)
X=17cos(t) Y=17sin(t)
X=18cos(t) Y=18sin(t)
Re: Zadatak 01 - Krive u ravni
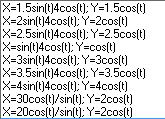
granice za t od 0 do 2Pi
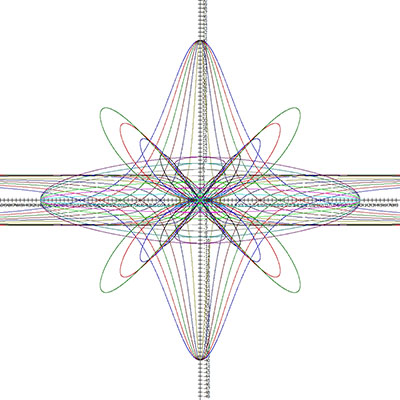
x=2sin(t)cos(t); y=8cos(t)
x=6sin(t)cos(t); y=4cos(t)
x=8sn(t)cos(t); y=2cos(t)
x=3cos(t); y=5sin(t)
x=6cos(t); y=6sin(t)
x=10cos(t); y=6sin(t)
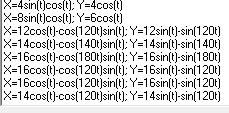
x=2cos(3t)tan(t); y=4cos(t)cos(2t)
Odgovor: Zadatak 01 - Krive u ravni
x=2cos(3t)*tan(t); y=2cos(t)*cos(2t)
x=2cos(3t)*tan(t); y=8cos(t)*cos(2t)
x=1.5tan(t)*1.5sin(t); y=1.5cos(t)*1.5sin(t)
x=2.5tan(t)*2.5sin(t); y=2.5coscos(t)*2.5sin(t)
x=1tan(t)*1sin(t); y=1.5cos(t)*1.5sin(t)
x=6tan(t)*6sin(t); y=6sin(t)*6cos(t)
x=28sin(t)*11cos(t); y=11tan(t)*28sin(t)
x=5.5tan(t)*5.5sin(t); y=5.5cos(t)*5.5sin(t)
x=4.5tan(t)*4.5sin(t); y=4.5cos(t)*4.5sin(t)
x=3.5tan(t)*3.5sin(t); y=3.5cos(t)*3.5sin(t)
x=2.5tan(t)*2.5sin(t); y=2.5cos(t)*2.5sin(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
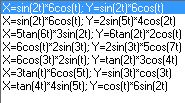
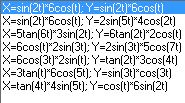
x=0.3sin(t)*0.3cos(t)_y=0.3cos(t)*0.3tan(t);
x=0.4sin(t)*0.4cos(t)_y=0.4cos(t)*0.4tan(t);
x=0.5sin(t)*0.5cos(t)_y=0.5cos(t)*0.5tan(t);
x=0.6sin(t)*0.6cos(t)_y=0.6cos(t)*0.6tan(t);
x=0.7sin(t)*0.7cos(t)_y=0.7cos(t)*0.7tan(t);
x=0.8sin(t)*0.8cos(t)_y=0.8cos(t)*0.8tan(t);
x=1.1sin(t)*1.1cos(t)_y=1.1cos(t)*1.1tan(t);
x=1.3sin(t)*1.3cos(t)_y=1.3cos(t)*1.3tan(t);
x=1.5sin(t)*1.5cos(t)_y=1.5cos(t)*1.5tan(t);
x=1.7sin(t)*1.7cos(t)_y=1.7cos(t)*1.7tan(t);
x=2sin(t)*2cos(t)_y=2cos(t)*2tan(t);
x=2.3sin(t)*2.3cos(t)_y=2.3cos(t)*2.3tan(t);
x=2.7sin(t)*2.7cos(t)_y=2.7cos(t)*2.7tan(t);
x=3.1sin(t)*3.1cos(t)_y=3.1cos(t)*3.1tan(t);
x=4sin(t)*4cos(t)_y=4cos(t)*4tan(t);
x=4.5sin(t)*4.5cos(t)_y=4.5cos(t)*4.5tan(t);
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=4sin(t)*cos(2t)*tan(2t) y=2sin(t)*cos(5t)
x=-4sin(t)*cos(2t)*tan(2t) y=2sin(t)*cos(5t)
x=5sin(t)*cos(4t)*tan(3t) y=3sin(t)*cos(6t)
x=-5sin(t)*cos(4t)*tan(3t) y=3sin(t)*cos(6t)
x=6sin(t)*cos(5t)*tan(4t) y=4sin(t)*cos(7t)
x=-6sin(t)*cos(5t)*tan(4t) y=4sin*cos(7t)
x=7sin(t)*cos(6t)*tan(5t) y=5sin(t)*cos(8t)
x=-7sin(t)*cos(6t)*tan(5t) y=5sin(t)*cos(8t)
x=8sin(t)*cos(7t)*tan(6t) y=6sin(t)*cos(9t)
x=4cos(t) y=2tan(t)
x=5cos(t) y=3tan(t)
x=6cos(t) y=4tan(t)
x=7cos(t) y=5tan(t)
x=4cos(2t) y=2tan(t)
x=5cos(2t) y=3tan(t)
x=6cos(2t) y=4tan(t)
x=7cos(2t) y=5tan(t)
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)sin(t) y=8cos(t)8sin(t)
x=2tan(t)2sin(t) y=7cos(t)7sin(t)
x=3tan(t)3sin(t) y=6cos(t)6sin(t)
x=4tan(t)4sin(t) y=5cos(t)5sin(t)
x=5tan(t)5sin(t) y=4cos(t)4sin(t)
x=6tan(t)6sin(t) y=3cos(t)3sin(t)
x=7tan(t)7sin(t) y=2cos(t)2sin(t)
x=8tan(t)8sin(t) y=cos(t)sin(t)
x=9tan(t)9sin(t) y=-cos(t)-sin(t)
-1<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=sin(t)cos(t) y=8cos(t)
x=2sin(t)cos(t) y=9cos(t)
x=5sin(t)cos(t) y=12cos(t)
x=3sin(t)cos(t) y=10cos(t)
x=0.5sin(t)cos(t) y=3.5cos(t)
x=2.5sin(t)cos(t) y=3.5cos(t)
x=8.5sin(t)cos(t) y=cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=tan(3T)
y=sin(20T)
x=3*tan(2T)
y=2*sin(6T)
x=1,7*tan(2T)
y=4*sin(2T)
x=3*tan(T)
y=sin(T)
x=tan(5T)
y=4*sin(3T)
0 <= T <= 2pi
Odgovor: Zadatak 01 - Krive u ravni
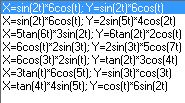
X=sin(2t)*6cos(t); Y=tan(t)
X=sin(2t)*6cos(t); Y=tan(t)
X=tan(T);Y=sin(2t)*6cos(t)
X=sin(2t)*3cos(t);Y=-tan(T)
X=-tan(t);Y=sin(2t)*3cos(t)
X=sin(2t)*8cos(t);Y=tan(t)
X=-tan(t);Y=sin(2t)*8cos(t)
X=sin(2t)*4cos(t);Y=-tan(t)
X=sin(2t)*10cos(t);Y=tan(t)
X=tan(t);Y=sin(2t)*6cos(t)
X=sin(2t)*20cos(t);Y=tan(t)
X=tan(T);Y=sin(2t)*20cos(t)
X=sin(2t)*cos(t);Y=3tan(t)
X=3tan(t);Y=sin(2t)*cos(t)
Odgovor: Zadatak 01 - Krive u ravni
ZADATAK 01_Krive u ravni // Milanović Mirko 081/2013
X=tan(t)*sin(t); Y=1,1sin(3t)
X=2tcos(3t); Y=2tsin(t)
X=tan(t)*sin(t); Y=1,7sin(3t)
X=tan(t)*sin(t); Y=1,9sin(3t)
X=1,9sin(3t); Y=tan(t)*sin(t)
X=2,1sin(3t); Y=tan(t)*sin(t)
X=2,4sin(3t); Y=tan(t)*sin(t)
X=3,6sin(3t); Y=tan(t)*sin(t)
Odgovor: Zadatak 01 - Krive u ravni
X=t*sin(2t)*cos(3t)
Y=t*cos(2t)*sin(3t)
X=t*sin(4t)*cos(6t)
Y=t*cos(4t)*sin(6t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=2sin(t)*cos(t) Y=9sin(t)
X=3sin(t)*cos(t) Y=8sin(t)
X=4sin(t)*cos(t) Y=7sin(t)
X=5sin(t)*cos(t) Y=6sin(t)
X=6sin(t)*cos(t) Y=5sin(t)
X=7sin(t)*cos(t) Y=4sin(t)
X=8sin(t)*cos(t) Y=3sin(t)
X=9sin(t)*cos(t) Y=2sin(t)
X=10sin(t)*cos(t) Y=sin(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=3tan(t) y=3cos(t)
x=5tan(t) y=5cos(t)
x=7tan(t) y=7cos(t)
x=4tan(t) y=4cos(t)
x=6tan(t) y=6cos(t)
x=2cos(t) y=2tan(t)
x=3cos(t) y=3tan(t)
x=4cos(t) y=4tan(t)
x=5cos(t) y=5tan(t)
Zadatak_KRIVE U RAVNI
x=tan(t) y=sin(2t)
x=5tan(t) y=sin(2t)
x=tan(t) y=5sin(2t)
x=tan(t) y=10sin(2t)
x=5sin(2t) y=2tan(t)
x=10sin(2t) y=2tan(t)
x=10sin(t)*10cos(2t) y=10cos(t)*2tan(t)
x=sin(2t)*cos(t) y=tan(t)*cos(2t)
x=sin(2t)*2cos(t) y=tan(t)*cos(2t)
x=sin(2t)*5cos(t) y=tan(t)*cos(2t)
x=sin(2t)*cos(t) y=tan(t)*2cos(2t)
x=sin(2t)*3cos(t) y=tan(t)*cos(2t)
x=sin)2t)*4cos(t) y=tan(t)*cos(2t)
x=cos(t)*sin(2t) y=2tan)t)&2cos(2t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=cos(t)sin(t); Y=sin(t)
X=sin(t)sin(t)sin(t); Y=sint(t)
X=cos(2t)cos(2t); Y=sin(t)
X=-cos(2t)cos(2t); Y=sin(t)
X=-sin(t)sin(t)sin(t); Y=sin(t)
X=cos(4t)cos(4t); Y=sin(2t)
X=tan(t)cos(t); Y=tan(2t)
X=-tan(t)cos(t); Y=tan(t)
X=tan(3t)sin(2t); Y=-tan(t)
X=-tan(3t)sin(2t); Y=tan(t)
X=-tan(t)cos(t); Y=tan(t)
X=tan(3t)sin(2t); Y=-tan(t)
X=-tan(3t)sin(2t); Y=tan(t)
X=sin(8t)sin(t)cos(2t); Y=cos(2t)
X=-sin(8t)sin(t)cos(2t); Y=sin(2t)
X=-tan(3t)sin(t)cos(t); Y=-sin(3t)cos(2t)
X=tan(3t)sin(t)cos(t); Y=sin(3t)cos(2t)
X=2sin(2t)cos(3t); Y=4sin(t)sin(2t)
Odgovor: Zadatak 01 - Krive u ravni
X=tan(2t); Y=cos(2t)
X=tan(2t); Y=-cos(t)
X=2tan(4t); Y=sin(5t)
X=-tan(4t); Y=-sin(5t)
X=tan(5t); Y=2sin(3t)
X=tan(t)cos(t); Y=tan(2t)
X=-tan(3t)sin(2t); Y=tan(t)
X=tan(3t)sin(2t); Y=-tan(t)
Odgovor: Zadatak 01 - Krive u ravni
x=tcos(t)tan(t) y=11tan(t)
x=2cos(t)tan(t) y=10tan(t)
x=3cos(t)tan(t) y=9tan(t)
x=4cos(t)tan(t) y=8tan(t)
x=5cos(t)tan(t) y=7tan(t)
x=6cos(t)tan(t) y=6tan(t)
x=7cos(t)tan(t) y=5tan(t)
x=8cos(t)tan(t) y=4tan(t)
x=9cos(t)tan(t) y=3tan(t)
x=10cos(t)tan(t) y=2tan(t)
x=11cos(t)tan(t) y=1tan(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
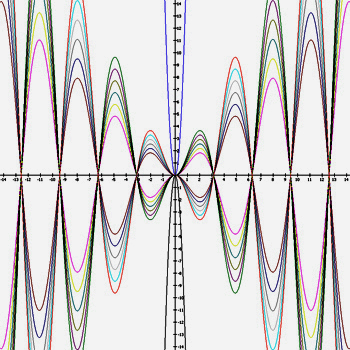
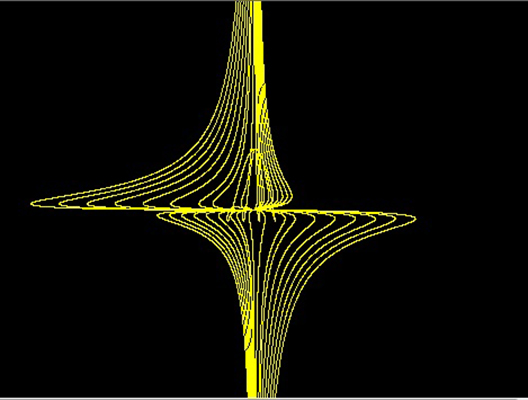
x=1.5sin(t)3cos(t)
y=8.5cos(t)
x=2sin(t)3cos(t)
y=8cos(t)
x=2.5sin(t)3cos(t)
y=7.5cos(t)
x=3sin(t)3cos(t)
y=7cos(t)
x=3.5sin(t)3cos(t)
y=6.5cos(t)
x=4sin(t)3cos(t)
y=6cos(t)
x=4.5sin(t)3cos(t)
y=5.5cos(t)
x=5sin(t)3cos(t)
y=5cos(t)
x=5.5sin(t)3cos(t)
y=4.5cos(t)
x=6sin(t)3cos(t)
y=4cos(t)
x=6.5sin(t)3cos(t)
y=3.5cos(t)
x=8sin(t)*cot(t)
y=1/2tan(t)
x=7sin(t)*cot(t)
y=1/2tan(t)
x=6sin(t)*cot(t)
y=1/2tan(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=6.5sin(t)cos(t) y=3.5cos(t)
x=6sin(t)cos(t) y=3.5cos(t)
x=5.5sin(t)cos(t) y=3.5cos(t)
x=5sin(t)cos(t) y=3.5cos(t)
x=4.5sin(t)cos(t) y=3.5cos(t)
x=4sin(t)cos(t) y=3.5cos(t)
x=3.5sin(t)cos(t) y=3.5cos(t)
x=3.5sin(t)cos(t) y=6.5cos(t)
x=3sin(t)cos(t) y=6.5cos(t)
x=6.5sin(t) y=3.5sin(t)cos(t)
x=6sin(t) y=3.5sin(t)cos(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=5cos(t); y=2sin(t)*1cos(t)
x=3cos(t)*4sin(t); y=4cos(t)
x=3cos(t)*2sin(t); y=2cos(t)
x=2cos(t)*4sin(t); y=3cos(t)
x=2cos(t)*3sin(t); y=3cos(t)
x=3cos(t)*3sin(t); y=4cos(t)
x=5cos(t)*3sin(t); y=5cos(t)
x=6cos(t); y=3sin(t)*cos(t)
x=4cos(t)*4sin(t); y=5.3cos(t)
x=3cos(t); y=sin(t)*cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2cos(3t)*tan(t); y=3cos(t)*2cos(2t)
x=3cos(3t)*tan(t); y=3cos(t)*2cos(2t)
x=4cos(3t)*tan(t); y=3cos(t)*2cos(2t)
x=3cos(t)*2cos(2t); y=2cos(3t)*tan(t)
x=3cos(t)*2cos(2t); y=3cos(3t)*tan(t)
x=3cos(t)*2cos(2t); y=4cos(3t)*tan(t)
x=3cos(2t)*sin(t)*cos(5t); y=3tan(t)*3sin(t)
x=5cos(2t)*sin(t)*cos(5t); y=3tan(t)*3sin(t)
x=7cos(2t)*sin(t)*cos(5t); y=3tan(t)*3sin(t)
x=3tan(t)*4sin(t); y=3cos(2t)*sin(t)*cos(5t)
x=3tan(t)*3sin(t); y=3cos(2t)*sin(t)*cos(5t)
x=3tan(t)*2sin(t); y=3cos(2t)*sin(t)*cos(5t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
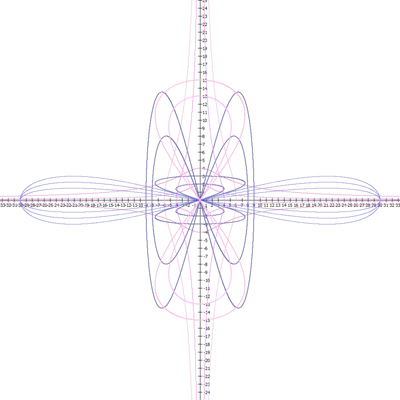
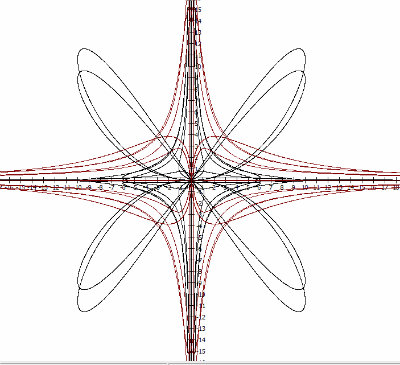
f1: X= (14-1)*cos(t)-18*cos( (14+1)*t /1 )
Y=(14-1)*sin(t)-18*sin( (14+1)*t / 1 )
f2: X=(14-1)*cos(t)-18*cos( (14+1)*t /2 )
Y=(14-1)*sin(t)-18*sin( (14+1)*t / 2 )
f3: X=(14-1)*cos(t)-18*cos( (14+1)*t /3 )
Y=(14-1)*sin(t)-18*sin( (14+1)*t / 3 )
f4: X=(14-1)*cos(t)-18*cos( (14+1)*t /4 )
Y=(14-1)*sin(t)-18*sin( (14+1)*t / 4 )
f5: X=(14-1)*cos(t)-18*cos( (14+1)*t /5 )
Y=(14-1)*sin(t)-18*sin( (14+1)*t / 5 )
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=1cos(3t)*tan(t) y=2cos(t)*1cos(2t)
x=7sin(t)1cos(t) y=7cos(t)
x=3sin(t)1cos(t) y=3cos(t)
x=5sin(t)1cos(t) y=5cos(t)
x=8cos(t) y=8cos(t)
x=4sin(t)1cos(t) y=4cos(t)
x=6sin(t)1cos(t) y=6cos(t)
x=8sin(t)1cos(t) y=8cos(t)
x=6,5sin(t)1cos(t) y=6,5cos(t)
x=7,5sin(t)1cos(t) y=7,5cos(t)
x=5,5sin(t)1cos(t) y=5,5cos(t)
x=4,5sin(t)1cos(t) y=4,5cos(t)
x=3,5sin(t)1cos(t) y=3,5cos(t)
x=2,5sin(t)1cos(t) y=2,5cos(t)
x=6sin(t) y=3,5sin(t)cos(t)
x=5,5sin(t) y=3,5sin(t)cos(t)
x=5sin(t) y= 3,5sin(t)cos(t)
x=4,5sin(t) y=3,5sin(t)cos(t)
x=4sin(t) y=3,5sin(t)cos(t)
x=3,5sin(t) y=3,5sin(t)cos(t)
x=3cos(t)*2cos(2t) y=3cos(3t)*tan(t)
x=2sin(t)*cos(t) y=4sin(t)
x=2sin(t)*cos(t) y=3,5sin(t)
x=2sin(t)*cos(t) y=3sin(t)
x=2sin(t)*cos(t) y=4,5sin(t)
x=2sin(t)*cos(t) y=5sin(t)
0<=<=2pi
Odgovor: Zadatak 01 - Krive u ravni
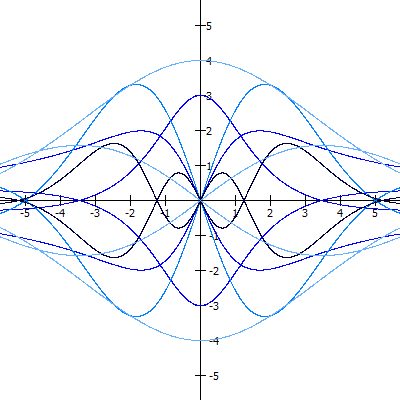
x=tan(t)*sin(t) y=cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=2cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=4cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=6cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=8cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=10cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=12cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=14cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=16cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=18cos(t)*sin(t) 0<t<2pi
x=tan(t)*sin(t) y=20cos(t)*sin(t) 0<t<2pi
Odgovor: Zadatak 01 - Krive u ravni
1.X =1sin(2t)*1cos(4t); Y=9sin(t);0<=T<=pi
2.X =2sin(2t)*1cos(4t); Y=8sin(t);0<=T<=pi
3.X =3sin(2t)*1cos(4t); Y=7sin(t);0<=T<=pi
4.X =4sin(2t)*1cos(4t); Y=6sin(t);0<=T<=pi
5.X =5sin(2t)*1cos(4t); Y=5sin(t);0<=T<=pi
6.X =6sin(2t)*1cos(4t); Y=4sin(t);0<=T<=pi
7.X =9sin(t); Y=1sin(2t)*1cos(4t);0<=T<=pi
8.X =8sin(t); Y=2sin(2t)*1cos(4t);0<=T<=pi
9.X =7sin(t); Y=3sin(2t)*1cos(4t);0<=T<=pi
10.X =6sin(t); Y=4sin(2t)*1cos(4t);0<=T<=pi
11.X =5sin(t); Y=5sin(2t)*1cos(4t);0<=T<=pi
12.X =4sin(t); Y=6sin(2t)*1cos(4t);0<=T<=pi
Odgovor: Zadatak 01 - Krive u ravni
x=1tsin(2t)*sin(t)*1sin(2t) y= 1tsin(2t)*cos(t)*1sin(2t) 0<=0t<=2pi
x=1,2tsin(2t)*sin(t)*1,2sin(2t) y=1,2tsin(2t)*cos(t)*1,2sin(2t) 0<=0t<=2pi
x=1,3tsin(2t)*sin(t)*1,3sin(2t) y=1,3tsin(2t)*cos(t)*1,3sin(2t) 0<=0t<=2pi
x=1,4tsin(2t)*sin(t)*1,4sin(2t) y=1,4tsin(2t)*cos(t)*1,4sin(2t) 0<=0t<=2pi
x=1,5tsin(2t)*sin(t)*1,5sin(2t) y=1,5tsin(2t)*cos(t)*1,5sin(2t) 0<=0t<=2pi
x=1,6tsin(2t)*sin(t)*1,6sin(2t) y=1,6tsin(2t)*cos(t)*1,6sin(2t) 0<=0t<=2pi
x=2tsin(2t)*sin(t)*2sin(2t) y=2tsin(2t)*cos(t)*2sin(2t) 0<=0t<=2pi
x=1,5sin(t)1,5cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=1,6tsin(2t)*sin(t)*1,6sin(2t) y=1,6tsin(2t)*cos(t)*1,6sin(2t) 0<=0t<=2pi
x=1,7tsin(2t)*sin(t)*1,7sin(2t) y=1,7tsin(2t)*cos(t)*1,7sin(2t) 0<=0t<=2pi
x= 2sin(t)2cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=2,1tsin(2t)*sin(t)*2,1sin(2t) y=2,1tsin(2t)*cos(t)*2,1sin(2t) 0<=0t<=2pi
x=2,5sin(t)2,5cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=sin(t)cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=tan(t)sin(t) y=sin(t)cos(t) 0<=0t<=2pi
x=tan(t)sin(t) y=2sin(t)2cos(t) 0<=0t<=2pi
x= tan(t)sin(t)6sin(t) y=sin(t)cos(t) 0<=0t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=cos(t)sin(t); Y=tan(t)
X=2cos(t)sin(t); Y=tan(t)
X=4cos(t)sin(t); Y=tan(t)
X=6cos(t)sin(t); Y=tan(t)
X=8cos(t)sin(t); Y=tan(t)
X=10cos(t)sin(t); Y=tan(t)
X=16cos(t)sin(t); Y=tan(t)cos(2t)
X=14cos(t)sin(t); Y=tan(t)cos(2t)
X=12cos(t)sin(t); Y=tan(t)cos(2t)
X=10cos(t)sin(t); Y=tan(t)cos(2t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
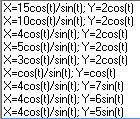
x=2tan(t); y=2cos(t)
x=4tan(t); y=4cos(t)
x=6tan(t); y=6tan(t)
x=2sin(t)4cos(t); y=2cos(t)
x=3sin(t)5cos(t); y=3cos(t)
x=8cos(t); y=8sin(t)2cos(t)
x=9cos(t); y=9sin(t)3cos(t)
x=4cos(t); y=4tan(t)
x=30cos(t); y=30sin(t)0.2cos(t)
x=30cos(t); y=30sin(t)0.1cos(t)
x=30cos(t); y=30sin(t)0.15cos(t)
x=15sin(t)1cos(t); y=15cos(t)
x=13sin(t)0.8cos(t); y=13cos(t)
granice parametara za sve: 0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
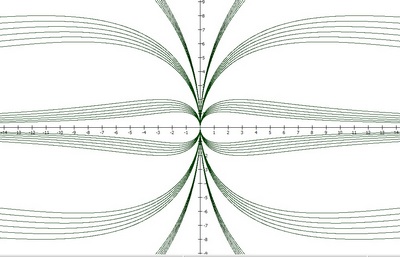
x=tsin(t)cos(t) y=8cos(t)
x=tsin(t)cos(t) y=16cos(t)
x=2sin(t)2cos(t) y=4cos(t)
x=4sin(t)4cos(t) y=16cos(t)
x=8sin(t)12cos(t) y=12cos(t)
x=2sin(t)2cos(t) y=2sin(t)
x=4sin(t)4.4cos(t) y=1208sin(t)
x=8sin(t)16cos(t) y=10sin(t)
x=8sin(t)2cos(t) y=10cos(t)
x=10sin(t)4cos(t) y=6cos(t)
x=2sin(t)6cos(t) y=8sin(t)
x=14sin(t)12cos(t) y=16cos(t)
0<=T<=2pi
Re: Zadatak 01 - Krive u ravni
x = cos(2t)
y = sin(t)+tan(2t)
x = 2cos(2t)
y = 2sin(t)+tan(4t)
x = 3cos(2t)
y = 3sin(t)+tan(6t)
x = 4cos(2t)
y = 4sin(t)+tan(8t)
x = 5cos(2t)
y = 5sin(t)+tan(10t)
0<=t<=2pi
Odgovor: Re: Zadatak 01 - Krive u ravni
x=sin(2t)*20cos(t) ... y=tan(t)
x=2.4sin(6t) ... y=tan(t)*sin(t)
x=3sin(3t) ... y=tan(t)*sin(t)
x=4.5sin(2t) ... y=tan(t)*cos(t)
x=4.5sin(2t) ... y=tan(t)*sin(t)
x=18sin(t)*cos(t) ... y=sin(t)
x=19sin(t)*cos(t) ... y=4sin(t)
x=sin(t)cos(t) ... y=tan(t)sin(t)
x=tan(t)sin(t)*6sin(t) ... y=6sin(t)8cos(t)
x=tan(t)sin(t)tan(t)sin(t) ... y=tan(t)sin(t)*6sin(t)
x=tan(t)sin(t)2sin(t) ... y=sin(t)cos(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)*cos(t), y=11sin(t)
x=3sin(t)*cos(t), y=10sin(t)
x=4sin(t)*cos(t), y=9sin(t)
x=5sin(t)*cos(t), y=8sin(t)
x=6sin(t)*cos(t), y=7sin(t)
x=7sin(t)*cos(t), y=6sin(t)
x=8sin(t)*cos(t), y=5sin(t)
x=9sin(t)*cos(t), y=4sin(t)
x=2sin(t), y=11sin(t)*cos(t)
x=3sin(t), y=10sin(t)*cos(t)
x=4sin(t), y=9sin(t)*cos(t)
x=5sin(t), y=8sin(t)*cos(t)
x=6sin(t), y=7sin(t)*cos(t)
x=7sin(t), y=6sin(t)*cos(t)
x=8sin(t), y=5sin(t)*cos(t)
x=9sin(t), y=4sin(t)*cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x = sin(t)cos(t) ; y = sin(t)
x = 3sin(t)cos(t) ; y = 3sin(t)
x = 5sin(t)cos(t) ; y = 5sin(t)
x = 7sin(t)cos(t) ; y = 7sin(t)
x = 9sin(t) ; y = 3sin(t)cos(t)
x = 8.5sin(t) ; y = 2.5sin(t)cos(t)
x = 8sin(t) ; y = 2sin(t)cos(t)
x = sin(t)cos(t) ; y = tan(t)
x = 2sin(t)cos(t) ; y = tan(t)
x = 3sin(t)cos(t) ; y = tan(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
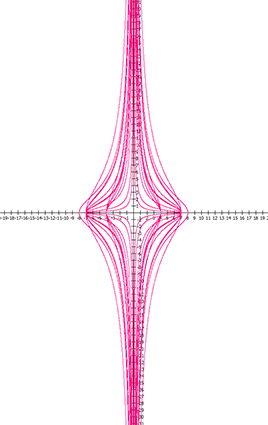
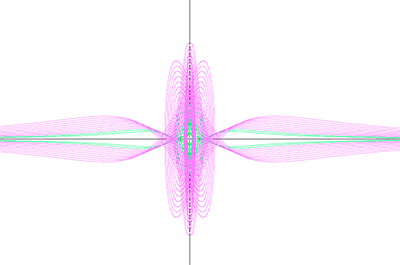
x=1/2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=3/2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=3tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=4tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=5tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=6tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=7tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=8tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=1/2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=10tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=15tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)2cos(t) y=6cos(t)
x=2sin(t)3cos(t) y=4cos(t)
x=tsin(t)cos(t) y=8cos(t)
x=3sin(t)3cos(t) y=2cos(t)
x=4sin(t)4cos(t) y=cos(t)
x=4sin(t)5cos(t) y=8sin(t)
x=5sin(t)5cos(t) y=6sin(t)
x=6sin(t)6cos(t) y=4sin(t)
x=6sin(t)7cos(t) y=2sin(t)
x=7sin(t)7cos(t) y=sin(t)
x=sin(t)*cos(2t)*tan(2t) y=sin(t)*cos(5t)
x=2sin(t)*cos(2t)*tan(2t) y=3sin(t)*cos(5t)
x=4sin(t)*cos(2t)*tan(2t) y=5sin(t)*cos(5t)
x=6sin(t)*cos(2t)*tan(2t) y=7sin(t)*cos(5t)
x=8sin(t)*cos(2t)*tan(2t) y=9sin(t)*cos(5t)
Odgovor: Zadatak 01 - Krive u ravni
x= rcost; y= y0 + sint
y0= -1,-2,-3,1,2,3;
r= 1,2,3
x= r*cos(n*t), y=r*sin(m*t)
r= 4; n=3; m= 5
Odgovor: Zadatak 01 - Krive u ravni
X=3sin(t)*2cos(t); Y=3cos(t)
X=8sin(t)*3cos(t); Y=5cos(t)
X=3sin(t); Y=2sin(t)*cos(t)
X=3cos(t)*2sin(t); Y=sin(t)
X=3cos(t)*3sin(t); Y=2cos(t)
X=5sin(t)*2cos(t); Y=4sin(t)
X=5cos(t)*sin(t); Y= 3cos(t)
X=8sin(t)*2cos(t); Y=4cos(t)
X=6sin(t)*2cos(t); Y=4sin(t)
X=12sin(t)*2cos(t); Y=cos(t)
Odgovor: Zadatak 01 - Krive u ravni
X=3tan(t)*4sin(t), Y=3cos(2t)*sin(t)*cos(5t)
X=3cos(2t)*sin(t)*cos(5t), Y=3tan(t)*3sin(t)
X=7sin(t)*cot(t), Y=1/2tan(t),
X=6sin(t)*cot(t), Y=1/2tan(t),
X=6,5sin(t)3cos(t), Y=3,5cos(t),
X=5,5sin(t)3cos(t), Y=4,5cos(t),
X=6sin(2t)*1cos(4t), Y= 10sin(t),
X=1sin(2t)*1cos(4t), Y= 5sin(t),
X=3sin(2t)*1cos(4t), Y= 7sin(t),
X=7sin(t), Y=3sin(2t)*1cos(4t),
X=8sin(t), Y=5sin(t)*cos(t),
X=10sin(t), Y=8sin(t)*cos(t),
Odgovor: Zadatak 01 - Krive u ravni
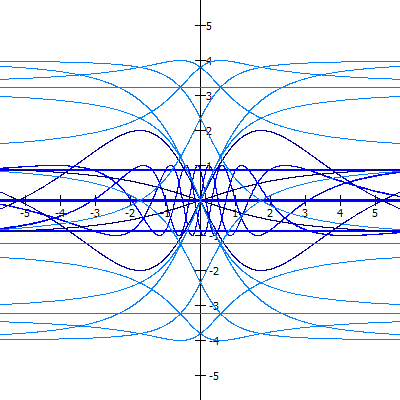
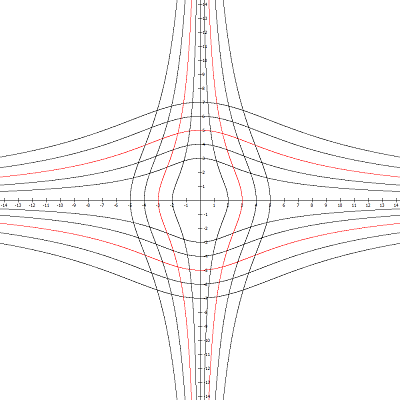
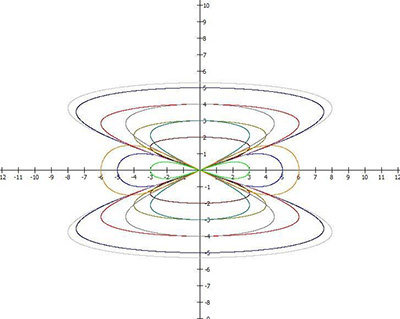
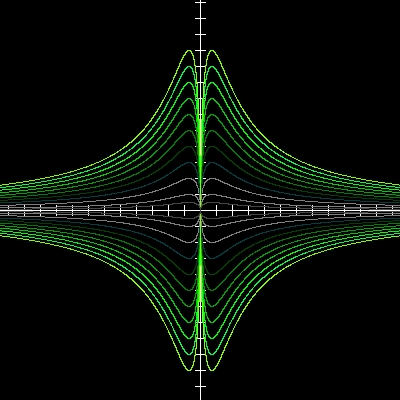
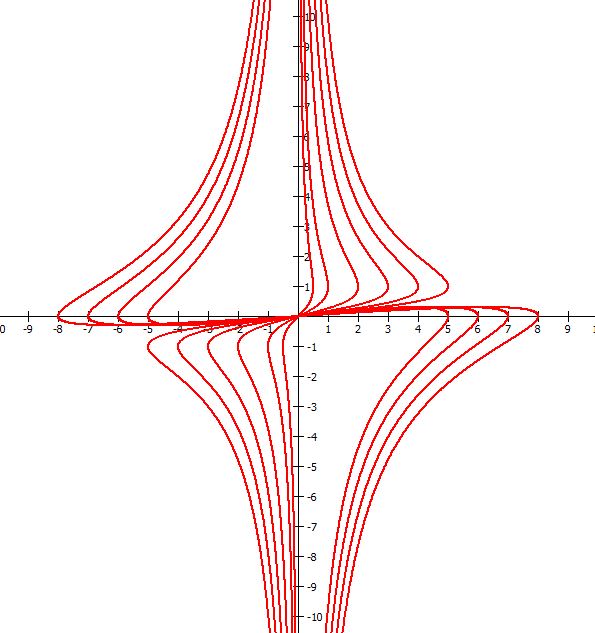
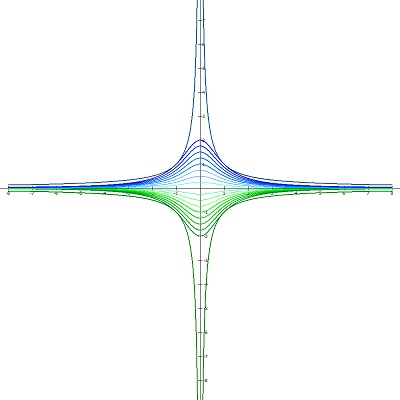
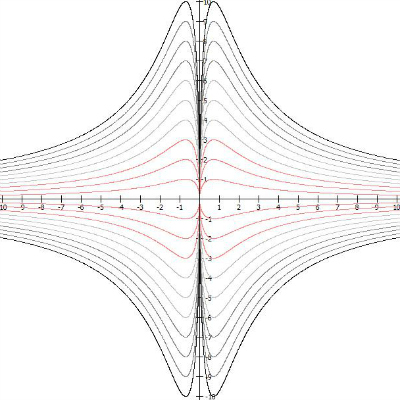
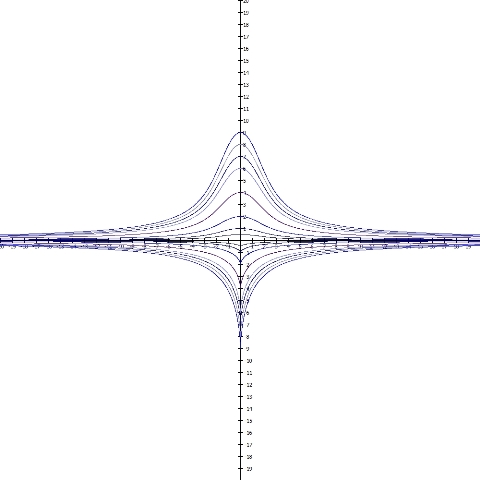
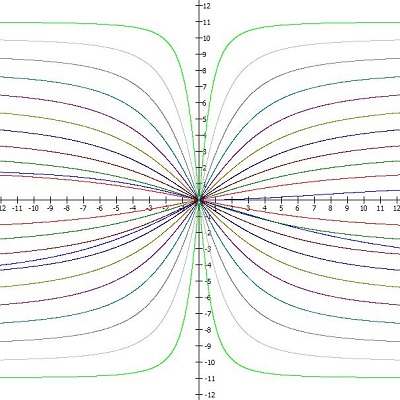
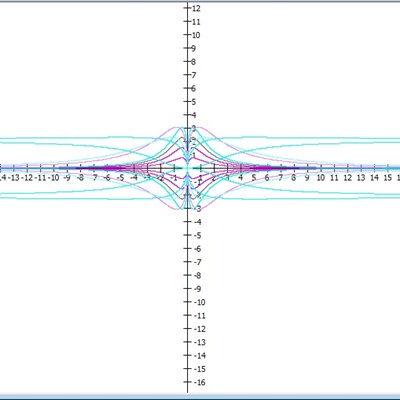
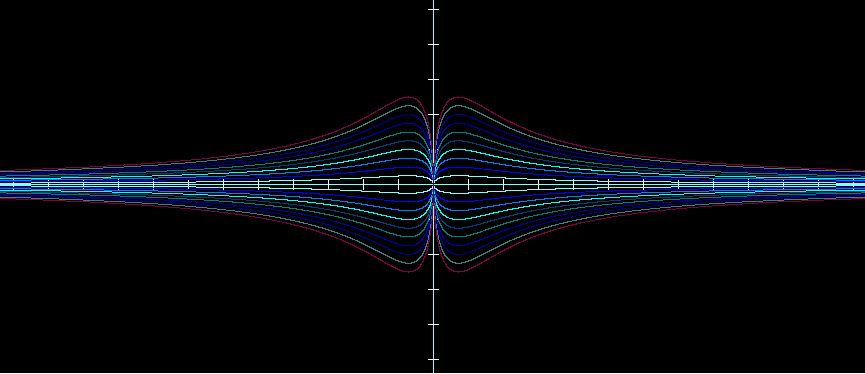
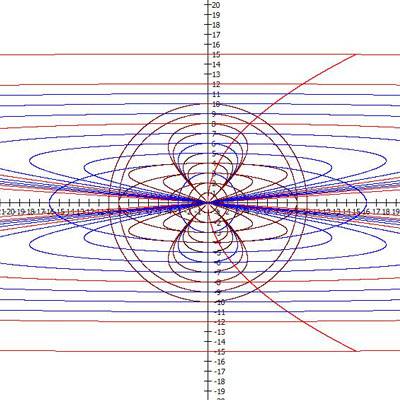
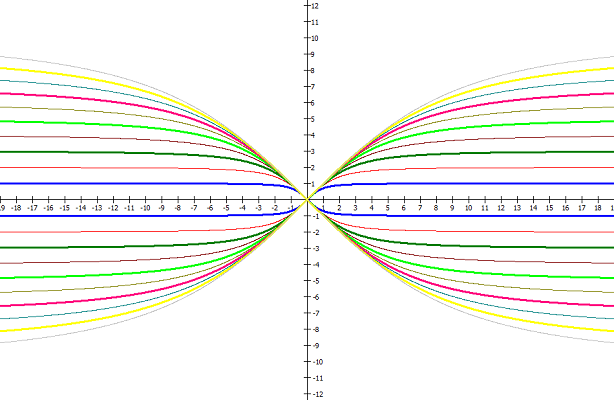
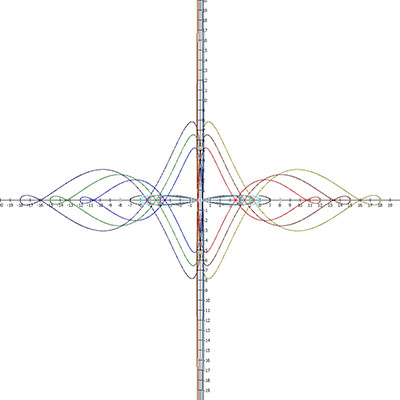
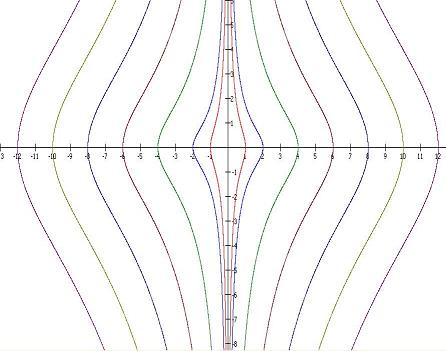
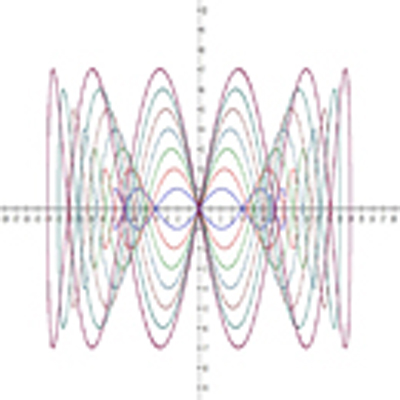
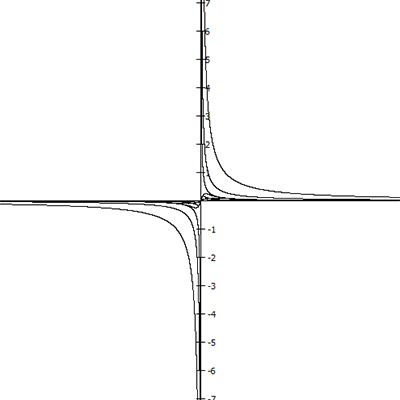
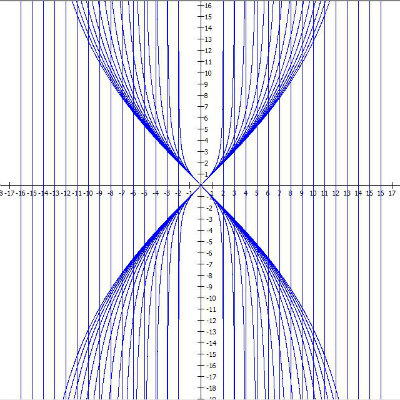
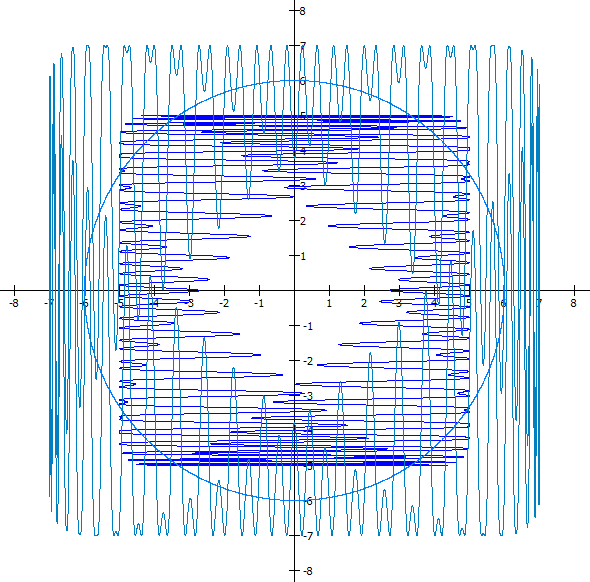
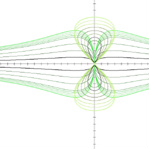
x=T, y=2/(1+T^2)
x=T, y=1.75/(1+T^2)
x=T, y=1.5/(1+T^2)
x=T, y=1.25/(1+T^2)
x=T, y=1/(1+T^2)
x=T, y=0.75/(1+T^2)
x=T, y=0.5/(1+T^2)
x=T, y=0.25/(1+T^2)
x=T, y=-2/(1+T^2)
x=T, y=-1.75/(1+T^2)
x=T, y=-1.5/(1+T^2)
x=T, y=-1.25/(1+T^2)
x=T, y=-1/(1+T^2)
x=T, y=-0.75/(1+T^2)
x=T, y=-0.5/(1+T^2)
x=T, y=-0.25/(1+T^2)
x=T, y=1/abs(T)
x=T, y=-1/abs(T)
__________________________
-8<=T<=8
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*sin(t) y=-2cos(t)*sin(t)
x=tan(t)*sin(t) y=4cos(t)*sin(t)
x=tan(t)*sin(t) y=6cos(t)*sin(t)
x=tan(t)*sin(t) y=8cos(t)*sin(t)
x=tan(t)*sin(t) y=10cos(t)*sin(t)
x=tan(t)*sin(t) y=12cos(t)*sin(t)
x=tan(t)*sin(t) y=14cos(t)*sin(t)
x=tan(t)*sin(t) y=16cos(t)*sin(t)
x=tan(t)*sin(t) y=18cos(t)*sin(t)
x=tan(t)*sin(t) y=20cos(t)*sin(t)
0<t<2pi
Odgovor: Zadatak 01 - Krive u ravni
x=tsin(t)cos(t) , y=9cos(t)
x=1sin(t)cos(t) , y=8cos(t)
x=2sin(t)cos(t) , y=7cos(t)
x=3sin(t)cos(t) , y=6cos(t)
x=4sin(t)cos(t) , y=5cos(t)
x=5sin(t)cos(t) , y=4cos(t)
x=6sin(t)cos(t) , y=3cos(t)
x=7sin(t)cos(t) , y=2cos(t)
x=8sin(t)cos(t) , y=1cos(t)
x=9sin(t)cos(t) , y=cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=5.7*sin(2t) y=3*cos(t)
x=9*sin(2t) y=1*cos(t)
x=2*sin(2t) y=5*sin(t)
x=3.5*sin(2t) y=8*sin(t)
x=10*sin(2t) y=10*sin(t)
x=10*sin(2t) y=2*cos(t)
x=11.8*sin(2t) y=14*cos(2t)
x=4*sin(2t) y=12*cos(t)
x=1*sin(2t) y=14*cos(t)
x=2*sin(2t) y=13*cos(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
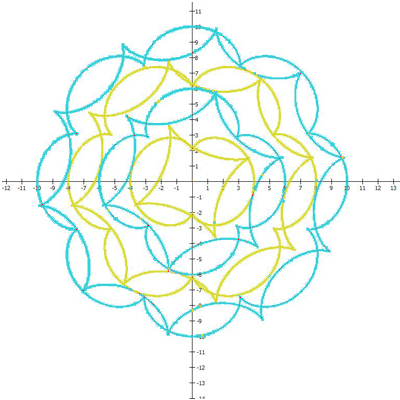
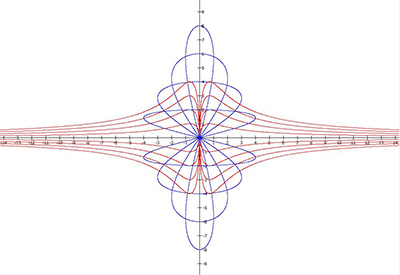
X=3tan(t)*3sin(t) , Y=3cos(t)*3sin(t)
X=5tan(t)*5sin(t) , Y=5cos(t)*5sin(t)
X=1.6tan(t)*1.6sin(t) , Y=1.6cos(t)*1.6sin(t)
X=1.7tan(t)*1.7sin(t) , Y=1.7cos(t)*1.7sin(t)
X=1.8tan(t)*1.8sin(t) , Y=1.8cos(t)*1.8sin(t)
X=1.9tan(t)*1.9sin(t) , Y=1.9cos(t)*1.9sin(t)
X=tan(3t)sin(2t) , Y=-tan(t)
X=tan(3t)sin(2t) , Y=tan(t)
X=3cos(2t)*sin(t)*cos(5t) , Y=3tan(t)*3sin(t)
X=3tan(t)*3sin(t) , Y=3cos(2t)*sin(t)*cos(5t)
X=5.5sin(t)3cos(t) , Y=4.5cos(t)
X=6sin(t)3cos(t) , Y=4cos(t)
X=1.5sin(t)3cos(t) , Y=8.5cos(t)
Granica:
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
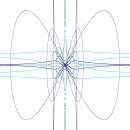
0≤t≤2Π
x=asin(bt)cos(bt) y=tan(ct)
a=(1, 5, -5), b=(3, 1, 1), c=(2, 1, 1)
x=asin(t)cot(t) y=btan(t)
a=(6, 9), b=(1, 0.5)
x=asin(t) y=bsin(t)cos(t)
a=(4, 9), b=(1, 2)
x=a(cos(T))³ y=b(sin(T))³
a=(4, 3), b=(4, 3)
x=asin(bT)cos(cT) y=asin(bT)sin(cT)
a=1.5, b=5, c=2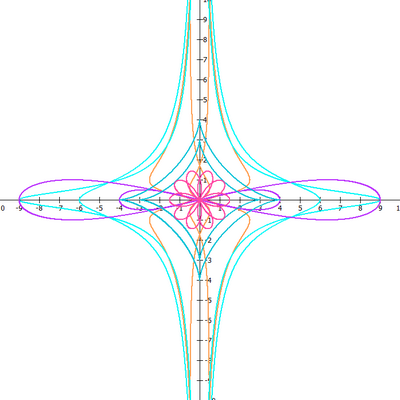
Odgovor: Zadatak 01 - Krive u ravni
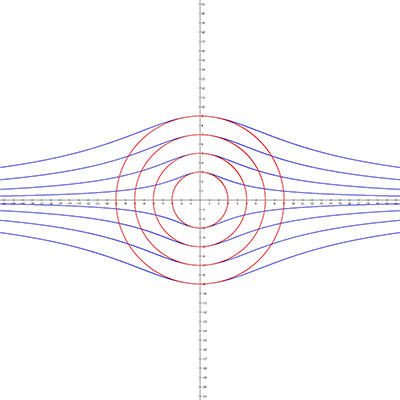
x=2cos(t) y=5sin(t)
x=3cos(t) y=6sin(t)
x=4cos(t) y=7sin(t)
x=5cos(t) y=2sin(t)
x=6cos(t) y=3sin(t)
x=7cos(t) y=4sin(t)
x=2,5cos(t) y=5,5sin(t)
x=3,5cos(t) y=6,5sin(t)
x=1,5sin(t)*2,5cos(t)*1,5sin(t) y=1,5cos(t)*2,5sin(t)*1,5cos(t)
x=2,5sin(t)*3,5cos(t)*2,5sin(t) y=2,5cos(t)*3,5sin(t)*2,5cos(t)
x=0,5sin(t)*1,5cos(t)*0,5sin(t) y=0,5cos(t)*1,5sin(t)*0,5cos(t)
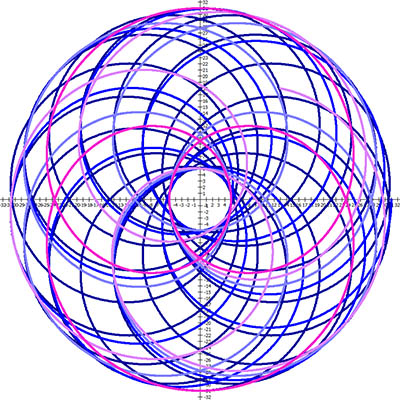
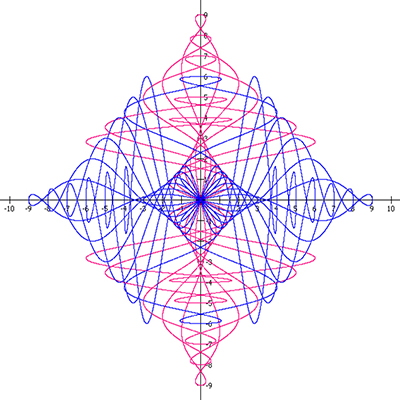
x=11sin(t)+3cos(t) y=4cos(t)+5sin(t)
x=4cos(t)+5sin(t) y=11sin(t)+3cos(t)
x=12sin(t)+4cos(t) y=5cos(t)+6sin(t)
x=13sin(t)+5cos(t) y=6cos(t)+7sin(t)
x=14sin(t)+6cos(t) y=7cos(t)+8sin(t)
x=5cos(t)+6sin(t) y=12sin(t)+4cos(t)
x=6cos(t)+7sin(t) y=13sin(t)+5cos(t)
x=7cos(t)+8sin(t) y=14sin(t)+6cos(t)
x=7sin(t)-2cos(t) y=12cos(t)-3sin(t)
x=8sin(t)-3cos(t) y=13cos(t)-4sin(t)
x=11sin(t)-3cos(t) y=4cos(t)-5sin(t)
x=9sin(t)-4cos(t) y=14cos(t)-5sin(t)
x=10sin(t)-5cos(t) y=15cos(t)-6sin(t)
x=12sin(t)-4cos(t) y=5cos(t)-6sin(t)
x=13sin(t)-5cos(t) y=6cos(t)-7sin(t)
x=14sin(t)-6cos(t) y=7cos(t)-8sin(t)
x=7sin(t)+2cos(t) y=12cos(t)+3sin(t)
x=8sin(t)+3cos(t) y=13cos(t)+4sin(t)
x=9sin(t)+4cos(t) y=14cos(t)+5sin(t)
x=10sin(t)+5cos(t) y=15cos(t)+6sin(t)
x=5cos(t)-6sin(t) y=12sin(t)-4cos(t)
x=6cos(t)-7sin(t) y=13sin(t)-5cos(t)
x=7cos(t)-8sin(t) y=14sin(t)-6cos(t)
x=10cos(t) y=13sin(t)
x=11cos(t) y=14sin(t)
x=12cos(t) y=15sin(t)
x=13cos(t) y=16sin(t)
x=14cos(t) y=17sin(t)
x=15cos(t) y=18sin(t)
x=16cos(t) y=19sin(t)
x=17cos(t) y=20sin(t)
x=18cos(t) y=21sin(t)
Odgovor: Zadatak 01 - Krive u ravni
0<t<2pi
x=tan(t)*sin(t) y=-2cos(t)*sin(t)
x=tan(t)*sin(t) y=3cos(t)*sin(t)
x=tan(t)*sin(t) y=4cos(t)*sin(t)
x=tan(t)*sin(t) y=5cos(t)*sin(t)
x=tan(t)*sin(t) y=6cos(t)*sin(t)
x=tan(t)*sin(t) y=7cos(t)*sin(t)
x=tan(t)*sin(t) y=8cos(t)*sin(t)
x=tan(t)*sin(t) y=9cos(t)*sin(t)
x=tan(t)*sin(t) y=10cos(t)*sin(t)
x=tan(t)*sin(t) y=11cos(t)*sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t) y=sin(t)*cos(2t)
x=sin(t)*cos(4t) y=tan(t)
x=sin(t)*cos(2t)^3 y=tan(t)
x=tan(t) y=sin(t)*cos(4t)
x=sin(2t) y=sin(2t)*cos(6t)
x=sin(t) y-5tan(t)
x=sin(t)*5tan(t) y=5sin(t)*cos(t)
x=2cos(t)*tan(t) y=3tan(t)
x=5sin(t) y=4tan(t)
x=4sin(t) y=5cos(t)*3sin(t)
x=6sin(t) y=3cos(t0*2sin(t)
x=6sin(t) y=2cos(t)*2sin(t)
x=2sin(t) y=5cos(t)*3sin(t)
Odgovor: Zadatak 01 - Krive u ravni
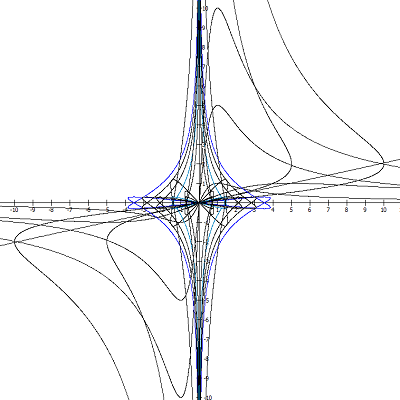
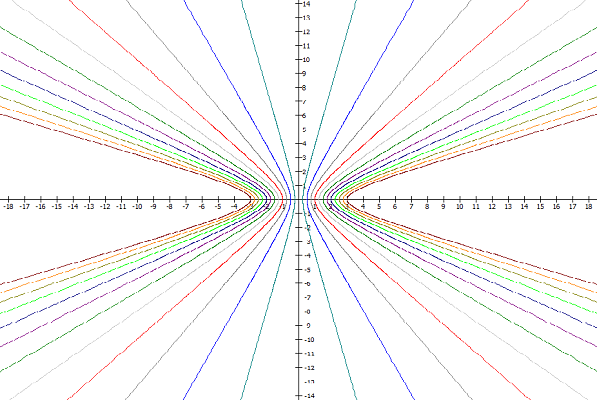
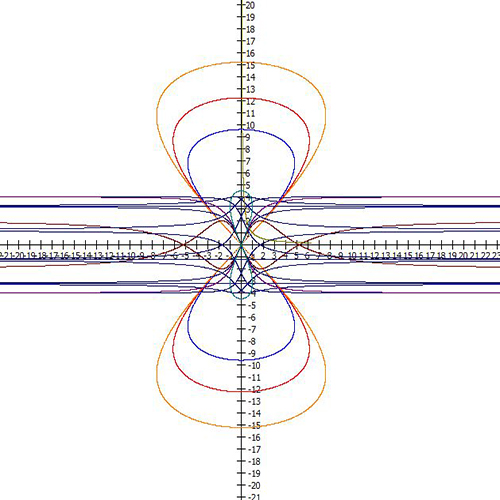
x = asect, y = btant, -pi/2 < t < 3pi/2
a = 0.25, b = 1
a = 0.5, b = 1
a = 0.75, b = 1
a = 1, b = 1
a = 1.25, b = 1
a = 1.5, b = 1
a = 1.75, b = 1
a = 2, b = 1
a = 2.25, b = 1
a = 2.5, b = 1
a = 2.75, b = 1
a = 3, b = 1
Odgovor: Zadatak 01 - Krive u ravni
x=2Cos(1 * t) - Cos(5 * t)^3 y=Sin(1 * t) - Sin(5 * t)^3
x=3Cos(1 * t) - Cos(5 * t)^3 y=2Sin(1 * t) - Sin(5 * t)^3
x=4Cos(1 * t) - Cos(5 * t)^3 y=3Sin(1 * t) - Sin(5 * t)^3
x=5Cos(1 * t) - Cos(5 * t)^3 y=4Sin(1 * t) - Sin(5 * t)^3
x=6Cos(1 * t) - Cos(5 * t)^3 y=5Sin(1 * t) - Sin(5 * t)^3
x=7Cos(1 * t) - Cos(5 * t)^3 y=6Sin(1 * t) - Sin(5 * t)^3
x=8Cos(1 * t) - Cos(5 * t)^3 y=7Sin(1 * t) - Sin(5 * t)^3
x=9Cos(1 * t) - Cos(5 * t)^3 y=8Sin(1 * t) - Sin(5 * t)^3
x=10Cos(1 * t) - Cos(5 * t)^3 y=9Sin(1 * t) - Sin(5 * t)^3
x=11Cos(1 * t) - Cos(5 * t)^3 y=10Sin(1 * t) - Sin(5 * t)^3
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
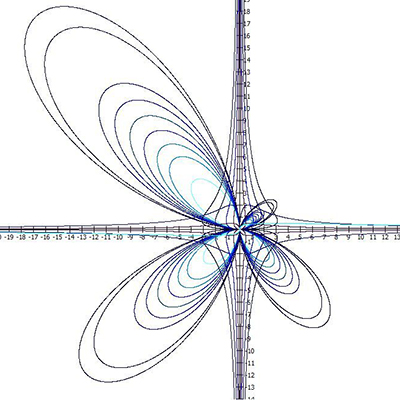
x=11tan(t) , y=tcos(t)tan(t)
x=10tan(t) , y=2cos(t)tan(t)
x=9tan(t) , y=3cos(t)tan(t)
x=8tan(t) , y=4cos(t)tan(t)
x=7tan(t) , y=5cos(t)tan(t)
x=6tan(t) , y=6cos(t)tan(t)
x=5tan(t) , y=7cos(t)tan(t)
x=4tan(t) , y=8cos(t)tan(t)
x=3tan(t) , y=9cos(t)tan(t)
x=2tan(t) , y=10cos(t)tan(t)
x=1tan(t) , y=11cos(t)tan(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=6tan(t)*4sinn(t); y=6cos(t)*6sin(t)
x=10tan(t)*10sin(t); y=10cos(t)*10sin(t)
x=2tan(t)*2sin(t); y=2cos(t)*sin(t)
x=4tan(t)*4sin(t); y=4cos(t)*4sin(t)
x=3tan(t)*3sin(t); y+3cos(t)*3sin(t)
x=5tan(t)*5sin(t); y=5cos(t)*5sin(t)
x=sin(t)cos(t);y=cos(t); y=8cps(t)
x=3sin(t)cos(t); y=10cos(t)
x=3sin(t)cos(t); y=9cos(t)
x=6sin(t)cos(t):y=15cos(t)
x=1sin(t)cos(t); y=3cos(t)
x=7sin(t)1cos(t) y=2cos(t)*1cos(2t)
x=7sin(t)cos(t); y=7cos(t)
x=9sin(t)1cos(t);y=9cos(t)
x=10sin(t)cos(t); y=10cos(t)
x=13sin(t)cos(t); y=13cos(t)
x=15sin(t)cos(t); y=15cos(t)
x=17sin(t)cos(t); y=17cos(t)
x=19sin(t)c0s(t); y=19cos(t)
x=21sin(t)cos(t); y=21cos(t)
x=8tan(t)8sin(t); y=8cos(t)*8sin(t)
x=23sin(t)1c0s(t); y=23cos(t)
x=7sin(t); y=7sin(t)cos(t)
x=9sin(t);y=9sin(t)cos(t)
x=11sin(t); y=11sin(t)cos(t)
x=13sin(t); y=13sin(t)cos(t)
x=15sin(t);y=15sin(t)cos(t)
x=18sin(t); y=18sin(t)cos(t)
x=22sin(t); y=22sin(t)cos(t)
Odgovor: Zadatak 01 - Krive u ravni
X=2sin(t)*cos(t); Y=2tan(t)*cos(t); X=3sin(t)*cos(t); Y=3tan(t)*cos(t); X=4sin(t)*cos(t); Y=4tan(t)*cos(t); X=5sin(t)*cos(t); Y=5tan(t)*cos(t); X=6sin(t)*cos(t); Y=6tan(t)*cos(t); X=7sin(t)*cos(t); Y=7tan(t)*cos(t); X=8sin(t)*cos(t); Y=8tan(t)*cos(t); X=9sin(t)*cos(t); Y=9tan(t)*cos(t); X=10sin(t)*cos(t); Y=10tan(t)*cos(t); X=2*tan(t)*3*sin(t); Y=2*sin(t)*3*cos(t)*cos(5t); X=3*tan(t)*3*sin(t); Y=3*sin(t)*3*cos(t)*cos(5t); X=4*tan(t)*3*sin(t); Y=4*sin(t)*3*cos(t)*cos(5t); X=5*tan(t)*3*sin(t); Y=5*sin(t)*3*cos(t)*cos(5t);
Odgovor: Zadatak 01 - Krive u ravni
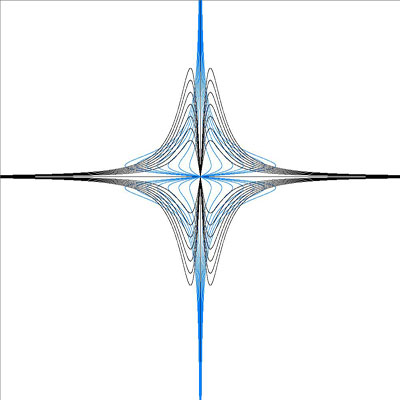
1.x=2tan(t)*2sin(t), y=2cos(t)*2sin(t); 0<=t<=2pi
2.x=4tan(t)*4sin(t), y=4cos(t)*4sin(t); 0<=t<=2pi
3.x=6tan(t)*6sin(t), y=6cos(t)*6sin(t); 0<=t<=2pi
4.x=1.9tan(t)*1.9sin(t), y=1.9cos(t)*1.9sin(t); 0<=t<=2pi
5.x=1.8tan(t)*2sin(t), y=1.8cos(t)*1.8sin(t); 0<=t<=2pi
6.x=1.7tan(t)*1.7sin(t), y=1.7cos(t)*1.7sin(t); 0<=t<=2pi
7.x=1.6tan(t)*1.6sin(t), y=1.6cos(t)*1.6sin(t); 0<=t<=2pi
8.x=1.5tan(t)*1.5sin(t), y=1.5cos(t)*1.5sin(t); 0<=t<=2pi
9.x=5.9tan(t)*5.9sin(t), y=5.9cos(t)*5.9sin(t); 0<=t<=2pi
10.x=5.8tan(t)*5.8sin(t), y=5.8cos(t)*5.8sin(t); 0<=t<=2pi
11.x=5.7tan(t)*5.7sin(t), y=5.7cos(t)*5.7sin(t); 0<=t<=2pi
12.x=5.6tan(t)*5.6sin(t), y=5.6cos(t)*5.6sin(t); 0<=t<=2pi
13.x=5.5tan(t)*5.5sin(t), y=5.5cos(t)*5.5sin(t); 0<=t<=2pi
14.x=1.9tan(t)*1.9sin(t), y=1.9cos(t)*1.9sin(t); 0<=t<=2pi
15.x=1.8tan(t)*1.8sin(t), y=1.8cos(t)*1.8sin(t); 0<=t<=2pi
16.x=1.7tan(t)*1.7sin(t), y=1.7cos(t)*1.7sin(t); 0<=t<=2pi
17.x=1.6tan(t)*1.6sin(t), y=1.6cos(t)*1.6sin(t); 0<=t<=2pi
18.x=1.5tan(t)*1.5sin(t), y=1.5cos(t)*1.5sin(t); 0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=4cos(t) y=2tan(t)
x=5cos(t) y=3tan(t)
x=6cos(t) y=4tan(t)
x=7cos(t) y=5tan(t)
x=4sin(t)*cos(2t)*tan(2t) y=2sin(t)*cos(5t)
x=8sin(t)*cos(7t)*tan(6t) y=6sin(t)*cos(9t)
x=2cos(3t)*tan(t); y=2cos(t)*cos(2t)
Odgovor: Zadatak 01 - Krive u ravni
2cos(t)5sin(t) 2cot(t)
5sint1cost 4cott
7sin(t)2cos(t) 3sin(t)
8sin(t)6cos(t) 2sin(t)
4cos(t)2sin(t) 4cot(t)
4cos(t) 4cos(t)2sin(t)
8sin(t)3cos(t) 5cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*sin(t) / y=cos(t)*sin(2t) / 0<t<2π
x=tan(t)*sin(t) / y=2cos(t)*sin(2t) / 0<t<2π
x=tan(t)*sin(t) / y=3cos(t)*sin(2t) / 0<t<2π
x=tan(t)*sin(t) / y=4cos(t)*sin(2t) / 0<t<2π
x=2tan(t)*sin(t) / y=4cos(t)*sin(2t) / 0<t<2π
x=3tan(t)*sin(t) / y=3cos(t)*sin(2t) / 0<t<2π
x=3tan(2t)*sin(t) / y=3cos(t)*sin(2t) / 0<t<2π
Odgovor: Zadatak 01 - Krive u ravni
0<=t<=2pi
X=tan(t)*sin(t) Y=a*cos(t)*sin(t)
X=konstanta, y se menja za
1. a=1/2
2. a=1
3. a=3/2
4. a=2
5. a=5/2
6. a=3
7. a=7/2
8. a=4
9. a=9/2
10 a=5
Odgovor: Zadatak 01 - Krive u ravni
x=3sin(t)cos(t) y=2sin(t)
x=4sin(t)cos(t) y=3sin(t)
x-5sin(t)cos(t) y=4sin(t)
x-6sin(t)cos(t) y=5sin(t)
x=7sin(t)cos(t) y=6sin(t)
x=8sin(t)cos(t) y=7sin(t)
x=9sin(t)cos(t) y=8sin(t)
x=10sin(t)cos(t) y=9cos(t)
x=11sin(t) y=11cos(t)
x=12sin(t) y=13cos(t)
x=13sin(t) y=14cos(t)
0 <= T <= 2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2cos(t) y=9sin(t)
x=3cos(t)*2sin(t) y=7cos(t)
x=2sin(t)*cos(2t) y=(t)*cos(6t)
x=-sin(6t)*cot(t) y=cos(3t)*tan(t)
x=3tan(2t)*6sin(t) y=3cos(t)*5sin(t)*cos(7t)
x=3sin(t)*tan(t) y=2sin(t)*3cos(t)
x=2sin(t)*3cos(t) y=4sin(t)*tan(t)
x=2sin(t) y=11sin(t)*cos(t)
x=5sin(t)*tan(t) y=2sin(t)*3cos(t)
x=2sin(t)*3cos(t) y=2sin(t)*tan(t)
x=10sin(t) y=13sin(t)*cos(t)-5sin(2t)
x=11sin(t) y=13sin(t)*cos(t)-6sin(2t)
x=14sin(t) y=13sin(t)*cos(t)-1sin(2t)
x=15sin(t) y=13sin(t)*cos(t)-0.9sin(2t)
x=16sin(t) y=13sin(t)*cos(t)-0.8sin(2t)
x=17sin(t) y=13sin(t)*cos(t)-0.7sin(2t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=cos(7*t)-cos(1*t)^3 y=sin(7*t)-sin(1*t)^3
x=(3-1)*cos(t)-4*cos((3+1)*t/1) y=(3-1)*sin(t)-4*sin((3+1)*t/1)
x=sin(t)6 y=cos(t)6
x=sin(t)5 y=cos(t)5
x=sin(t)4 y=cos(t)4
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=sin(4)*8cos(t) y=tan(t)
x=sin(2t)*6cos(t) y=tan(t)
x=tan(t) y=sin(4t)*8cos(t)
x=tan(t) y=sin(2t)*6cos(t)
x=sin(5t)*6cos(t) y=-tan(t)
X=sin(2t)*8cos(t) y=tan(t)
x=tan(t) y=sin(2t)*8cos(t)
x=sin(2t)*10cos(t) y=tan(t)
x=tan(t) y=sin(2t)*10cos(t)
x=sin(6t)*15cos(t) y=tan(t)
0<=T<=2Pi
Odgovor: Zadatak 01 - Krive u ravni
0<=T<=2pi
x=tan(t)*2sin(t) y=sin(t)*cos(t)
x=tan(t)*3sin(t) y=2sin(t)*cos(t)
x=tan(t)*4sin(t) y=3sin(t)*cos(t)
x=tan(t)*5sin(t) y=4sin(t)*cos(t)
x=tan(t)*6sin(t) y=5sin(t)*cos(t)
x=tan(t)*7sin(t) y=6sin(t)*cos(t)
x=tan(t)*8sin(t) y=7sin(t)*cos(t)
x=tan(t)*9sin(t) y=8sin(t)*cos(t)
x=tan(t)*10sin(t) y=9sin(t)*cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=a sin(t)cos(t) y=tan(t)cos(t)
a=1/2
a=t
a=3/2
a=2
a=3
a=4
a=5/2
a=7/2
a=5
a=9/2
a=11/2
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=sin(2t)*1cos(t) y=1.4tan(t)
x=sin(2t)*2cos(t) y=1.6tan(t)
x=sin(2t)*3cos(t) y=1.8tan(t)
x=sin(2t)*4cos(t) y=2tan(t)
x=sin(2t)*5cos(t) y=2.4tan(t)
x=sin(2t)*6cos(t) y=2.2tan(t)
x=sin(2t)*8cos(t) y=2.6tan(t)
x=sin(2t)*10cos(t) y=2.8tan(t)
x=sin(2t)*15cos(t) y=3tan(t)
x=sin(2t)*20cos(t) y=3.2tan(t)
0<= t <= 2pi
Odgovor: Zadatak 01 - Krive u ravni
x=0.2cos(t)*0.2sin(t)
x=0.3cos(t)*0.3sin(t)
x=0.5cos(t)*0.5sin(t)
x=0.7cos(t)*0.7sin(t)
x=0.9cos(t)*0.9sin(t)
x=1.1cos(t)*1.1sin(t)
x=2cos(t)*2sin(t)
x=3cos(t)*3sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x=3tan(t)*4sin(t) y=3cos(t)*3sin(t)
x=5tan(t)*5sin(t) y=5cos(t)*5sin(t)
x=tan(t)*sin(t) y=2cos(t)*5sin(t)
x=2tan(t)*2sin(t) y=2cos(t)*2sin(t)
x=6tan(t)*6sin(t) y=6cos(t)*6sin(t)
x=3sin(t)*cos(2t)*tan(2t) y=sin(t)*2cos(5t)
x=4sin(t)*cos(7t)*tan(6t) y=3sin(t)*cos(6t)
x=cos(3t)*tan(t) y=2cos(t)*cos(2t)
x=2tan(t)*sin(t) y=4cos(t)*sin(2t)
x=3tan(t)*sin(t) y=3cos(t)*sin(2t)
x=3tan(2t)*sin(t) y=3cos(t)*sin(2t)
x=6sin(t)*cos(t) y=5sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x: sin(2t)*cos(t); y: tan(t)
x: sin(2t)*2cos(t); y: tan(t)
x: sin(2t)*3cos(t); y: tan(t)
x: sin(2t)*4cos(t); y: tan(t)
x; sin(2t)*5cos(t); y: tan(t)
x: sin(2t)*6cos(t); y: tan(t)
x: sin(2t)*7cos(t); y: tan(t)
x: tan(t); y: sin(2t)*3cos(t)
x: tan(t); y: sin(2t)*4cos(t)
x: tan(t); y: sin(2t)*5cos(t)
x: tan(t); y: sin(2t)*6cos(t)
x: tan(t); y: sin(2t)*7cos(t)
x: tan(t); y: sin(2t)*8cos(t)
x: tan(t); y: sin(2t)*9cos(t)
gornja i donja granica: 0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=1tsin(2t)*sin(t)*1sin(2t) y= 1tsin(2t)*cos(t)*1sin(2t) 0<=0t<=2pi
x=1,2tsin(2t)*sin(t)*1,2sin(2t) y=1,2tsin(2t)*cos(t)*1,2sin(2t) 0<=0t<=2pi
x=1,3tsin(2t)*sin(t)*1,3sin(2t) y=1,3tsin(2t)*cos(t)*1,3sin(2t) 0<=0t<=2pi
x=1,4tsin(2t)*sin(t)*1,4sin(2t) y=1,4tsin(2t)*cos(t)*1,4sin(2t) 0<=0t<=2pi
x=1,5tsin(2t)*sin(t)*1,5sin(2t) y=1,5tsin(2t)*cos(t)*1,5sin(2t) 0<=0t<=2pi
x=1,6tsin(2t)*sin(t)*1,6sin(2t) y=1,6tsin(2t)*cos(t)*1,6sin(2t) 0<=0t<=2pi
x=2tsin(2t)*sin(t)*2sin(2t) y=2tsin(2t)*cos(t)*2sin(2t) 0<=0t<=2pi
x=1,5sin(t)1,5cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=1,6tsin(2t)*sin(t)*1,6sin(2t) y=1,6tsin(2t)*cos(t)*1,6sin(2t) 0<=0t<=2pi
x=1,7tsin(2t)*sin(t)*1,7sin(2t) y=1,7tsin(2t)*cos(t)*1,7sin(2t) 0<=0t<=2pi
x= 2sin(t)2cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=2,1tsin(2t)*sin(t)*2,1sin(2t) y=2,1tsin(2t)*cos(t)*2,1sin(2t) 0<=0t<=2pi
x=2,5sin(t)2,5cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=sin(t)cos(t) y=tan(t)sin(t) 0<=0t<=2pi
x=tan(t)sin(t) y=sin(t)cos(t) 0<=0t<=2pi
x=tan(t)sin(t) y=2sin(t)2cos(t) 0<=0t<=2pi
x= tan(t)sin(t)6sin(t) y=sin(t)cos(t) 0<=0t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
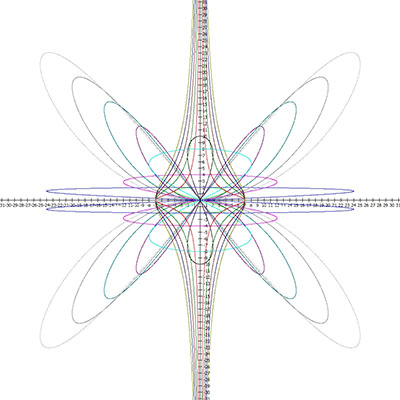
x = asin(3t), y = bsin(2t), 0 <= t <= 2pi
a = b = 1
a = b = 3
a = b = 5
a = b = 7
a = b = 9
Odgovor: Zadatak 01 - Krive u ravni
0<=T<=2Pi
x=22sin(t) y=22sin(t)cos(t)
x=18sin(t) y=18sin(t)cos(t)
x=15sin(t) y=15sin(t)cos(t)
x=13sin(t) y=13sin(t)cos(t)
x=11sin(t) y=11sin(t)cos(t)
x=9sin(t) y=9sin(t)cos(t)
x=7sin(t) y=7sin(t)cos(t)
x=5sin(t) y=5sin(t)cos(t)
x=22sin(t)cos(t) y=22sin(t)
x=18sin(t)cos(t) y=18sin(t)
x=15sin(t)cos(t) y=15sin(t)
x=13sin(t)cos(t) y=13sin(t)
x=11sin(t)cos(t) y=11sin(t)
x=9sin(t)cos(t) y=9sin(t)
x=7sin(t)cos(t) y=7sin(t)
x=5sin(t)cos(t) y=5sin(t)
x=1tan(t) y=11cos(t)tan(t)
x=2tan(t) y=10cos(t)tan(t)
x=-1tan(t) y=14cos(t)tan(t)
x=-2tan(t) y=16cos(t)tan(t)
x=-3tan(t) y=18cos(t)tan(t)
x=-4tan(t) y=20cos(t)tan(t)
Odgovor: Zadatak 01 - Krive u ravni
x=tsin(t)4cos(t) y=5cos(t)
x=7sin(t)6cos(t) y=3cos(t)
x=13sin(t)9cos(t) y=1.5cos(t)
x=5sin(t)7cos(t) y=5cos(t)
x=3.5sin(t)7cos(t) y=7cos(t)
x=sin(t)1.5cos(t) y=3cos(t)
x=2sin(t)8cos(t) y=6cos(t)
x=9sin(t)9cos(t) y=3cos(t)
x=11sin(t)3cos(t) y=4cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
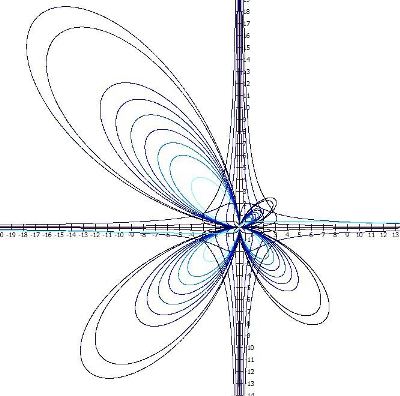
X=1.5tan(t)1.5sin(t)
Y=5cos(t)5sin(t)
X=2tan(t)2sin(t)
Y=6cos(t)6sin(t)
X=4tan(t)4sin(t)
Y=5cos(t)5sin(t)
X=5tan(t)5sin(t)
Y=4cos(t)4sin(t)
X=6tan(t)6sin(t)
Y=2cos(t)2sin(t)
X=2tan(t)2sin(t)
Y=-2cos(t)-2sin(t)
X=3tan(t)3sin(t)
Y=-3cos(t)-3sin(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
0<=T<=2pi
x=tsin(t)cos(t) y=2cos(t)
x=tsin(t)cos(t) y=4cos(t)
x=tsin(t)cos(t) y=6cos(t)
x=tsin(t)cos(t) y=8cos(t)
x=tsin(t)cos(t) y=10cos(t)
x=2sin(t)cos(t) y=2cos(t)
x=4sin(t)cos(t) y=4cos(t)
x=6sin(t)cos(t) y=6cos(t)
x=8sin(t)cos(t) y=8cos(t)
x=10sin(t)cos(t) y=10cos(t)
x=-tsin(t)cos(t) y=2cos(t)
x=-tsin(t)cos(t) y=4cos(t)
x=-tsin(t)cos(t) y=6cos(t)
x=-tsin(t)cos(t) y=8cos(t)
x=-tsin(t)cos(t) y=10cos(t)
x=2sin(t)4cos(t) y=2cos(t)
x=4sin(t)6cos(t) y=4cos(t)
x=2sin(t)8cos(t) y=8cos(t)
x=2sin(t)2cos(t) y=10cos(t)
x=3sin(t)10cos(t) y=2cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x:8sin(t)cos(t) y:8cos(t)
x:7sin(t)cos(t) y:7cos(t)
x:6sin(t)cos(t) y:6cos(t)
x:5sin(t)cos(t) y:7cos(t)
x:4sin(t)cos(t) y:8cos(t)
x:2sin(t)cos(t) y:9cos(t)
x:8cos(t) y:8sin(t)cos(t)
x:7cos(t) y:7sin(t)cos(t)
x:6cos(t) y:6sin(t)cos(t)
x:7cos(t) y:5sin(t)cos(t)
x:8cos(t) y:4sin(t)cos(t)
x:9cos(t) y:2sin(t)cos(t)
0 <= T <= 2pi
Odgovor: Zadatak 01 - Krive u ravni
x=0.1cos(t)+tan(t)
y=2sin(t)*cos(t)
x=0.2cos(t)+tan(t)
y=3sin(t)*cos(2t)
x=0.3cos(t)+tan(t)
y=4sin(t)*cos(3t)
x=0.4cos(t)+tan(t)
y=5sin(t)*cos(4t)
x=0.5cos(t)+tan(t)
y=6sin(t)*cos(5t)
x=0.6cos(t)+tan(t)
y=7sin(t)*cos(6t)
x=0.7cos(t)+tan(t)
y=8sin(t)*cos(7t)
x=0.8cos(t)+tan(t)
y=9sin(t)*cos(8t)
x=0.9cos(t)+tan(t)
y=10sin(t)*cos(9t)
x=cos(t)+tan(t)
y=11sin(t)*cos(10t)
x=1.1cos(t)+tan(t)
y=12sin(t)*cos(11t)
Odgovor: Zadatak 01 - Krive u ravni
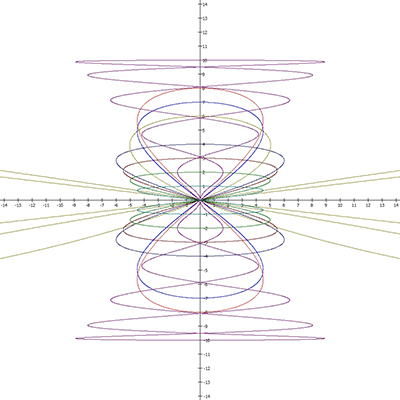
x=2sin(t)*6tan(2t); 4cos(5t)*2tan(t); 0<=t<=2pi
x=2sin(t)*5tan(2t); 4cos(5t)*2tan(t); 0<=t<=2pi
x=2sin(t)*4tan(2t); 4cos(5t)*2tan(t); 0<=t<=2pi
x=2sin(t)*3tan(2t); 4cos(5t)*2tan(t); 0<=t<=2pi
x=2sin(t)*2tan(2t); 4cos(5t)*2tan(t); 0<=t<=2pi
x=2sin(t)*tan(2t); 4cos(5t)*2tan(t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*7tan(2t)*cos(2t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*6tan(2t)*cos(2t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*5tan(2t)*cos(2t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*4tan(2t)*cos(2t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*3tan(2t)*cos(2t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*2tan(2t)*cos(2t); 0<=t<=2pi
x=4cos(5t)*2tan(t); 2sin(t)*tan(2t)*cos(2t); 0<=t<=2pi
x=10tan(2t)*cos(2t); 10sin(2t)*1.5cos(t); 0<=t<=2pi
x=10tan(2t)*1.5cos(2t); 10sin(2t)*2cos(t); 0<=t<=2pi
x=10tan(2t)*2cos(2t); 10sin(2t)*2.5cos(t); 0<=t<=2pi
x=10tan(2t)*2.5cos(2t); 10sin(2t)*3cos(t); 0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=15sin(t)15cos(t) y=15cos(t)
x=15sin(t)cos(t) y=15cos(t)
x=8sin(t) y=8cos(t)
x=8sin(t)cos(t) y=8cos(t) *
x=8sin(t)10cos(t) y=8cos(t)
x=10sin(t)cos(t) y=10cos(t)
x=12sin(t)cos(t) y=12cos(t)
x=15sin(t)15cos(t) y=15cos(t)
x=5sin(t)cos(t) y=5cos(t)
x=15cos(t)cos(t) y=15cos(t)
x=10sin(t) y=10cos(t)
x=8sin(t)8cos(t) y=8cos(t)
x=8sin(t)cos(t) y=8cos(t)
x=5sin(t)cos(t) y=5cos(t) *
x=5sin(t)cos(t) y=5cos(t)
x=7sin(t)cos(t) y=7cos(t)
x=4sin(t)cos(t) y=4cos(t)
x=9sin(t) y=9cos(t)
x=1sin(t) y=1cos(t)
x=3tan(t)cos(t) y=3cos(t)
x=4tan(t)*cos(t) y=4cos(t)
x=3tan(t)*cos(t) y=3cos(t)
x=2tan(t)*cos(t) y=2cos(t)
x=7sin(t)cos(t) y=7cos(t)
x=3sin(t)3cos(t) y=3cos(t)
x=4sin(t)4cos(t) y=4cos(t)
x=5sin(t)5cos(t) y=5cos(t)
x=7sin(t)7cos(t) y=7cos(t)
x=6sin(t)6cos(t) y=6cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x - sin(3t)cos(t)
y - 10cos(t)
x - 2sin(3t)cos(t)
y - 9cos(t)
x - 3sin(3t)cos(t)
y - 8cos(t)
x - 4sin(3t)cos(t)
y - 7cos(t)
x - 5sin(3t)cos(t)
y - 6cos(t)
x - 6sin(3t)cos(t)
y - 5cos(t)
x - 7sin(3t)cos(t)
y - 4cos(t)
x - 8sin(3t)cos(t)
y - 3cos(t)
x - 9sin(3t)cos(t)
y - 2cos(t)
x - 10 sin(3t)cos(t)
y - cos(t)
Odgovor: Zadatak 01 - Krive u ravni
X=2sin(t)*cos(t) Y=9sin(t)
X=3sin(t)*cos(t) Y=8sin(t)
X=4sin(t)*cos(t) Y=7sin(t)
X=5sin(t)*cos(t) Y=6sin(t)
X=6sin(t)*cos(t) Y=5sin(t)
X=7sin(t)*cos(t) Y=4sin(t)
X=8sin(t)*cos(t) Y=3sin(t)
X=9sin(t)*cos(t) Y=2sin(t)
x=3tan(t) y=3cos(t)
x=5tan(t) y=5cos(t)
x=7tan(t) y=7cos(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x = atan(t) , y = bcos(t)tan(t) , 0<t<2pi
a = b = 1
a = b = 2
a = b = 3
a = b = 4
a = b = 5
a = b = 6
a = b = 7
a = b = 8
a = b = 9
a = b = 10
Odgovor: Zadatak 01 - Krive u ravni
x_7sin(t)*cot(t) y_4tan(t)
7sin(t)*cot(t) 3/2tan(t)
7sin(t)*cot(t) 19/6tan(t)
7sin(t)*cot(t) 28/11tan(t)
7sin(t)*cot(t) 3tan(t)
7sin(t)*cot(t) 65/46tan(t)
7sin(t)*cot(t) 47/58 tan(t)
7sin(t)*cot(t) 9/59 tan(t)
sin(t)*cot(t) 3tan(t)
sin(t)*cot(t) 69/199tan(t)
sin(t)*cot(t) -5tan(t)
4sin(t)*cot(t) tan(t)
4sin(t)*cot(t) 2tan(t)
4sin(t)*cot(t) -3tan(t)
8sin(t)*cot(t) 3tan(t)
4sin*cos(t) 2cos(t)
4sin(t)*cos(t) -3tan(t)
Odgovor: Zadatak 01 - Krive u ravni
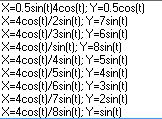
x=1sin(t)cos(t) y=0.5cos(t)
x=3sin(t)cos(t) y=1cos(t)
x=5sin(t)cos(t) y=1.5cos(t)
x=7sin(t)cos(t) y=2cos(t)
x=9sin(t)cos(t) y=2.5cos(t)
x=11sin(t)cos(t) y=3cos(t)
x=13sin(t)cos(t) y=3.5cos(t)
x=15sin(t)cos(t) y=4cos(t)
x=5sin(t)cos(t) y=3cos(t)
x=4sin(t)cos(t) y=3.5cos(t)
x=3sin(t)cos(t) y=4cos(t)
x=2sin(t)cos(t) y=4.5cos(t)
x=1sin(t)cos(t) y=5cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=15sin(t) y=15cos(t)
x=15sin(t) y=14cos(t)
x=15sin(t) y=13cos(t)
x=15sin(t) y=12cos(t)
x=15sin(t) y=11cos(t)
x=15sin(t) y=10cos(t)
x=14sin(t) y=10cos(t)
x=13sin(t) y=10cos(t)
x=12sin(t) y=10cos(t)
x=11sin(t) y=10cos(t)
x=10sin(t) y=10cos(t)
x=10sin(t) y=9cos(t)
x=10sin(t) y=8cos(t)
x=10sin(t) y=7cos(t)
x=10sin(t) y=6cos(t)
x=10sin(t) y=5cos(t)
x=9sin(t) y=5cos(t)
x=8sin(t) y=5cos(t)
x=7sin(t) y=5cos(t)
x=6sin(t) y=5cos(t)
x=5sin(t) y=5cos(t)
x=5sin(t) y=4cos(t)
x=5sin(t) y=3cos(t)
x=5sin(t) y=2cos(t)
x=5sin(t) y=1cos(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=4sin(t)*cos(3t)*tan(t); y=4cot(t)*sin(7t); 0<t<2pi
x=-4sin(t)*cos(3t)*tan(t); y=-4cot(t)*sin(7t); 0<t<2pi
x=5sin(t)*cos(3t)*tan(t); y=5cot(t)*sin(7t); 0<t<2pi
x=-5sin(t)*cos(3t)*tan(t); y=-5cot(t)*sin(7t); 0<t<2pi
x=6sin(t)*cos(3t)*tan(t); y=6cot(t)*sin(7t); 0<t<2pi
x=-6sin(t)*cos(3t)*tan(t); y=-6cot(t)*sin(7t); 0<t<2pi
x=2cos(t)*2tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*2.1tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*2.2tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*2.5tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*2.6tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*2.7tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*3tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*3.5tan(t); y=cos(t)*sin(t); 0<t<2pi
x=2cos(t)*4tan(t); y=cos(t)*sin(t); 0<t<2pi
Odgovor: Zadatak 01 - Krive u ravni
x=3tan(t);y=3cos(t)
x=3tan(t)cos(t);y=3cos(t)
x=5tan(t);y=5cos(t)
x=7tan(t);y=7cos(t)
x=9tan(t);y=9cos(t)
x=7tan(t)cos(t);y=7cos(t)
x=5tan(t)cos(t);y=5cos(t)
x=9tan(t)cos(t);y=9cos(t)
sve za 0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=cos(t)*sin(t); Y=8cos(t)*tan(t)
X=2cos(t)*sin(t); Y=8cos(t)*tan(t)
X=4cos(t)*sin(t); Y=8cos(t)*tan(t)
X=8cos(t)*sin(t); Y=8cos(t)*tan(t)
X=16cos(t)*sin(t); Y=8cos(t)*tan(t)
X=32cos(t)*sin(t); Y=8cos(t)*tan(t)
X=cos(t)*sin(t); Y=6cos(t)*tan(t)
X=2cos(t)*sin(t); Y=6cos(t)*tan(t)
X=4cos(t)*sin(t); Y=6cos(t)*tan(t)
X=8cos(t)*sin(t); Y=6cos(t)*tan(t)
X=16cos(t)*sin(t); Y=6cos(t)*tan(t)
X=cos(t)*sin(t); Y=4cos(t)*tan(t)
0 <= T <= 2Pi
Odgovor: Zadatak 01 - Krive u ravni
x=3cos(2t)*tan(t) y=2cos(t)*cos(2t)
x=5sin(t)*cos(t) y=3cos(t)*cos(2t)
x=3.5tan(t)*3.5sin(t) y=3.5cos(t)*3.5sin(t)
x=6tan(t)*10sin(t) y=10sin(t)*6cos(t)
x=28sin(t)*10cos(2t) y=10tan(t)*28sin(2t)
x=4.5tan(t)*4.6sin(t) y=4.5cos(t)*4.5sin(t)
x=8sin(2t)*cos(t) y=6cos(t)*cos(2t)
x=2.5tan(2t)*2.5sin(t) y=2.5cos(t)*2.5sin(2t)
x=5cos(2t)*tan(t) y=3cos(t)*cos(2t)
x=10sin(t)*tan(t) y=5cos(t)*cos(2t)
x=10cos(2t)*tan(t) y=5sin(t)*cos(2t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=3.1sin(t)*0.8cos(t) y=3.1cos(t)*0.8tan(t);
x=3.5sin(t)*0.8cos(t) y=3.5cos(t)*0.8tan(t);
x=3.9sin(t)*0.8cos(t) y=3.9cos(t)*0.8tan(t);
x=3*tan(2T) y=2*sin(6T)
x=1,7*tan(2T) 4*sin(2T)
x=3*tan(2T) 2*sin(2T)
x=2sin(t)cos(t) y=4.5cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=sin(6t)*cot(t), y=cos(3t)*tan(t), 0<=t<=2pi;
x=-sin(6t)*cot(t), y=cos(3t)*tan(t), 0<=t<=2pi;
x=sin(6t)*cot(t), y=1.25cos(3t)*tan(t), 0<=t<=2pi;
x=-sin(6t)*cot(t), y=1.25cos(3t)*tan(t), 0<=t<=2pi;
x=sin(6t)*cot(t), y=1.5cos(3t)*tan(t), 0<=t<=2pi;
x=-sin(6t)*cot(t), y=1.5cos(3t)*tan(t), 0<=t<=2pi;
x=sin(6t)*cot(t), y=1.75cos(3t)*tan(t), 0<=t<=2pi;
x=-sin(6t)*cot(t), y=1.75cos(3t)*tan(t), 0<=t<=2pi;
x=sin(6t)*cot(t), y=2cos(3t)*tan(t), 0<=t<=2pi;
x=-sin(6t)*cot(t), y=2cos(3t)*tan(t), 0<=t<=2pi;
x=sin(2t)*cos(10t), y=tan(2t)*sin(2t), 0<=t<=2pi;
x=tan(2t)*sin(2t), y=sin(2t)*cos(10t), 0<=t<=2pi;
x=sin(2t)*cos(10t), y=1.2tan(2t)*sin(2t), 0<=t<=2pi;
x=tan(2t)*sin(2t), y=1.2sin(2t)*cos(10t), 0<=t<=2p.
Odgovor: Zadatak 01 - Krive u ravni
X=8sin(t); Y=1cos(6t)*tan(6t) X=9sin(t); Y=2cos(6t)*tan(6t) X=10sin(t); Y=3cos(6t)*tan(6t) X=11sin(t); Y=4cos(6t)*tan(6t) X=12sin(t); Y=5cos(6t)*tan(6t) X=13sin(t); Y=6cos(6t)*tan(6t) X=14sin(t); Y=7cos(6t)*tan(6t)
Odgovor: Zadatak 01 - Krive u ravni
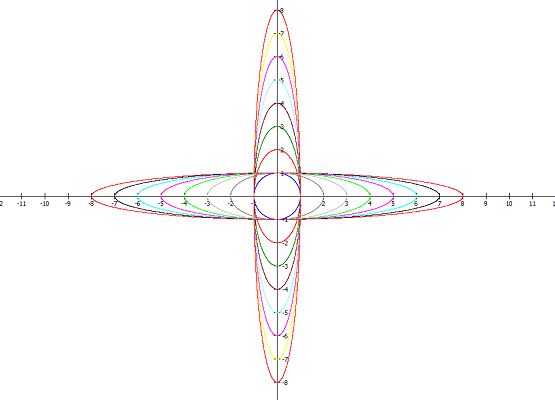
x=asint, y=bcost, 0<=t<=2pi
x=1 , y=1
x=1 , y=2
x=1 , y=3
x=1 , y=4
x=1 , y=5
x=1 , y=6
x=1 , y=7
x=1 , y=8
x=2 , y=1
x=3 , y=1
x=4 , y=1
x=5 , y=1
x=6 , y=1
x=7 , y=1
x=8 , y=1
Odgovor: Zadatak 01 - Krive u ravni
x=10tan(2t)*cos(2t); y=10sin(2t)*1.5cos(t); 0<=t<=2pi;
x=10tan(2t)*1.5cos(2t); y=10sin(2t)*2cos(t); 0<=t<=2pi;
x=10tan(2t)*2cos(2t); y=10sin(2t)*2.5cos(t); 0<=t<=2pi;
x=10tan(2t)*2.5cos(2t); y=10sin(2t)*3cos(t); 0<=t<=2pi;
x=2sin(t)4cos(t); y=2cos(t); 0<=t<=2pi;
x=4sin(t)6cos(t); y=4cos(t); 0<=t<=2pi;
x=2sin(t)8cos(t); y=8cos(t); 0<=t<=2pi;
x=2sin(t)2cos(t); y=10cos(t); 0<=t<=2pi;
x=3sin(t)10cos(t); y=2cos(t); 0<=t<=2pi;
x=4sin(t)12cos(t); y=2cos(t); 0<=t<=2pi;
x=7cos(t); y=tan(t); 0<=t<=2pi;
x=7cos(t); y=2tan(t); 0<=t<=2pi;
x=7cos(t); y=3tan(t); 0<=t<=2pi;
x=7cos(t); y=4tan(t); 0<=t<=2pi;
x=7cos(t); y=5tan(t); 0<=t<=2pi;
Odgovor: Zadatak 01 - Krive u ravni
0<=t<=2pi
x=sin(t)*cos(8t) y=tan(t)
x=sin(t)*cos(6t) y=tan(t)
x=sin(t)*cos(4t) y=tan(t)
x=sin(t)*cos(2t) y=tan(t)
x=tan(t) y=sin(t)*cos(2t)
x=tan(t) y=sin(t)*cos(4t)
x=tan(t) y=sin(t)*cos(6t)
x=tan(t) y=sin(t)*cos(8t)
Odgovor: Zadatak 01 - Krive u ravni
x=t; Y=sin(t)
X=3t; Y=cos(t)
X=3/2t; Y=sin(t)+cos(t)
X=ttt; Y=cos(2t)
X=2*tan(t)*3*sin(t);
Y=2*sin(t)*cos(t)*cos(5t)
X=4*tan(t)*3*sin(t);
Y=4*sin(t)*3*cos(t)*cos(5t)
od -6 do 6
Odgovor: Zadatak 01 - Krive u ravni
x=5cos(t) y=sin(2t)
x=2cos(t) y=2sin(2t)
x=5sin(2t) y=2cos(t)
x=sin(2t) y=5cos(2t)
x=2sin(2t) y=2cos(2t)
x=sin(t) y=cos(t)
x=3sin(t) y=2cos(t)
x=2sin(t) y=2tan(t)
x=sin(2t) y=2tan(2t)
x=6cos(t) y=2sin(2t)
x=2sin(2t) y=4tan(t)
x= -2sin(2t) y= -4tan(2t)
x=sin(t) y=5tan(2t)
Odgovor: Zadatak 01 - Krive u ravni
x=tsin(t) , y=9cos(t)
x=4.5sin(t)cos(t) , y=5.5cos(t)
x=5.sin(t)cos(t) , y=4.5cos(t)
x=1.9sin(t)cos(t) , y=2.2tan(t)
x=1.7sin(t)c0s(t) , y=2.4tan(t)
x=1.5sin(t)cos(t) , y=2.7tan(t)
x=2.0sin(t)cos(t) , y=4.4tan(t)
x=4.4sin(t) , y=3.3cos(t)
x=3.6sin(t) , y=3.2cos(t)
x=2.5sin(t)cos(t) ,y=2.2cos(t)
x=1.1sin(t)cos(t) ,y=1.5cos(t)
x=tan(t) , y=4tan(t)
x=2tan(t)cos(t) , y=6tan(t)
x=3.3tan(t)cos(t) , y=3tan(t)
x=2tan(t)sin(t) , y=2.2tan(t)
x=3tan(t)cos(t) , y=4tan(t)
x=1.9tan(t)sin(t) , y=3tan(t)
x=4.5sin(t)cos(t) , y=4cos(t)
x+4.6sin(t)cos(t) , y=3.5cos(t)
x=10sin(t)cos(t) , y=5.5cos(t)
x=9sin(t)cos(t) , y=4cos(t)
x=8.5sin(t)cos(t) , y=5cos(t)
x=12sin(t)cos(t) , y=5.7cos(t)
x=13.5sin(t)cos(t) , y=7cos(t)
x=14.5sin(t)cos(t), y=7.4cos(t)
x=14.7sin(t)cos(t) , y=8.5cos(t)
x=2sin(t)cos(t) , y=6cos(t)
x=15.3sin(t)cos(t) , y=6.3cos(t)
x=16sin(t)cos(t) , y=7cos(t)
x=17sin(t)cos(t) , y=7.5cos(t)
x=15.5sin(t)cos(t) , y=8cos(t)
x=19sin(t)cos(t) , y=8.5cos(t)
x=21.5sin(t)cos(t) , y=8.9cos(t)
x=23sin(t)cos(t) , y=9.5cos(t)
x=23sin(t)cos(t) , y=2.7tan(t)
x=22sin(t)cos(t) , y=4.4tan(t)
Odgovor: Zadatak 01 - Krive u ravni
x= tan(t)*cos(3t); y=tan(t)
x= tan(2t)*cos(4t); y=tan(t)
x= tan(t); y=sin(t)*cos(2t)
x= tan(t); y=sin(t)*cos(4t)
x= tan(t); y=sin(t)*cos(6t)
x= tan(t); y=sin(t)*cos(8t)
x= tan(t); y=sin(t)*cos(10t)

Odgovor: Zadatak 01 - Krive u ravni
y = abs (x) * sin (x) y = abs (x) * sin (x) * 1.2
y = abs (x) * sin (x) * 1.4 y = abs (x) * sin (x) * 1.6
y = abs (x) * sin (x) * 1.8 y = abs (x) * sin (x) * 2.0
y = abs (x) * sin (x) y = abs (x) * sin (x) * 1.2
y = abs (x) * sin (x) * 1.4 y = abs (x) * sin (x) * 1.6
y = abs (x) * sin (x) * 1.8 y = abs (x) * sin (x) * 2
y = 20 * x * x y = -20 * x * x
Odgovor: Zadatak 01 - Krive u ravni
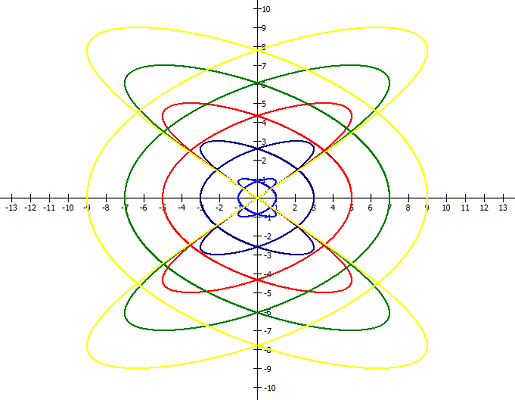
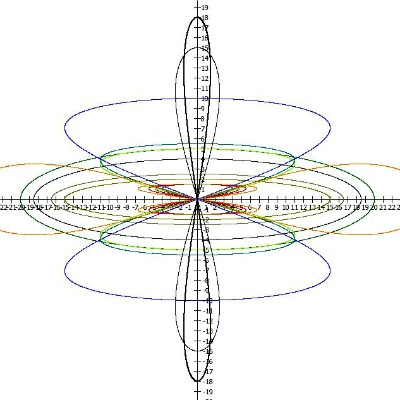
X=a*cos(t) Y=b*sin(t)
0<=t<=2pi
1. a=4 b=3
2. a=3 b=4
3. a=5 b=4
4. a=4 b=5
5. a=6 b=5
6. a=5 b=6
7. a=7 b=6
Odgovor: Zadatak 01 - Krive u ravni
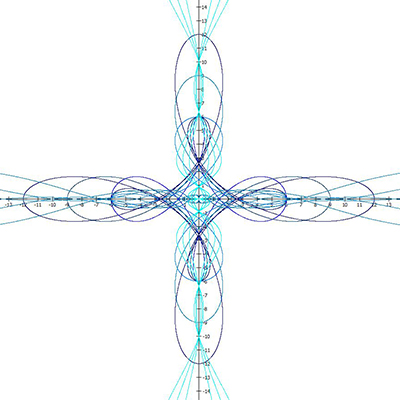
X= 11cos(t)sin(t) Y=1.5sin(t)
X=9.5cos(t)sin(t) Y=1.5sin(t)
X=8cos(t)sin(t) Y=1.5sin(t)
X=13.5cos(t) Y=15sin(t)
X=15cos(t) Y=2sin(t)
X=16.5cos(t) Y=2.5sin(t)
X=18.5sin(t) Y=4sin(t)
X=20sin(t) Y=5cos(t)
X=22sin(t)cos(t) Y=5sin(t)
X=22sin(t)cos(t) Y=5.5sin(t)
X=26sin(t) Y=7sin(t)cos(t)
X=30sin(t)cos(t) Y=10cos(t)
X=5sin(t)cos(t) Y=15cos(t)
X=3sin(t)*cos(t) Y=18cos(t)
0 < =T= < 2pi
Odgovor: Zadatak 01 - Krive u ravni
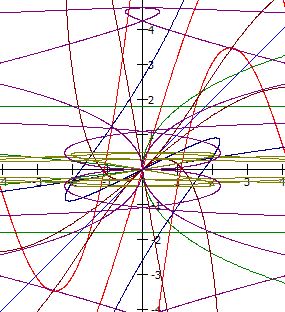
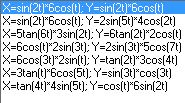
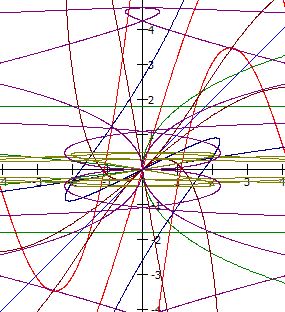
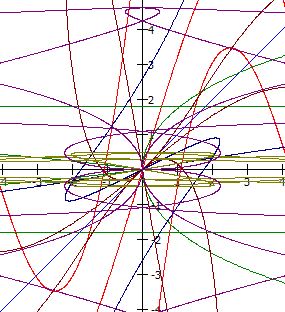
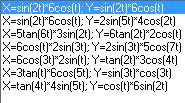
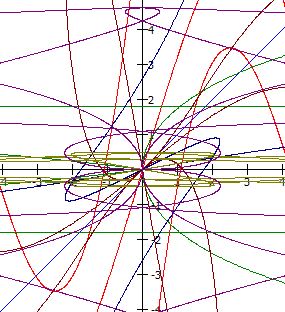
X=sin(2t)*6cos(t) Y= tan(t)
X=tan(3T) Y=sin(20T)
X=tan(t)sin(t) Y=8cos(t)8sin(t)
X=0.3sin(t)*0.3cos(t) Y= 0.3sin(t)*0.3cos(t)
X=2cos(3t)*tan(t) Y=2cos(t)*cos(2t)
X= 4tan(t)*4sin(t) Y=2cos(t)*2sin(t)
X=2cos(3t)*tan(t) Y=2cos(t)*cos(2t)
X= 2cos(3t)*tan(t) Y=3cos(t)*cos(2t)
X=2sin(t)cos(t) Y=8cos(t)
X=4.5sin(t)cos(t) Y=6cos(t)
X=1.5tan(t)*1.5sin(t) Y=1.5cos(t)*1.5sin(t)
Odgovor: Zadatak 01 - Krive u ravni
sin(2t)*cos(t),cos(t)*6tan(t)
cos(2t)*sin(t),6tan(t)*cos(t)
6tan(t)*cos(t),cos(2t)*sin(t)
5tan(t)*cos(t),2cos(2t)*sin(t)
4cos(t),5sin(t)*cos(t)
2cos(t),2sin(t)
5sin(t),6cos(t)*sin(t)
6sin(t),5cos(t)*sin(t)
7cos(t),5sin(t)*cos(t)
3cos(t),5sin(t)*cos(t)
2cos(t),4sin(t)*cos(t)
2sin(t),7cos(t)*sin(t)
8cos(t),5sin(t)*cos(t)
9cos(t),4sin(t)*cos(t)
10cos(t),3sin(t)*cos(t)
11cos(t),2sin(t)*cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x y
2cos(3t)*tan(t) ; tan(t)
3cos(3t)*tan(t) ; 2tan(t)
4cos(3t)*tan(t) ; 3tan(t)
5cos(3t)*tan(t) ; 4tan(t)
6cos(3t)*tan(t) ; 5tan(t)
7cos(3t)*tan(t) ; 6tan(t)
8cos(3t)*tan(t) ; 7tan(t)
9cos(3t)*tan(t) ; 8tan(t)
10cos(3t)*tan(t) ; 9tan(t)
11cos(3t)*tan(t) ; 10tan(t)
12cos(3t)*tan(t) ; 11tan(t)
13cos(3t)*tan(t) ; 12tan(t)
14cos(3t)*tan(t) ; 13tan(t)
15cos(3t)*tan(t) ; 14tan(t)
17cos(3t)*tan(t) ; 16tan(t)
Odgovor: Zadatak 01 - Krive u ravni
X=tan(t)sin(t) Y=2cos(t)
X=tan(t)sin(t) Y=2,2cos(t)
X=tan(t)sin(t) Y=2,5cos(t)
X=tan(t)sin(t) Y=3cos(t)
X=tan(t)sin(t) Y=3,7cos(t)
X=tan(t)sin(t) Y=5,2cos(t)
X=tan(t)sin(t) Y=-2cos(t)
X=tan(t)sin(t) Y=-2,2cos(t)
X=tan(t)sin(t) Y=-3cos(t)
X=tan(t)sin(t) Y=-3,7cos(t)
X=tan(t)sin(t) Y=-5,2cos(t)
X=tan(t) Y=2sin(t)
X=tan(t) Y=1,8sin(t)
X=tan(t) Y=1,6sin(t)
X=sin(t)cos(t) Y=sin(t)
X=2sin(t)cos(t) Y=2sin(t)
X=7sin(t)cos(t) Y=cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x- tan(t)*2sin(t) y- 2cos(t)*cos(3t)*sin(t)
x- 3tan(t)*4sin(t) y- 4cos(t)*cos(5t)*sin(3t)
x- 5tan(t)*6sin(t) y- 6cos(t)*cos(7t)*sin(5t)
x-2sin(8t) y- 6cos(6t)
x- 6sin(5t) y- cos(5t)
x- 12sin(T) y- 10cos(T)
x- 11sin(T) y- 11cos(T)
x- 10sin (T) y- 12cos(T)
Odgovor: Zadatak 01 - Krive u ravni
x=3cos(t) y=sin(t)*2cos(t)
x=4cos(t) y=sin(t)*2cos(t)
x=5cos(t) y=sin(t)*2cos(t)
x=6cos(t) y=sin(t)*2cos(t)
x=tan(t)*sin(t) y=cos(t)*sin(t)
x=2tan(t)*sin(t) y=cos(t)*sin(t)
x=4tan(t)*2sin(t) y=cos(t)*sin(t)
x=4sin(2t)*cos(2t) y=6sin(t)
x=5sin(2t)*cos(2t) y=5sin(t)
Odgovor: Zadatak 01 - Krive u ravni
X=2tan(t)*2sin(t) Y=2cos(t)*cos(4t)*sin(2t)
X=3tan(t)*3cos(t) Y=3cos(t)*sin(4t)*sin(2t)
X=3tan(t)*3sin(t)*sin(t) Y=4cos(t)*cos(4t)*cos(2t)
X=7tan(t)*3sin(t) Y=5cos(2t)*cos(t)*sin(t)
X=9cos(t)*2cos(t) Y=5sin(t)*cos(t)*sin(t)
X=2sin(t)*4sin(t) Y=5sin(t)*cos(t)*sin(t)
X=4sin(t)*2sin(2t) Y=5sin(t)*cos(t)*sin(2t)
X=6tan(t)*2sin(t) Y=3sin(t)*cos(t)*sin(t)
X=2tan(t)*2sin(t);Y=3cos(t)*cos(3t)*sin(3t)
X=5sin(t)*cos(5t)*sin(5t);Y=4tan(t)*4sin(t)
X=7tan(t)*cos(7t)*sin(7t);Y=5tan(t)*5sin(t)
X=7cos(t)*cos(7t)*sin(7t);Y=6tan(t)*6sin(t)
X=6cos(t)*cos(6t)*sin(6t)Y=6cos(t)*tan(t)
Odgovor: Zadatak 01 - Krive u ravni
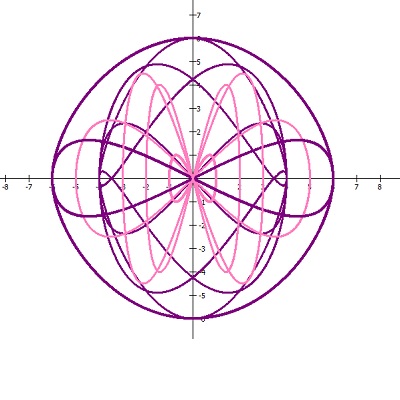
x= y=
5sin(t)+cos(5t) 5cos(t)+sin(5t)
3cos(t)+sin(t) 3sin(t)+cos(5t)
sin(t)+sin(t) cos(t)+cos(t)
7cos(t)+sin(7t) 7sin(t)+cos(7t)
5sin(t)+sin(5t) 5cos(t)+cos(5t)
9sint(t)+cos(9t) 9cos(t)+sin(9t)
7cos(t)+cos(7t) 7sin(t)+sin(7t)
0<=Т<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=-5sin(t)*cos(3t)*tan(t),y=-5cot(t)*sin(7t) ,0<=t<=2pi
X=5sin(t)*cos(3t)*tan(t),y=5cot(t)*sin(7t) ,0<=t<=2pi
X=11sin(t)*cos(3t)*tan(t),y=11cot(t)*sin(7t) ,0<=t<=2pi
X=-11sin(t)*cos(3t)*tan(t),y=-11cot(t)*sin(7t) ,0<=t<=2pi
X=2sin(2t), y= tan(t),0<= T<=2pi
X=2sin(3t), y=3tan(t),0<= T<=2pi
X=tan(t)*sin(t),y=-2cos(t)*sin(t),0<t<2pi
X=tan(t)*sin(t),y=4cos(t)*sin(t) ,0<t<2pi
x=8sin(t)*cos(t), y=29sin(t)*cos(t)*cos(t)*tan(t),0<=T<=pi
Odgovor: Zadatak 01 - Krive u ravni
X=1cos(t)sin(t) Y=10sin(t)
X=1.5cos(t)sin(t) Y=9.5sin(t)
X=2cos(t)sin(t) Y=9sin(t)
X=2.5cos(t)sin(t) Y=8.5sin(t)
X=3cos(t)sin(t) Y=8sin(t)
X=3.5cos(t)sin(t) Y=7.5sin(t)
X=4cos(t)sin(t) Y=7sin(t)
X=4.5cos(t)sin(t) Y=6.5sin(t)
X=5cos(t)sin(t) Y=6sin(t)
X=5.5cos(t)sin(t) Y=5.5sin(t)
X= 10sin(t) Y= 1cos(t)sin(t)
X= 9.5sin(t) Y= 1.5cos(t)sin(t)
X= 9sin(t) Y= 2cos(t)sin(t)
X= 8.5sin(t) Y=2.5 cos(t)sin(t)
X= 8sin(t) Y= 3cos(t)sin(t)
X= 7.5sin(t) Y= 3.5cos(t)sin(t)
X=7 sin(t) Y= 4cos(t)sin(t)
X= 6.5sin(t) Y= 4.5cos(t)sin(t)
X= 6sin(t) Y= 5cos(t)sin(t)
X= 5.5sin(t) Y= 5.5cos(t)sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x= sin(2t)*cos(t) y= tan(t)
x= sin(2t)*cos(t) y= tan(t)
x=tan(t) y= sin(2t)*5cos(t)
x=-1tan(t) y=14cos(t)tan(t)
x=tan(t) y= sin(t)*cos(4t)
x=2sin(8t) y= 10cos(T)
x=tan(t) y= sin(t)*cos(6t)
x= 2sin(t)4cos(t) y=4cos(t)
x=tan(t) y=5sin(t)*cos(t)
x=4tan(t) y= 4cos(t)
x=1.5tan(t)*1.5sin(t) y= 1.5cos(t)*1.5sin(t)
x=1.7tan(t)*1.7sin(t) y=1.7cos(t)*1.7sin(t)
x=1.9tan(t)*1.9sin(t) y= 1.9tan(t)*1.9sin(t)
x= 2tan(4t) y=2sin(3t)
Odgovor: Zadatak 01 - Krive u ravni
X=cos(t)sin(6t) y=sin(2t)
X=1cos(t)sin(6t) y=10sin(2t)
X=2cos(t)sin(6t) y=9sin(2t)
X=3cos(t)sin(6t) y=8sin(2t)
X=4cos(t)sin(6t) y=7sin(2t)
X=5cos(t)sin(6t) y=6sin(2t)
X=6cos(t)sin(6t) y=5sin(2t)
X=7cos(t)sin(6t) y=4sin(2t)
X=8cos(t)sin(6t) y=3sin(2t)
X=9cos(t)sin(6t) y=2sin(2t)
X=10cos(t)sin(6t) y=1sin(2t)
Odgovor: Zadatak 01 - Krive u ravni
x=1cos(3t)*tan(t) y=2cos(t)*1cos(2)
x=1cos(3t)*tan(t) y=4cos(t)
x=3cos(t)*2cos(2t), y=3cos(3t)*tan(t)
x=5sin(t)1cos(t), y=3cos(t)
x=1cos(3t)*tan(t) y=8cos(t)
x=5sin(t) y=3sin(t)cos(t)
Odgovor: Zadatak 01 - Krive u ravni
11sin(t) 2sin(t)cos(t)10sin(t) 3sin(t)cos(t) 9sint 4sintcost 8sint 5sintcost 7sint 6sintcost 6sint 7sintcost 5sint 8sintcost
4sint 9sintcost
11sintcost 2sint
10sintcost 3sint
9sintcost 4sint
8sintcost 5sint
7sintcost 6sint
6sintcost 7sint
5sintcost 8sint
4sintcost 9sint
3sintcost 10sint
2sintcost 11sint

Odgovor: Zadatak 01 - Krive u ravni
X=tan(t)*sin(t)
Y=tan(t)*cos(2t)
X=tan(t)*sin(t)
Y=tan(t)*cos(3t)
X=tan(t)*sin(t)
Y=tan(t)*cos(4t)
X=tan(t)*sin(t)
Y=tan(t)*cos(5t)
X=tan(t)*sin(t)
Y=tan(t)*cos(6t)
X=tan(t)*sin(t)
Y=tan(t)*cos(7t)
X=tan(t)*sin(t)
Y=tan(t)*cos(8t)
X=tan(t)*sin(t)
Y=tan(t)*cos(9t)

Odgovor: Zadatak 01 - Krive u ravni
X=2cos(t) - cos (80t) sin(t);
Y=2sin(t) - sin (80t)
X=4cos(t) - cos (80t);
Y=4sin(t) - sin(80t)
X=2cos(t) - cos (80t) sin(t);
Y=2sin(t) - sin (80t)
X=4cos(t) - cos (80t);
Y=4sin(t) - sin(80t)
Odgovor: Zadatak 01 - Krive u ravni
y=sin(2t)*cos(t); x=tan(5t); 0<t<2pi
x=3tan(t)*3sin(t); y=3cos(t)*sin(t)*cos(t); 0<t<2pi
x=sin(4t)*cos(3t); y=tan(2t); 0<t<2pi
x=sin(2t)*7cos(t); y=tan(t); 0<t<2pi
x=tan(t)*2sin(t); y=2cos(t)*cos(3t)*sin(t); 0<t<2pi
x=6tan(t)*7sin(t); y=7cos(t)*sin(2t)*cos(8t); 0<t<2pi
x=6cos(t)*sin(4t); y=tan(4t)*sin(4t); 0<t<2pi
x=3tan(t)*3sin(t); y=3cos(t)*sin(t)*cos(5t); 0<t<2pi
x=cos(t)*sin(t); y=tan(t)*sin(t); 0<t<2pi
x=tan(t)*2sin(t); y=2cos(t)*cos(3t)*sin(t); 0<t<2pi
x=3tan(2t)*6sin(t); y=3cos(t)*5sin(t)*cos(7t); 0<t<2pi
x=tan(t)*2sin(t); y=2cos(t)*cos(3t)*sin(t); 0<t<2pi
x=8tan(t)*9sin(t); y=9cos(t)*sin(5t)*cos(9t); 0<t<2pi
x=7tan(t)*8sin(t); y=8cos(t)*sin(3t)*cos(9t); 0<t<2pi
Odgovor: Zadatak 01 - Krive u ravni
x=1/2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=3/2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=3tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=4tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=5tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=6tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=7tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=8tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=1/2tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=10tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
x=15tsin(t)cos(t); y=tan(t)sin(t); 0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=sin(T)*cos(T); Y=tan(T)
X=2sin(T)*cos(T); Y=tan(T)
X=3sin(T)*cos(T); Y=tan(T)
X=-sin(T)*cos(T); Y=tan(T)
X=-2sin(T)*cos(T);Y=tan(T)
X=-3sin(T)*cos(T);Y=tan(T)
X=tan(T); Y=sin(T)*cos(T)
X=tan(T); Y=2sin(T)*cos(T)
X=tan(T); Y=3sin(T)*cos(T)
X=-tan(T); Y=sin(T)*cos(T)
X=-tan(T); Y=2sin(T)*cos(T)
X=-tan(T); Y=3sin(T)*cos(T)
Odgovor: Zadatak 01 - Krive u ravni
X=tan(t)*2sin(t) Y=sin(2t)*2cos(2t) pi<=T<=pi
X=tan(t)*2sin(t) Y=sin(2t)*2cos(2t) pi<=T<=2pi
x=tan(t)*2sin(t) y=0,5sin(2t)*2cos(2t) pi<=T<=2pi
x=tan(t)*2sin(t) y=1,5sin(2t)*2cos(2t) pi<=T<=2pi
x=tan(t)*2sin(t) y=1,25sin(2t)*2cos(2t) pi<=T<=2pi
x=tan(t)*2sin(t) y=0,75sin(2t)*2cos(2t) pi<=T<=2pi
x=tan(t)*2sin(t) y=0,25sin(2t)*2cos(2t) pi<=T<=2pi
x=sin(2t)*2cos(2t) y=tan(t)*2sin(t) pi<=T<=2pi
x=2sin(2t)*2cos(2t) y=0,5tan(t)*2sin(t) pi<=T<=2pi
x=3sin(2t)*2cos(2t) y=1,5tan(t)*2sin(t) pi<=T<=2pi
x=1,5sin(2t)*2cos(2t) y=1,25tan(t)*2sin(t) pi<=T<=2pi
x=2,75sin(2t)*2cos(2t) y=1,75tan(t)*2sin(t) pi<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)cos(t) y=3cos(t)
x=3sin(t)cos(t) y=3cos(t)
x=2sin(t)cos(t) y=cos(t)
x=3sin(t)cos(t) y=cos(t)
x=4sin(t)cos(t) y=cos(t)
x=2sin(t)cos(t) y=5cos(t)
x=sin(t)cos(t) y=5cos(t)
x=3sin(t)cos(t) y=cos(t)
Odgovor: Zadatak 01 - Krive u ravni
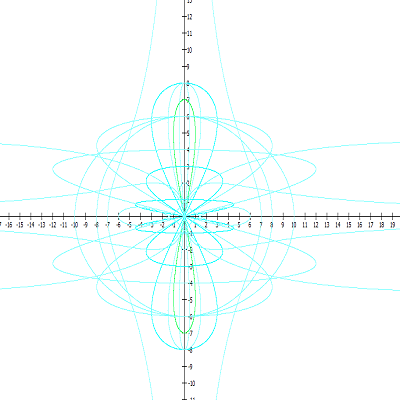
0 <= T <= 2pi
1) X=2*sin(3T) Y=5*cos(T)*sin(T)
2) X=4*sin(2T) Y=2,6*cos(4T)*sin(T)
3) X=7*sin(T) Y=3*cos(4T)*sin(2T)
4) X=2*sin(2T) Y=2*cos(3T)*sin(2T)
5) X=5*sin(2T) Y=4*cos(2T)*sin(5T)
Odgovor: Zadatak 01 - Krive u ravni
x=tsin(t0cos(t)
x=2sin(t)cos(t) y= 9cos(t)
x=4sin(t)cos(t) y= 8cos(t)
x=6sin(t)cos(t) y= 7cos(t)
x=8sin(t)cos(t) y= 6cos(t)
x=10sin(t)cos(t) y= 5cos(t)
Odgovor: Zadatak 01 - Krive u ravni
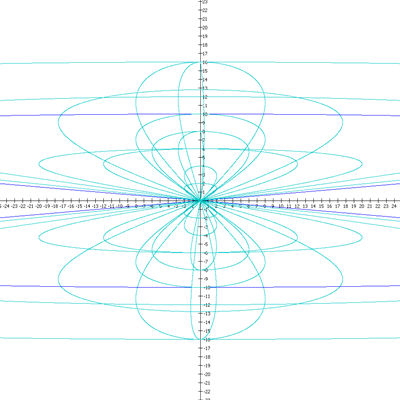
x=2tcos(3t) y=2tsin(t)
x=-2tcos(3t) y=-2tsin(t)
x=3tcos(3t) y=3tsin(t)
x=-3tcos(3t) y=-3tsin(t)
x=4tcos(3t) y=4sin(t)
x=4tcos(3t) y=-4sin(t)
x=5cos(3t) y=5tsin(t)
x=-5cos(3t) y=-5tsin(t)
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X= 10sin(2t)cos(2t) Y= 2cos(2t)
X= 11sin(3t)cos(3t) Y= 3cos(3t)
X= 12sin(4t)cos(4t) Y= 4cos(4t)
X= 9sin(t)6cos(6t) Y= 6cos(6t)
X= 9sin(7t)cos(7t) Y= 7cos(7t)
X= 9sin(8t)cos(8t) Y= 8cos(8t)
X= 9sin(t10)cos(t) Y= 10cos(t)
X= 9sin(12t)cos(12t) Y= cos(12t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=-5sin(t)*cos(3t)*tan(t) y=-5cot(t)*sin(7t)
X=5sin(t)*cos(3t)*tan(t) y=5cot(t)*sin(7t)
X=5sin(t)*cos(3t)*tan(t),y=5cot(t)*sin(7t)
X=-5sin(t)*cos(3t)*tan(t),y=-5cot(t)*sin(7t)
X=6sin(t)*cos(3t)*tan(t) Y=6cot(t)*sin(7t)
X=-6sin(t)*cos(3t)*tan(t) Y=-6cot(t)*sin(7t)
X=10tan(t)*sin(5t) Y=5cos(5t)*8cos(5t)*sin(7t)
X=11tan(t)*sin(5t) Y=6cos(5t)*8cos(5t)*sin(7t)
X=12tan(t)*sin(5t) Y=7cos(5t)*8cos(5t)*sin(7t)
X=13tan(t)*sin(5t) Y=8cos(5t)*8cos(5t)*sin(7t)
X=14tan(t)*sin(5t) Y=9cos(5t)*8cos(5t)*sin(7t)
X=15tan(t)*sin(5t) Y=10cos(5t)*8cos(5t)*sin(7t)
X=16tan(t)*sin(5t) Y=11cos(5t)*8cos(5t)*sin(7t)
X=17tan(t)*sin(5t) Y=12cos(5t)*8cos(5t)*sin(7t)
X=18tan(t)*sin(5t) Y=13cos(5t)*8cos(5t)*sin(7t)
X=19tan(t)*sin(5t) Y=14cos(5t)*8cos(5t)*sin(7t)
X=2013tan(t)*sin(5t) Y=158cos(5t)*8cos(5t)*sin(7t)
Odgovor: Zadatak 01 - Krive u ravni
X=5cost y=5sint
x=2cos3t*tant y=2cost*cos2t
x=6sint*cost y=4tant
x=3tant*3sint y=3cost*3sint
x=5sint*cost y=10cost
x=tan5t y=sin3t
x=tant y=sint*3cost
Odgovor: Zadatak 01 - Krive u ravni
0 <= T <= 2pi
x=2*tan(2T), y=3*sin(3T)*cos(2T);
x=5*tan(T), y=5*sin(3T)*cos(2T);
x=3*tan(T), y=2*sin(3T)*cos(4T);
x=8*tan(2T), y=4*sin(3T)*cos(4T);
Re: Zadatak 01 - Krive u ravni
x=4*sin(4T), y=6*sin(3T)*cos(4T)
x=2*sin(2T), y=8*sin(2T)*cos(2T)
x=1*sin(T), y=2*cos(T)*sin(T)
x=5*sin(T), y=5*sin(T)*cos(T)
6*sin(2T), y=6*cos(2T)*sin(T)
x=3*sin(3T), y=9*sin(3T)*cos(3T)
granice parametara: 0<=T<= 2pi
Odgovor: Zadatak 01 - Krive u ravni
x = a sin(t)/cos(t)
y=cos(t)/ b sin(t)
a=1 b=1
a=5 b=5
a=2 b=2
a=3 b=1
a=1 b=3
a=10 b=8
0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
X=6sin(t)*sin(3t)*cos(8t) Y=7sin(3t) 0<=T<=2pi
X=2sin(t)*2tan(t) Y=cos(4t)*sin(2t) 0<=T<=2pi
X=3sin(t)*2tan(t) Y=cos(t)*sin(t) 0<=T<=2pi
X=5sin(t)*cos(t) Y=7sin(t)*2tan(t) 0<=T<=2pi
X=3sin(t)*cos(5t) Y=2tan(4t)*2cos(t) 0<=T<=2pi
X=sin(2t)*tan(4t) Y=sin(t)*cos(2t) 0<=T<=2pi
X=sin(5t)*tan(4t) Y=tan(5t)*cos(2t) 0<=T<=2pi
X=tan(t)*2sin(t) Y=2cos(t)*cos(3t)*sin(2t) 0<=T<=2pi
X=9tan(t)*11sin(t) Y=10cos(t)*sin(7t)*cos(10t) 0<=T<=2pi
X=12sin(2t) Y=15sin(t)*cos(2t)*6sin(2t) 0<=T<=2pi
X=5sin(5t)*2cos(3t) Y=3cot(5t)*8sin(t) 0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)cos(t) y=3cos(t)
x=3sin(t)cos(t) y=3cos9t)
x=2sin(t)cos(t) y=cos(t)
x=2sin(3t) y=5cos(t)sin(t)
x=4sin(2t) y=2cos(4t)sin(t)
x=6sin(t)cos(t) y=7cos(t)
x=8sin(t)cos(t) y=6cos9t)
Odgovor: Zadatak 01 - Krive u ravni
x=2tan(2)2sin(t); y=6cos(t)6sin(t)
x=sin(4t)cos(t); y=9cos(t)
x=3sin(3t)cos(t); y=8cos(t)
x=5sin(3t)cos(t); y=10cos(t)
x=6sin(3t)cos(t); y=8cos(t)
x=7sin(3t)cos(t); y=2cos(t)
x=10sin(3t)cos(t); y=4cos(t)
x=3sin(3t)cos(t); y=2cos(t)
x=6sin(3t)cos(t); y=2cos(t)
x=4sin(3t)cos(t); y=6cos(t)
x=8sin(3t)cos(t); y=4cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)6cos(t) y=3sin(t)
x=5sin(t)7cos(t) y=sin(t)
x=4sin(t)2cos(t) y=3sin(t)
x=3sin(t)5cos(t) y=sin(t)
x=2sin(t)9cos(t) y=2sin(t)
x=sin(t)3cos(t) y=5sin(t)
x=6sin(t)8cos(t) y=7sin(t)
x=9sin(t)4cos(t) y=2sin(t)
x=8sin(t)7cos(t) y=8sin(t)
x=7sin(t)5cos(t) y=sin(t)
x=2sin(t)4cos(t) y=6sin(t)
0<=T<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*2sin(t) y=2cos(t)*cos(3t)*sin(t)
x=3tan(t)*4sin(t) y=4cos(t)*cos(5t)*sin(3t)
x=5tan(t)*6sin(t) y=6cos(t)*cos(7t)*sin(5t)
x=sin(32t)*cos(t) y=32*tan(t)*sin(t)
x=7tan(t)*8sin(t) y=8cos(t)*cos(9t)*sin(7t)
Odgovor: Zadatak 01 - Krive u ravni
x= 10cos(5t)*sin(t), y=cos(t)*tan(5t)
x=cos(t)*tan(5t), y=5cos(5t)*5sin(t)
x=2tan(t)sin(t), y=cos(t)sin(2t)
x=10tan(2t)*cos(2t), y=10sin(2t)*1.5cos(t)
x=5tan(t)*sin(t), y=5cos(t)*sin(2t)
x=5tan(2t)*2cos(2t), y=5sin(2t)*2.5cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=6sin(t)cos(t) y=8cos(t)
x=10cos(t) y=6sin(t)
x=2sin(t)cos(t) y=7cos(t)
x=7sin(t)cos(t) y=3cos(t)
x=9sin(t)cos(t) y=cos(t)
x=2cos(3t)tan(t) y=2cos(t)cos(2t)
x=7cos(t) y=5tan(t)
x=6tan(t)6sin(t) y=3cos(t)3sin(t)
x=3sin(t)cos(t) y=8sin(t)
x=cos(t)sin(t) y=8cos(t)tan(t)
x=16cos(t)sin(t) y=6cos(t)tan(t)
x=8sin(t) y=6cos(t)
x=4sin(t)6cos(t) y=4cos(t)
x=2tan(t)2sin(t) y=2cos(t)2sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)cos(t) y=8cos(t)
x=4sin(t)cos(t) y=6cos(t)
x=6sin(t)cos(t) y=4cos(t)
x=8sin(t)cos(t) y=2cos(t)
x=tan(t)*sin(t) y=-2cos(t)*sin(t)
x=tan(t)*sin(t) y=-4cos(t)*sin(t)
x=tan(t)*sin(t) y=-6cos(t)*sin(t)
x=tan(t)*sin(t) y=-8cos(t)*sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x=2cos(t)tan(t) y=2tan(t)
x=3cos(t)tan(t) y=3tan(t)
x=4cos(t)tan(t) y=4tan(t)
x=5cos(t)tan(t) y=5tan(t)
x=6cos(t)tan(t) y=6tan(t)
x=7cos(t)tan(t) y=7tan(t)
x=8cos(t)tan(t) y=8tan(t)
x=9cos(t)tan(t) y=9tan(t)
x=10cos(t)tan(t) y=10tan(t)
x=11cos(t)tan(t) y=11tan(t)
x=12cos(t)tan(t) y=12tan(t)
x=13cos(t)tan(t) y=13tan(t)
x=14cos(t)tan(t) y=14tan(t)
x=15cos(t)tan(t) y=15tan(t)
x=16cos(t)tan(t) y=16tan(t)

Odgovor: Zadatak 01 - Krive u ravni
x=4cos(t) y=8sin(t)cos(t)
x=4cos(t) y=7,5sin(t)cos(t)
x=4cos(t) y=7sin(t)cos(t)
x=4cos(t) y=6,5sin(t)cos(t)
x=4cos(t) y=6sin(t)cos(t)
x=4cos(t) y=5,5sin(t)cos(t)
x=4cos(t) y=5sin(t)cos(t)
x=7cos(t) y=5sin(t)cos(t)
x=8cos(t) y=5sin(t)cos(t)
x=3sin(t)cos(t) y=4,5sin(t)
x=3sin(t)cos(t) y=5sin(t)
0<t<2pi
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)cos(t) y=cos(t)sin(t)
x=3sin(t)cos(t) y=2cos(t)sin(t)
x=4sin(t)cos(t) y=3cos(t)sin(t)
x=5sin(t)cos(t) y=4cos(t)sin(t)
x=6sin(t)cos(t) y=5cos(t)sin(t)
x=7sin(t) y=6cos(t)
x=8sin(t)12cos(t) y=11sin(t)
x=9sin(t)13cos(t) y=12sin(t)
x=14sin(t)cos(t) y=13cos(t)
x=20sin(t)cos(t) y=19cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=3sin(t)cost y=3cos(t)
x=4sin(t)cost y=4cos(t)
x=5sin(t)cos(t) y=5cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=4sin(4t); y=6sin(3t)cos(4t)
x=6sin(t)cos(t); y=8cos(t)
x=2sin(t)cos(t); y=8cos(t)
x=4cos(t); y=5sin(t)cos(t)
x=3sin(t)cos(t); y=5sin(t)
x=tan(t)sin(t); y=-2cos(t)sin(t)
x=2tan(t)2sin(t); y=2cos(t)2sin(t)
x=2tan(t)sin(t); y=cos(t)sin(2t)
Odgovor: Zadatak 01 - Krive u ravni
X=3tan(t)*4sin(t)*sin(t) Y=4cos(t)*cos(5t)*sin(3t)
X=4tan(t)*4sin(t)*sin(t) Y=6cos(t)*cos(5t)*sin(3t)
X=6tan(t)*4sin(t)*sin(t) Y=8cos(t)*cos(5t)*sin(3t)
X=2tan(t)*3sin(t) Y=3cos(t)*cos(4t)*sin(2t)
X=3tan(t)*3sin(t) Y=4cos(t)*cos(4t)*sin(2t)
X=3tan(t)*3sin(t) Y=5cos(t)*cos(4t)*sin(2t)
X=10cos(t)*2sin(t) Y=10sin(2t)*cos(t)
X=12cos(t)*2sin(t) Y=12sin(2t)*cos(t)
X=12cos(t)*2sin(t) Y=14sin(2t)*cos(t)
X=12cos(t)*2sin(t) Y=17sin(2t)*cos(t)
Odgovor: Zadatak 01 - Krive u ravni
X=8sin(t2) Y=6sin(y3)
X=7sin(t2) Y=5sin(t3)
X=6sin(t2) Y=4sin(t3)
X=5sin(t2) Y=3sin(t3)
X=4sin(t2) Y=2sin(t3)
X=3sin(t2) Y=1sin(t3)
X=9sin(t) Y=9cos(t)
X=8sin(t) Y=8cos(t)
X=7sin(t) Y=7cos(t)
X=10sin(t) Y=9cos(t)
X=11sin(t) Y=8cos(t)
X=12sin(t) Y=7cos(t)

Odgovor: Zadatak 01 - Krive u ravni
x=-sin(6t)cot(t)cos(2t), y=2cos(3t)tan(4t); 0=t=pi
x=-2cos(3t)tan(4t), y=sin(6t)cot(t)cos(2t); 0=t=pi
x=sin(6t)cot(t)cos(2t), y=2cos(3t)tan(4t); 0=t=pi
x=-2cos(3t)tan(4t), y=-sin(6t)cot(t)cos(2t); 0=t=pi
x=3sin(t)cos2(t), y=3tan(3t), 0=t=2pi
x=sin(t)cos(4t), y=tan(2t), 0=t=2pi
x=tan(t), y=sin(t)cos(4t), 0=t=2pi
x=2tan(t), y=2sin(t)cos(4t), 0=t=2pi
x=5tan(t), y=5sin(t)cos(4t), 0=t=2pi
x=tan(t)2sin(t), y=2cos(t)cos(3t)sin(t); 0=t=pi
x=6tan(2t)5sin(t), y=8cos(t)cos(6t)sin(4t); 0=t=pi
x=4tan(2t)5sin(t), y=9cos(t)cos(6t)sin(4t); 0=t=pi
Odgovor: Zadatak 01 - Krive u ravni
x(t)= tcos(t); y(t)= 3cos(2t)+ 3; -2pi<=t<=2pi
x(t)= tcos(t); y(t)=2.5cos(2t)+2.5; -2pi<=t<=2pi
x(t)= tcos(t); y(t)= 2cos(2t)+ 2; -3pi<=t<=3pi
x(t)= tcos(t); y(t)=1.5cos(2t)+1.5; -2pi<=t<=2pi
x(t)=0.8tcos(t); y(t)= 1cos(2t)+ 1; -2pi<=t<=2pi
x(t)= sin(t); cos(t)- 1; 0<=t<=2pi
x(t)=0.8sin(t); 0.8cos(t)-2.8; 0<=t<=2pi
x(t)=0.5sin(t); 0.5cos(t)-4.1; 0<=t<=2pi
Odgovor: Zadatak 01 - Krive u ravni
x=sin(t)*cos(t); y=tan(t)*sin(t)
x=tan(t)*2sin(t); y=2cos(t)*cos(3t)*sin(t)
x=cos(2t)*tan(t); y=cos(2t)*cos(t)
x=sin(2t)*cos(t); y=2*tan(t)*sin(t)
x=2tan(2t); y=3cos(3t)
x=sin(3t)*3cos(t);y=tan(3t)*3cos(t)
x=3sin(t); y=2cos(t)*3sin(t)
x=2cos(t); y=2cos(t)*2sin(t)
x=2cos(t); y=2sin(t)*4cos(t)
x=4sin(t); y=4sin(t)*4cos(t)
x=12cos(t); y=12cos(t)*2sin(t)
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)*2tan(t) y=cos(t)*4sin(t)
x=2sin(t)*2tan(t) y=cos(t)*6sin(t)
x=2sin(t)*2tan(t) y=cos(t)*8sin(t)
x=2sin(t)*2tan(t) y=cos(t)*8,5sin(t)
x=2sin(t)*2tan(t) y=cos(t)*9sin(t)
x=2sin(t)*2tan(t) y=cos(t)*9,5sin(t)
x=2sin(t)*2tan(t) y=cos(t)*10sin(t)
x=cos(t)*2sin(t) y=3,5cos(t)*tan(t)
x=cos(t)*2sin(t) y=4cos(t)*tan(t)
x=1,5cos(t)*2sin(t) y=4,5cos(t)*tan(t)
x=2cos(t)*2sin(t) y=5cos(t)*tan(t)
x=2,5cos(t)*2sin(t) y=5,5cos(t)*tan(t)
x=3cos(t)*2sin(t) y=6cos(t)*tan(t)
x=3cos(t)*2sin(t) y=6,5cos(t)*tan(t)
x=3cos(t)*2sin(t) y=7cos(t)*tan(t)
Odgovor: Zadatak 01 - Krive u ravni
x = asint; y = bcost
a=10; b=10
a=10,5; b=9,5
a=11; b=9
a=11,5; b=8,5
a=12; b=8
a=12,5; b=7,5
a=13; b=7
a=13,5; b=6,5
a=14; b=6
a=14,5; b=5,5
a=15; b=5
a=15,5; b=4,5
a=16; b=4
x = asint*cott; y = 1/2tant
a=9
a=10
a=11
a=12
a=13
a=14
a=15
x = tant*sint; acost*sint
a=2
a=2,5
a=3
a=3,5
a=4
0 <= t <= 2pi
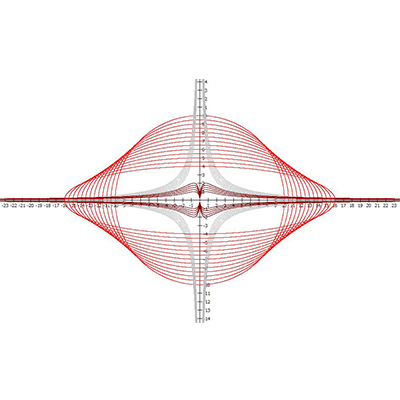
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*2sin(t) ; y=sin(t)*cos(t)
x=tan(t)*4sin(t) ; y=sin(t)*cos(t)
x=tan(t)*4sin(t) ; y=2sin(t)*cos(t)
x=tan(t)*4sin(t) ; y=6sin(t)*cos(t)
x=tan(t)*4sin(t) ; y=5sin(t)*cos(t)
x=8cos(t) ; y=5sin(t)cos(t)
x=10cos(t) ; y=8sin(t)cos(t)
x=4cos(t) ; y=2.5sin(t)cos(t)
x=sin(32t)*cos(t) ; y=32*tan(t)*sin(t)
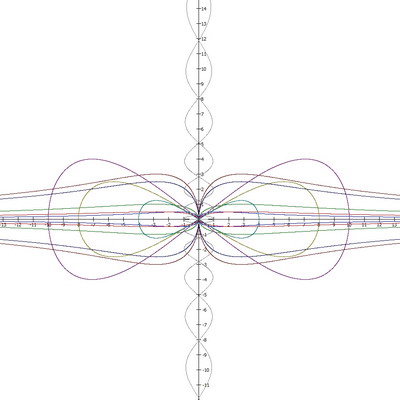
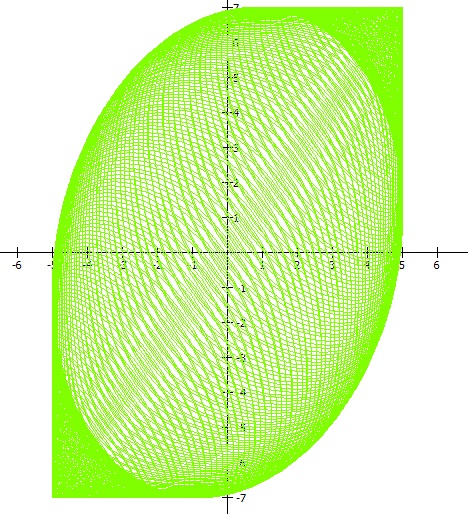

Odgovor: Zadatak 01 - Krive u ravni
x=10cos(5t) y=20tan(2t)
x=9cos(5t) y=20tan(2t)
x=8cos(5t) y=20tan(2t)
x=7cos(5t) y=20tan(2t)
x=6cos(5t) y=20tan(2t)
x=5cos(5t) y=20tan(2t)
x=4cos(5t) y=20tan(2t)
x=3cos(5t) y=20tan(2t)
x=2cos(5t) y=20tan(2t)
x=1cos(5t) y=20tan(2t)
x=20tan(2t) y=10cos(5t)
x=20tan(2t) y=9cos(5t)
x=20tan(2t) y=8cos(5t)
x=20tan(2t) y=7cos(5t)
x=20tan(2t) y=6cos(5t)
x=20tan(2t) y=5cos(5t)
x=20tan(2t) y=4cos(5t)
x=20tan(2t) y=3cos(5t)
x=20tan(2t) y=2cos(5t)
x=20tan(2t) y=1cos(5t)
x=cos(t) y=sin(t)
x=2cos(t) y=2sin(t)
x=3cos(t) y=3sin(t)
x=4cos(t) y=4sin(t)
x=5cos(t) y=5sin(t)
x=6cos(t) y=6sin(t)
x=7cos(t) y=7sin(t)
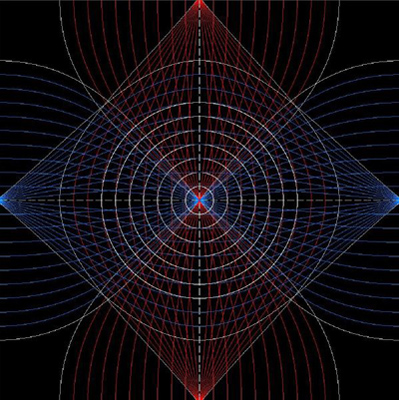
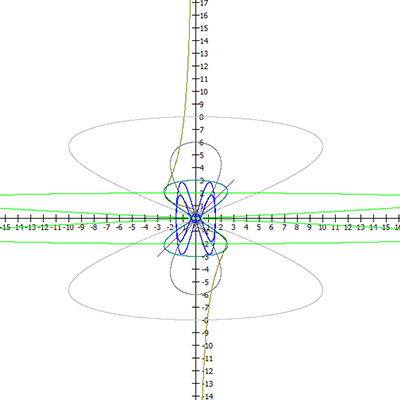
Odgovor: Zadatak 01 - Krive u ravni
x=3sin(t)cos(t)
x=5cos(t)
x=7sin(t)cos(t)
x=2tan(t)sin(t)
x=4tan(t)4sin(t)
x=6tan(t)2sin(t)
y=9cos(t)
y=7sin(t)cos(t)
y=5sin(t)
y=-2cos(t)sin(t)
y=4cos(t)4sin(t)
y=cos(t)sin(2t)
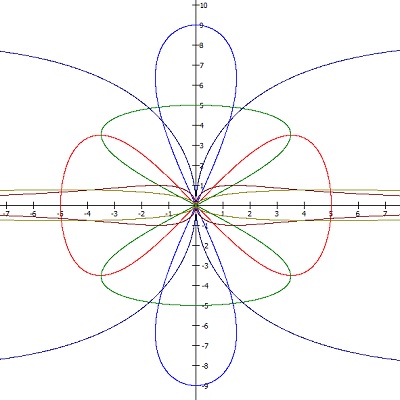
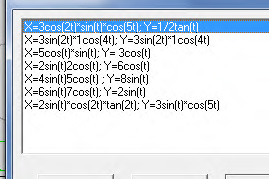

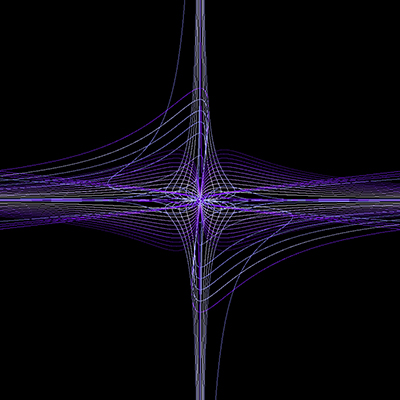
Odgovor: Zadatak 01 - Krive u ravni
x= 3tan(t)*4sin(t) y=6cos(t)*cos(5t)*sin(3t)
x= 6tan(t)*7sin(t)*sin(t) y=3cos(t)*cos(2t)*sin(6t)
x=3sin(3t) y=3tan(t)
x=cos5t*tan(t) y=cos(2t)*tan(t)
x=sin(3t)*cos(t) y=tan(t)
x=3cos(3t) y=2sin(6t)
x=sin(t)*tan(t) y=tan(t)*cos(t)
x=8cos(t) y=5sin(t)cos(t)
0<=t<=2pi
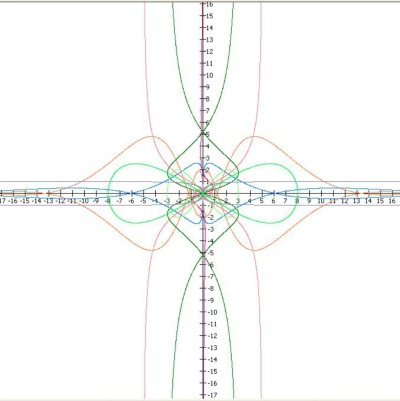
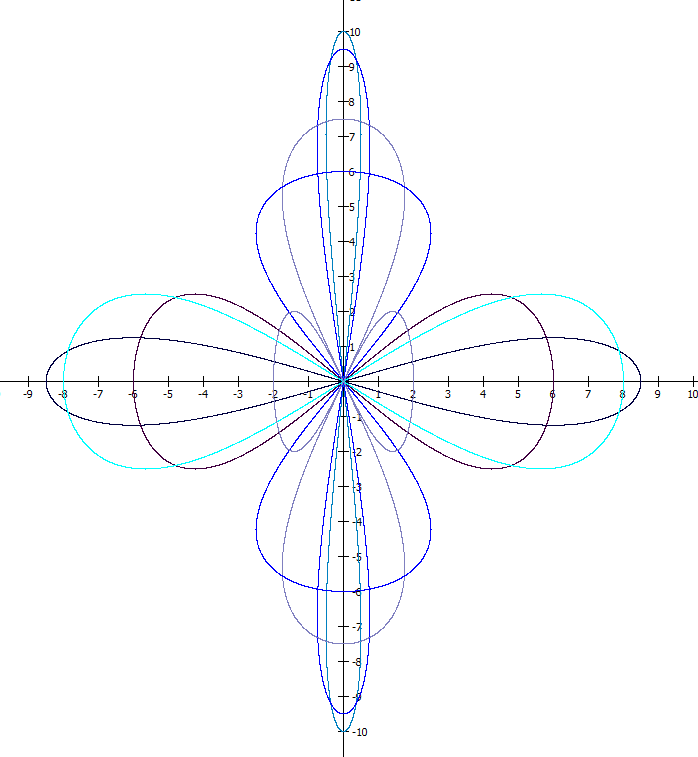

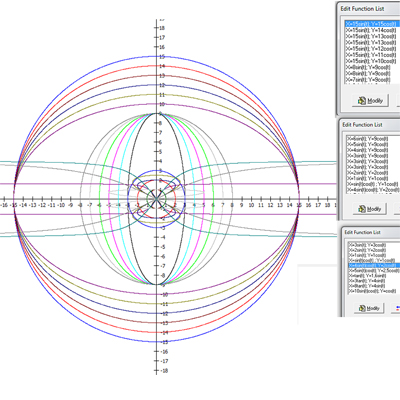
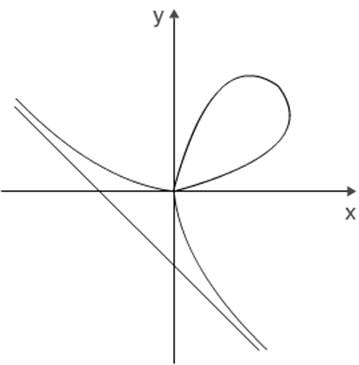
Odgovor: Zadatak 01 - Krive u ravni
x=1tcos(2t)*sin(t)*1sin(2t); y=1tsin(2t)*cos(t)*1cos(2t); 0<=T<=2pi
x=1.2tcos(2t)*sin(t)*1.2sin(2t); y=1.2tsin(2t)*cos(t)*1.2cos(2t); 0<=T<=2pi
x=1.4tcos(2t)*sin(t)*1.4sin(2t); y=1.4tsin(2t)*cos(t)*1.4cos(2t); 0<=T<=2pi
x=1.6tcos(2t)*sin(t)*1.6sin(2t); y=1.6tsin(2t)*cos(t)*1.6cos(2t); 0<=T<=2pi
x=1.9tcos(2t)*sin(t)*1.9sin(2t); y=1.9tsin(2t)*cos(t)*1.9cos(2t); 0<=T<=2pi
x=1.3tcos(2t)*sin(t)*1.3sin(2t); y=1.3tsin(2t)*cos(t)*1.3cos(2t); 0<=T<=2pi
x=1.5tcos(2t)*sin(t)*1.5sin(2t); y=1.5tsin(2t)*cos(t)*1.5cos(2t); 0<=T<=2pi
x=2tcos(2t)*sin(t)*2sin(2t); y=2tsin(2t)*cos(t)*2cos(2t); 0<=T<=2pi
x=2.1tcos(2t)*sin(t)*2.1sin(2t); y=2.1tsin(2t)*cos(t)*2.1cos(2t); 0<=T<=2pi
x=2.2tcos(2t)*sin(t)*2.2sin(2t); y=2.2tsin(2t)*cos(t)*2.2cos(2t); 0<=T<=2pi
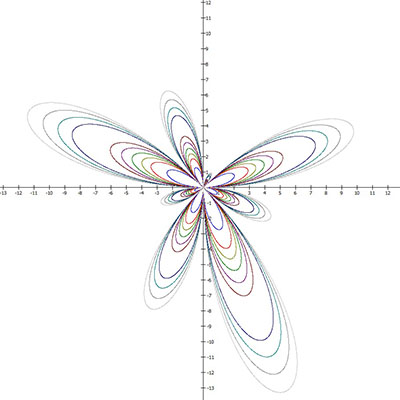
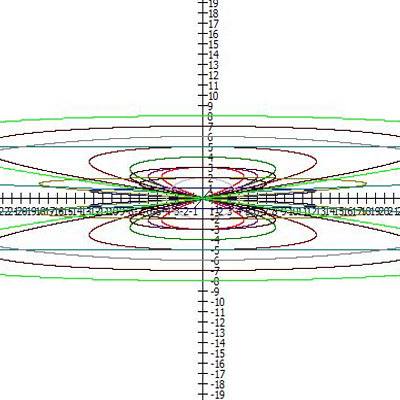
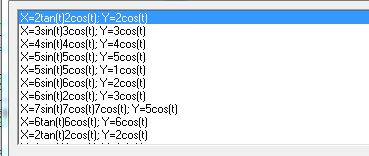
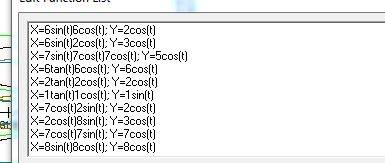
Odgovor: Zadatak 01 - Krive u ravni
x=3cos(2t)*sin(t)*1sin(2t); y=3sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=4cos(2t)*sin(t)*1sin(2t); y=4sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=5cos(2t)*sin(t)*1sin(2t); y=5sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=6cos(2t)*sin(t)*1sin(2t); y=6sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=7cos(2t)*sin(t)*1sin(2t); y=7sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=8cos(2t)*sin(t)*1sin(2t); y=8sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=9cos(2t)*sin(t)*1sin(2t); y=9sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=10cos(2t)*sin(t)*1sin(2t); y=10sin(2t)*cos(t)*1cos(2t); 0<=t<=2pi;
x=sin(2t); y=cos(2t); 0<=t<=2pi;
x=2sin(2t); y=cos(2t); 0<=t<=2pi;
x=3sin(2t); y=cos(2t); 0<=t<=2pi;
x=4sin(2t); y=cos(2t); 0<=t<=2pi;
x=5sin(2t); y=cos(2t); 0<=t<=2pi;
x=6sin(2t); y=cos(2t); 0<=t<=2pi;
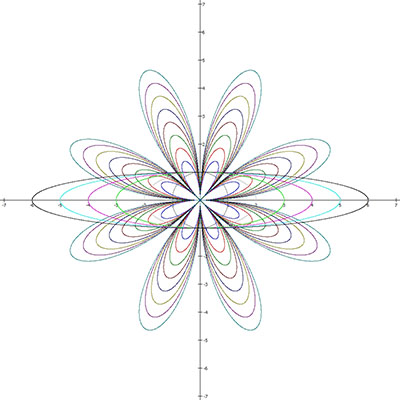
Odgovor: Zadatak 01 - Krive u ravni
X=4*sin(t)*cos(t)
Y=(1/2)*tan(t)
X=3.5*sin(t)*cos(t)
Y=(1/2)*tan(t)
X=3*sin(t)*cos(t)
Y=1/2*tan(t)
X=2.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=2*sin(t)*cos(t)
Y=1/2*tan(t)
X=1.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=sin(t)*cos(t)
Y=1/2*tan(t)
X=0.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=-0.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=-sin(t)*cos(t)
Y=1/2*tan(t)
X=-1.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=-2*sin(t)*cos(t)
Y=1/2*tan(t)
X=-2.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=-3*sin(t)*cos(t)
Y=1/2*tan(t)
X=-3.5*sin(t)*cos(t)
Y=1/2*tan(t)
X=-4*sin(t)*cos(t)
Y=1/2*tan(t)
X=2*sin(t)*3*cos(t)
Y=4*cos(t)
X=2.5*sin(t)*3*cos(t)
Y=3.75*cos(t)
X=3*sin(t)*3*cos(t)
Y=3.5*cos(t)
X=3.5*sin(t)*3*cos(t)
Y=3.25*cos(t)
X=4*sin(t)*3*cos(t)
Y=3*cos(t)
X=4.5*sin(t)*3*cos(t)
Y=2.75*cos(t)
X=5*sin(t)*3*cos(t)
Y=2.5*cos(t)
X=5.5*sin(t)*3*cos(t)
Y=2.25*cos(t)
X=6*sin(t)*3*cos(t)
Y=2*cos(t)
parametar 0 < t < 2pi
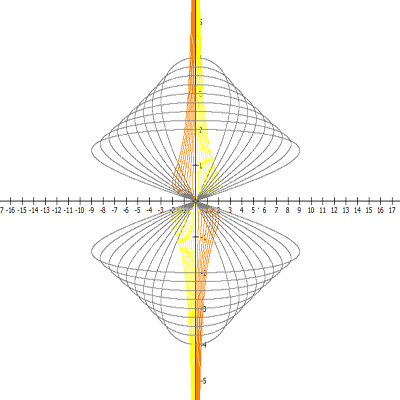
Одговор: Zadatak 01 - Krive u ravni
x=-20cos(t)sin(t) y=2cos(t) x=-18cos(t)sin(t) y=2cos(t) x=-16cos(t)sin(t) y=-10cos(t) x=-14sin(t)cos(t) y=-10cos(t) x=-12cos(t)sin(t) y=-2cos(t) x=30cos(t)sin(t) y=-8cos(t)sin(t) x=-10cos(t)sin(t) y=4sin(t) x=-8cos(t)sin(t) y=2sin(t) x=-2cos(t)sin(t) y=0.5cos(t) x=cos(t)sin(t) y=6cos(t)sin(t) x=0.5cos(t)sin(t) y=3cos(t) x=1.25cos(t)sin(t) y=3.25cos(t) x=1.5cos(t)sin(t) y=3.5cos(t) x=1.75cos(t)sin(t) y=3.75cos(t) x=2cos(t)sin(t) y=4cos(t) x=2.25cos(t)sin(t) y=4.25cos(t) x=2.5cos(t)sin(t) y=4.5cos(t) x=2.75cos(t)sin(t) y=4.75cos(t) x=3cos(t)sin(t) y=5cos(t) x=3.25cos(t)sin(t) y=5.25cos(t) x=3.5cos(t)sin(t) y=5.5cos(t) x=3.75cos(t)sin(t) y=5.75cos(t) x=6cos(t)sin(t) y=6cos(t) x=7cos(t)sin(t) y=22cos(t) x=8cos(t)sin(t) y=11cos(t)
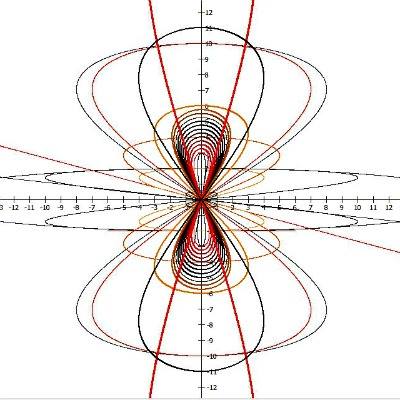
Odgovor: Zadatak 01 - Krive u ravni
1.
x=3sec(2t)*cos(t)
y=a*cos(2t)*cos(t)
a=(2,3,4,5,6,7,8,9,10,11,12)
2.
x=a*sin(2t)
y=a*sin(3t)
a=(5,5.5,6,6.5,7)
3.
1) x=-a*cosh(1-cos(t))
y=sinh(t)
2) x=a*cosh(1-cos(t))
y=-sinh(t)
a=(0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1)
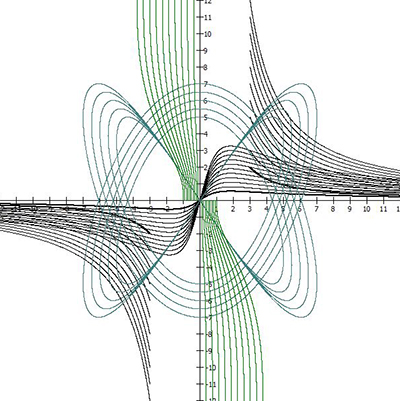
Odgovor: Zadatak 01 - Krive u ravni
x=3cos(t)*cos(4t)*sin(2t), y=x=2tan(t)*3sin(t), 0<=t<=2pi
x=4cos(t)*cos(4t)*sin(2t), y=x=3tan(t)*3sin(t), 0<=t<=2pi
x=5cos(t)*cos(4t)*sin(2t), y=4tan(t)*3sin(t), 0<=t<=2pi
x=4cos(t)*cos(5t)*sin(3t), y=3tan(t)*4sin(t)*sin(t), 0<=t<=2pi
x=6cos(t)*cos(5t)*sin(3t), y=5tan(t)*4sin(t)*sin(t), 0<=t<=2pi
x=8cos(t)*cos(5t)*sin(3t), y=7tan(t)*4sin(t)*sin(t), 0<=t<=2pi
x=5cos(t)*8sin(t), y=5cos(2t)*tan(t), 0<=t<=2pi
x=4cos(t)*8sin(t), y=4cos(2t)*tan(t), 0<=t<=2pi
x=3cos(t)*8sin(t,) y=3cos(2t)*tan(t), 0<=t<=2pi
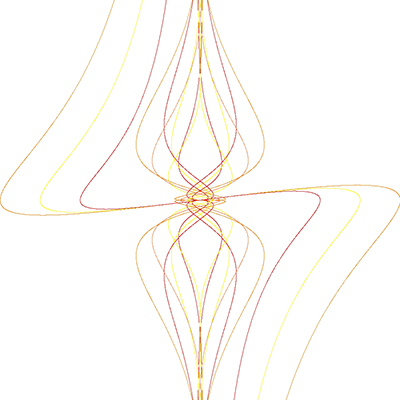
Odgovor: Zadatak 01 - Krive u ravni
X=1.5sin(t)1.5cos(t) Y=2cos(t)2tan(t)
X=2cos(t)2tan(t) Y=1.5sin(t)1.5cos(t)
X=2sin(t)2cos(t) Y=2.1cos(t)2.1tan(t)
X=2.1cos(t)2.1tan(t) Y=2sin(t)2cos(t)
X=2.4sin(t)2.4cos(t) Y=2.3cos(t)2.3tan(t)
X=2.3cos(t)2.3tan(t) Y=2.3sin(t)2.3cos(t)
X=2.55sin(t)2.55cos(t) Y=2.5cos(t)2.5tan(t)
X=6cos(t) Y=3tan(t)
X=7cos(t) Y=4tan(t)
X=8cos(t) Y=5tan(t)
X=9cos(t) Y=6tan(t)
X=10cos(t) Y=6tan(t)
X=4tan(t) Y=7cos(t)
X=5tan(t) Y=8cos(t)
X=6tan(t) Y=9cos(t)
X=7tan(t) Y=10cos(t)
X=8tan(t) Y=11cos(t)
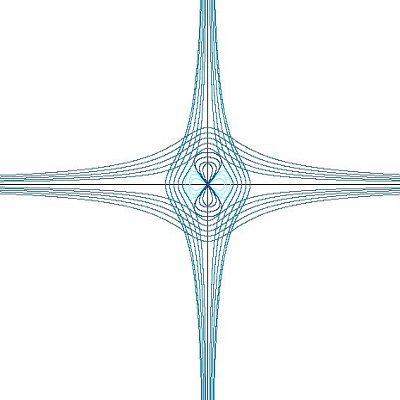
Odgovor: Zadatak 01 - Krive u ravni
x=2cos(T) y=3sin(2T)
x=3sin(2T) y=2cos(3T)
x=6sin(4T) y=2cos(T)
x=4sin(T) y=1sin(3T)
x=8cos(4T) y=3cos(2T)
x=3cos(T) y=4sin(2T)
x=4cos(T) y=5sin(2T)
x=5cos(T) y=6sin(2T)
T<=2pi
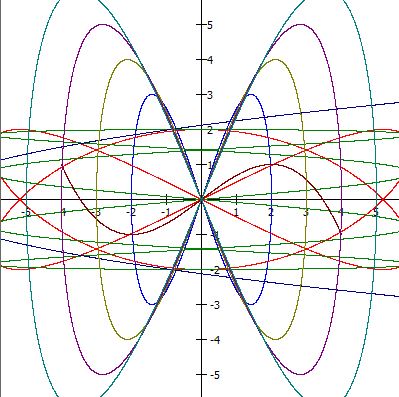
Odgovor: Zadatak 01 - Krive u ravni
x=sec(t)^5;Y=sec(t)^3*sin(t)
x=sec(t)^5;Y=sec(t)^3*sin(2t)
x=sec(t)^5;Y=sec(t)^3*sin(3t)
x=sin3(3t)*cos(t)=Y=sec(t)
x=3*sin(2t)*cos(3t);Y=tan(3t)
x=3*sin(4t)*cos(5t);Y=tan(5t)
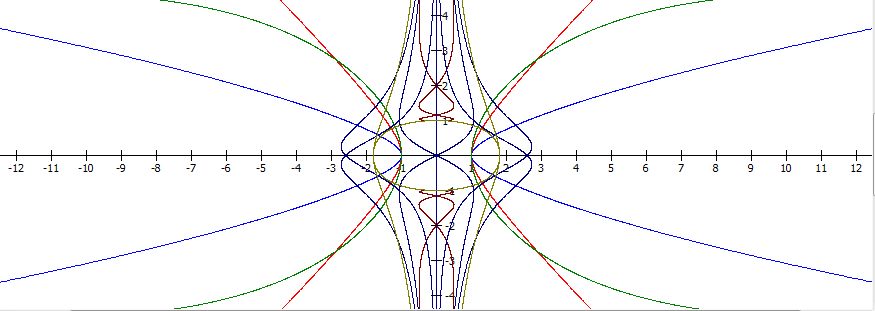
Odgovor: Zadatak 01 - Krive u ravni
x=4cos(t) y=5tan(t)
x=6cos(2t) y=2tan(t)
x=5cos(t) y=2tan(t)
x=2cos(t) y=9tan(t)
x=4sin(t)*cos(2t)*tan(2t) y=6sin(t)*cos(9t)
x=8sin(t)*cos(7t)*tan(6t) y=2sin(t)*cos(5t)
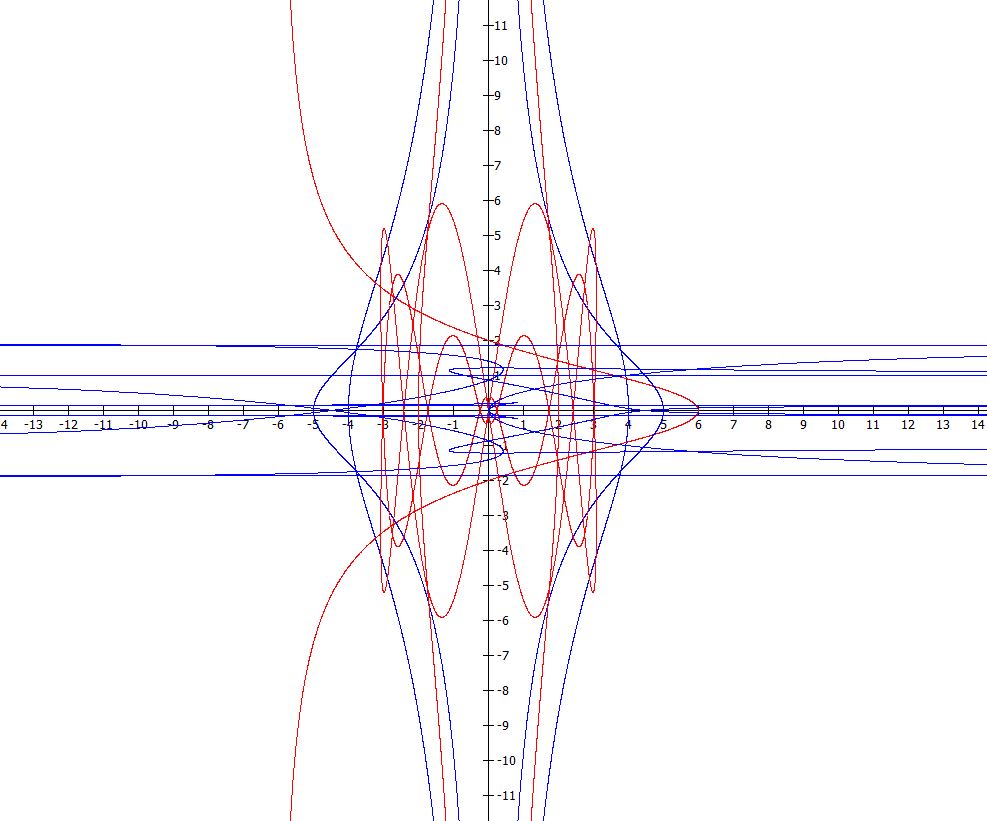
Odgovor: Zadatak 01 - Krive u ravni
x=sin(2t)*6cos(t) y=tan(t)
x=2sin(2t)*6cos(t) y=tan(t)
x=3sin(2t)*5cos(t) y=tan(t)
x=4sin(2t)*4cos(t) y=tan(t)
x=5sin(2t)*3cos(t) y=tan(t)
x=6sin(2t)*2cos(t) y=tan(t)
x=7sin(2t)*cos(t) y=tan(t)
x=8sin(2t)*cos(t) y=tan(t)
x=9sin(2t)*cos(t) y=tan(t)
x=10sin(2t)*cos(t) y=tan(t)
x=11sin(2t)*cos(t) y=tan(t)
x=12sin(2t)*cos(t) y=tan(t)
x=13sin(2t)*cos(t) y=tan(t)
x=14sin(2t)*cos(t) y=tan(t)
x=3tan(t) y=sin(2t)*cos(t)
x=4tan(t) y=sin(2t)*cos(t)
x=5tan(t) y=sin(2t)*cos(t)
x=6tan(t) y=sin(2t)*cos(t)
x=7tan(t) y=sin(2t)*cos(t)
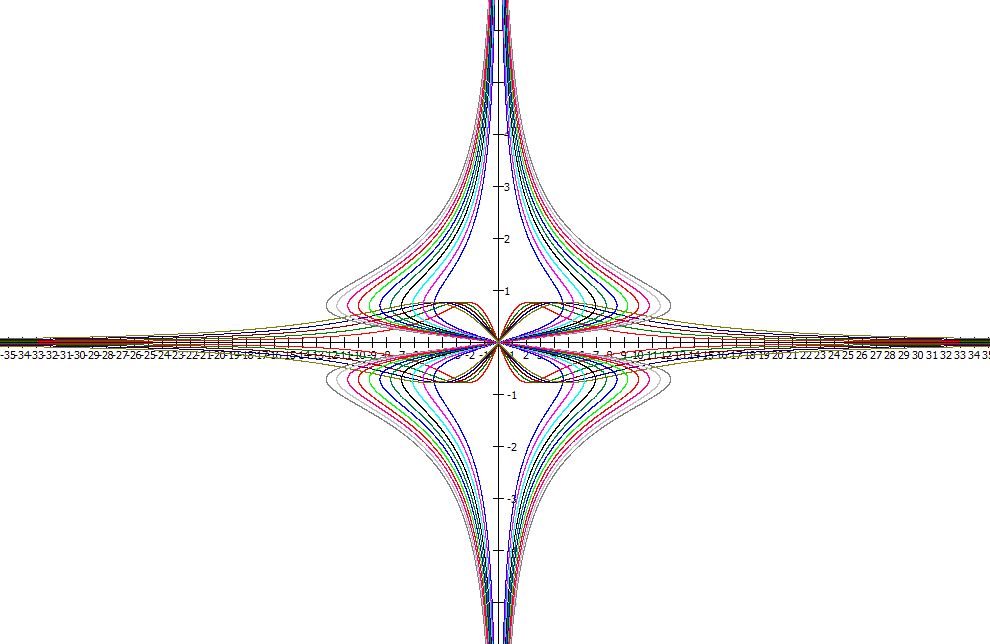
Odgovor: Zadatak 01 - Krive u ravni
x=sin(t)*cos(2t) y=tan(t) x=tan(t) y=sin(t)*cos(2t) x=tan(2t) y=sin(t)*cos(6t) x=sin(t)*cos(4t) y=tan(t) x=sin(t)*cos(2t)^3 y=tan(t)
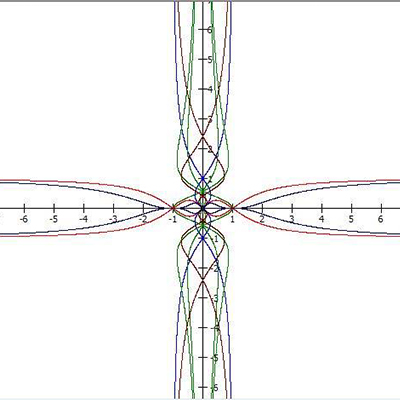
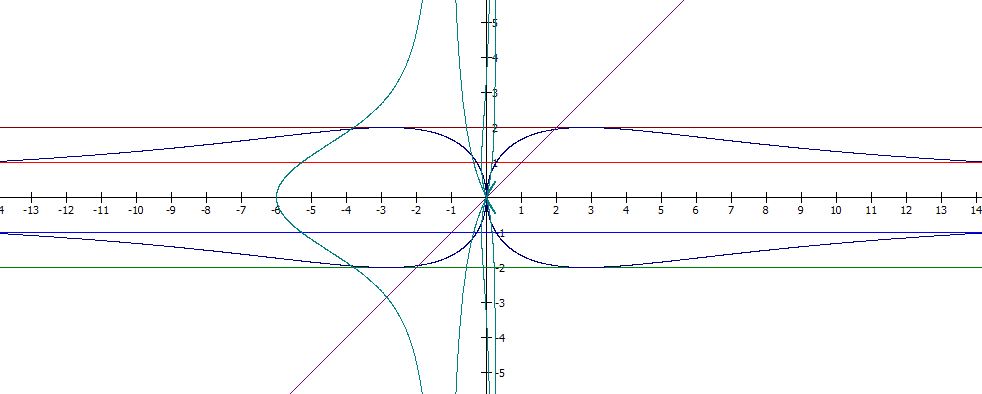
Odgovor: Zadatak 01 - Krive u ravni
x=-sinh(t) y=cosh(t)
x=cosh(t) y=sin(t)
x=sinh(t) y=cosh(t)
x=-cos(t) y=sin(t)
x=-sinh(t)+1 y=cosh(t)+1
x=cosh(t)+1 y=sin(t)+1
x=sinh(t)+1 y=cosh(t)+1
x=-cos(t)+1 y=sin(t)+1
x=-sinh(t)+2 y=cosh(t)+2
x=cosh(t)+2 y=sin(t)+2
x=sinh(t)+2 y=cosh(t)+2
x=-cos(t)+2 y=sin(t)+2
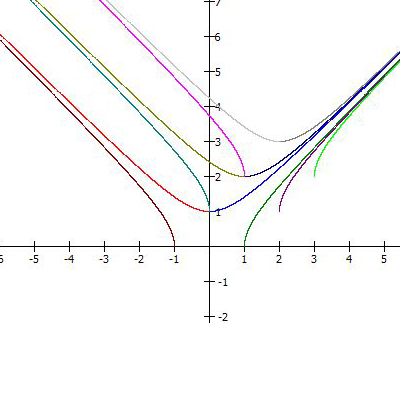
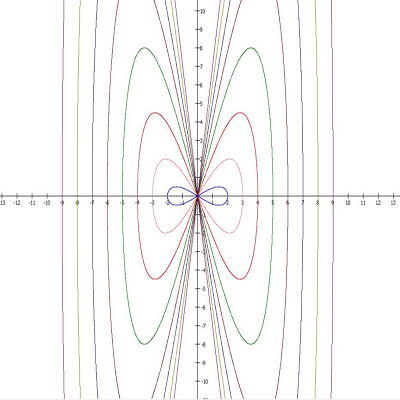
Odgovor: Zadatak 01 - Krive u ravni
x=2tan(t)*3sin(t); y=4cos(t)*cos(5t)*sin(3t); 0<=T<=2p
x=4tan(t)*4sin(t)*sin(t); y=7cos(t)*cos(8t)*sin(6t);0<=T<=2p
x=10cos(t)*2sin(t); y=7cos(t)*cos(8t)*sin(6t)';0<=T<=2p
x=2tan(t)*3sin(t); y=7cos(t)*cos(8t)*sin(6t);0<=T<=2p
x=10cos(t)*2sin(t); y=10sin(2t)*cos(t);0<=T<=2p
x=5tan(t)*6sin(t); y=6cos(t)*cos(7t)*sin(5t);0<=T<=2p
x=sin(t)*cos(4t); y= tan(t);0<=T<=2p
x=sin(t)*cos(6t); y=tan(t);0<=T<=2p
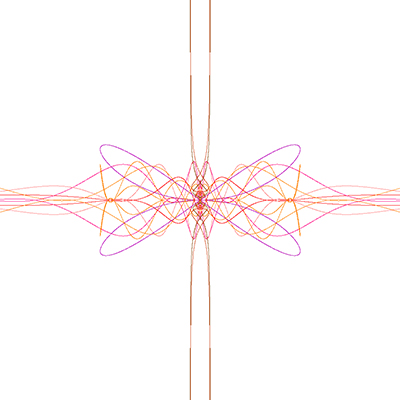
Odgovor: Zadatak 01 - Krive u ravni
x=8cos(3t)*tan(t); y=8cos(t)*cos(2t)
x=10cos(3t)*tan(t); y=10cos(t)*cos(2t)
x=6cos(3t)*tan(t); y=6cos(t)*cos(2t)
x=12cos(3t)*tan(t); y=12cos(t)*cos(2t)
x=14cos(3t)*tan(t); y=14cos(t)*cos(2t)
x=18cos(3t)*tan(t); y=18cos(t)*cos(2t)
x=6cos(3t)*tan(t); y=6cos(t)*cos(2t)
x=10cos(3t)*tan(t); y=10cos(t)*cos(2t)
x=12cos(3t)*tan(t); y=12cos(t)*cos(2t)
x=14cos(3t)*tan(t); y=14cos(t)*cos(2t)
x=4cos(3t)*tan(t); y=4cos(t)*cos(2t)
x=20cos(3t)*tan(t); y=20cos(t)*cos(2t)
x=18cos(3t)*tan(t); y=18cos(t)*cos(2t)
x=10cos(3t)*tan(t); y=10cos(t)*cos(2t)
x=8cos(3t)*tan(t); y=8cos(t)*cos(2t)
0<=T<=2pi
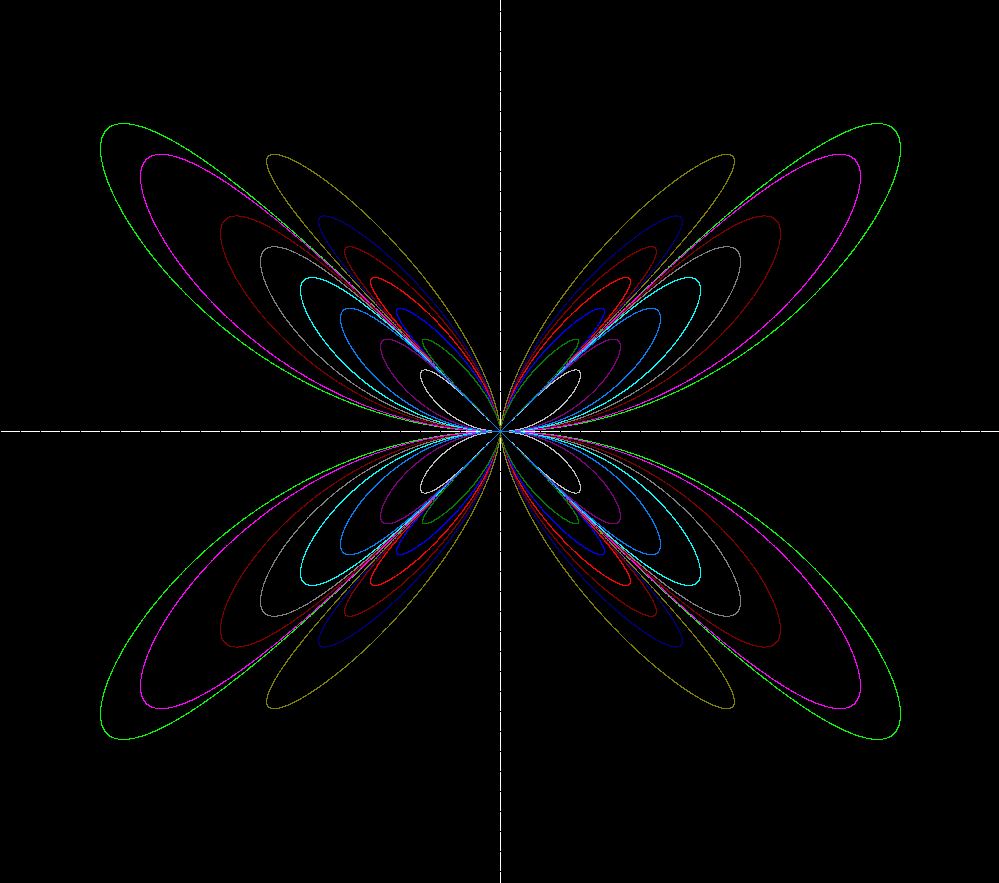
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)*2tan(t) y=cos(t)*4sin(t)
x=2sin(t)*2tan(t) y=cos(t)*6sin(t)
x=2sin(t)*2tan(t) y=cos(t)*8sin(t)
x=2sin(t)*2tan(t) y=cos(t)*8,5sin(t)
x=2sin(t)*2tan(t) y=cos(t)*9sin(t)
x=2sin(t)*2tan(t) y=cos(t)*9,5sin(t)
x=2sin(t)*2tan(t) y=cos(t)*10sin(t)
x=cos(t)*2sin(t) y=3,5cos(t)*tan(t)
x=cos(t)*2sin(t) y=4cos(t)*tan(t)
x=1,5cos(t)*2sin(t) y=4,5cos(t)*tan(t)
x=2cos(t)*2sin(t) y=5cos(t)*tan(t)
x=2,5cos(t)*2sin(t) y=5,5cos(t)*tan(t)
x=3cos(t)*2sin(t) y=6cos(t)*tan(t)
x=3cos(t)*2sin(t) y=6,5cos(t)*tan(t)
x=3cos(t)*2sin(t) y=7cos(t)*tan(t)
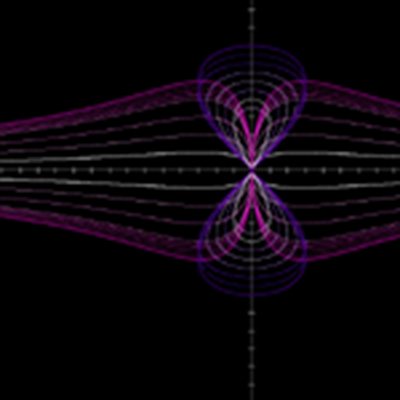
Odgovor: Zadatak 01 - Krive u ravni
X=sin(5t)*cos(3t) Y=tan(t)
X=2sin(5t)*cos(3t) Y=tan(t)
X=3sin(5t)*cos(3t) Y=tan(t)
X=4sin(5t)*cos(3t) Y=tan(t)
X=5sin(5t)*cos(3t) Y=tan(t)
X=6sin(5t)*cos(3t) Y=tan(t)
X=7sin(5t)*cos(3t) Y=tan(t)
X=8sin(5t)*cos(3t) Y=tan(t)
X=9sin(5t)*cos(3t) Y=tan(t)
X=10sin(5t)*cos(3t) Y=tan(t)
X=11sin(5t)*cos(3t) Y=tan(t)
0 <= T <= 2pi
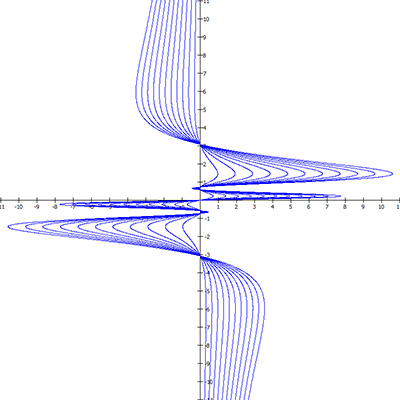
Odgovor: Zadatak 01 - Krive u ravni
X=cos(t)*sin(t); Y=8cos(t)*tan(t) X=2cos(t)*sin(t); Y=8cos(t)*tan(t) X=4cos(t)*sin(t); Y=8cos(t)*tan(t) X=8cos(t)*sin(t); Y=8cos(t)*tan(t) X=16cos(t)*sin(t); Y=8cos(t)*tan(t) X=32cos(t)*sin(t); Y=8cos(t)*tan(t) X=cos(t)*sin(t); Y=6cos(t)*tan(t) X=2cos(t)*sin(t); Y=6cos(t)*tan(t) X=4cos(t)*sin(t); Y=6cos(t)*tan(t) X=8cos(t)*sin(t); Y=6cos(t)*tan(t) X=16cos(t)*sin(t); Y=6cos(t)*tan(t) X=cos(t)*sin(t); Y=4cos(t)*tan(t) X=2cos(t)*sin(t); Y=4cos(t)*tan(t) X=4cos(t)*sin(t); Y=4cos(t)*tan(t) X=8cos(t)*sin(t); Y=4cos(t)*tan(t)
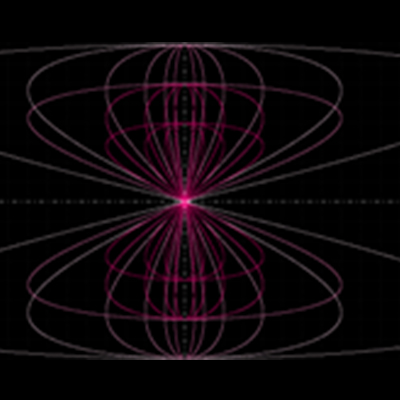
Odgovor: Zadatak 01 - Krive u ravni
x=3cos(t)*4sin(t); y=2tan(t)
x=3cos(t)*4sin(t); y=3tan(t)
x=3cos(t)*4sin(t); y=4tan(t)
x=3cos(t)*4sin(t); y=5tan(t)
x=3cos(t)*4sin(t); y=6tan(t)
x=3cos(t)*4sin(t); y=7tan(t)
x=3cos(t)*4sin(t); y=-7tan(t)
x=3cos(t)*4sin(t); y=-6tan(t)
x=3cos(t)*4sin(t); y=-5tan(t)
x=3cos(t)*4sin(t); y=-4tan(t)
x=3cos(t)*4sin(t); y=-3tan(t)
x=3cos(t)*4sin(t); y=-2tan(t)
granice parametra za sve f/je 0<= t <= 2pi
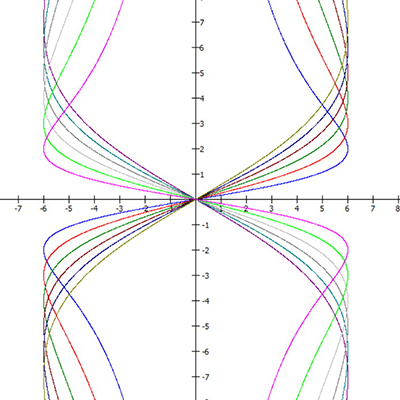
Odgovor: Zadatak 01 - Krive u ravni
x=sin(t)*cos(t); y=tan(t)*sin(t)-cos(t)
x=sin(t)*cos(t); y=1/2tan(t)*1/2sin(t)-1/2cos(t)
x=sin(t)*cos(t); y=2tan(t)*2sin(t)-2cos(t)
x=5/10sin(t)*5/10cos(t); y=tan(t)*sin(t)-cos(t)
x=5/10sin(t)*5/10cos(t); y=5/10tan(t)*5/10sin(t)-5/10cos(t)
x=15/10sin(t)*15/10cos(t); y=tan(t)*sin(t)-cos(t)
x=2sin(t)*2cos(t); y=tan(t)*sin(t)-cos(t)
x=5/4sin(t)*5/4cos(t); y=tan(t)*sin(t)-cos(t)
x=5/10sin(t)*5/10cos(t); y=15/10tan(t)*15/10sin(t)-15/10cos(t)
x= 17/10sin(t)*17/10cos(t; y=tan(t)*sin(t)-cos(t)
x=19/10sin(t)*19/10cos(t); y=tan(t)*sin(t)-cos(t)
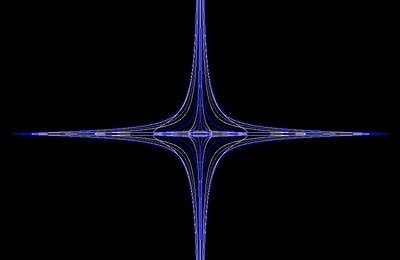
Odgovor: Zadatak 01 - Krive u ravni
x=4sin(t)cos(t) y=3sec(t)
x=5sin(t)cos(t) y=4sec(t)
x=sin(t) y=2sec(t)
x=5cos(t) y=3tan(t)
x=6cos(t) y=2tan(t)
x=7cos(t) y=tan(t)
x=5sec(t) y=tan(2t)
x=6sec(t) y=tan(t)
x=7sec(t) y=tan(t)
x=8sec(t) y=tan(t)
x=9sec(t) y=tan(t)
Odgovor: Zadatak 01 - Krive u ravni
x=1cos(t)*2sin(t);y=2cos(t)*2tan(t)
x=3cos(t)*2sin(t);y=4cos(t)*tan(t)
x=5cos(t)*2sin(t);y=5cos(t)*tan(t)
x=6cos(t)*3sin(t);y=6cos(t)*tan(t)
x=9cos(t)*3sin(t);y=9cos(t)*tan(t)
x=3cos(t)*2sin(t);y=3cos(t)*2tan(t)
x=4cos(t)*2sin(t);y=4cos(t)*2tan(t)
x=6cos(t)*3sin(t);y=6cos(t)*1tan(t)
x=5cos(t)*2sin(t);y=7cos(t)*tan(t)
x=1cos(t)*sin(t);y=4cos(t)*tan(t)
x=7cos(t)*3sin(t);y=7cos(t)*1tan(t)
x=8cos(t)*sin(t);y=4cos(t)*tan(t)
x=16cos(t)*sin(t);y=6cos(t)*tan(t)
x=32cos(t)*sin(t);y=8cos(t)*tan(t)
x=2cos(t)*sin(t);y=8cos(t)*tan(t)
x=8cos(t)*sin(t);y=4cos(t)*tan(t)
x=cos(t)*sin(t);y=8cos(t)*tan(t)
x=2cos(t)*sin(t);y=4cos(t)*tan(t)
x=4cos(t)*sin(t);y=4cos(t)*tan(t)
x=cos(t)*sin(t);y=8cos(t)*tan(t)
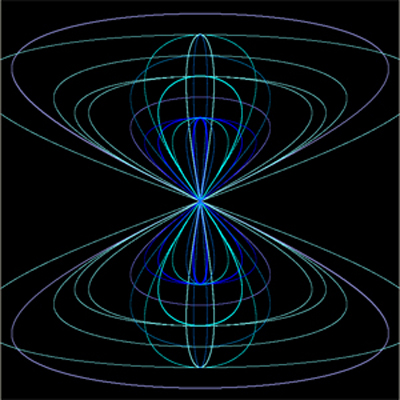
Odgovor: Zadatak 01 - Krive u ravni
x=1cos(t)*2sin(t);y=2cos(t)*2tan(t)
x=3cos(t)*2sin(t);y=4cos(t)*tan(t)
x=5cos(t)*2sin(t);y=5cos(t)*tan(t)
x=6cos(t)*3sin(t);y=6cos(t)*tan(t)
x=9cos(t)*3sin(t);y=9cos(t)*tan(t)
x=3cos(t)*2sin(t);y=3cos(t)*2tan(t)
x=4cos(t)*2sin(t);y=4cos(t)*2tan(t)
x=6cos(t)*3sin(t);y=6cos(t)*1tan(t)
x=5cos(t)*2sin(t);y=7cos(t)*tan(t)
x=1cos(t)*sin(t);y=4cos(t)*tan(t)
x=7cos(t)*3sin(t);y=7cos(t)*1tan(t)
x=8cos(t)*sin(t);y=4cos(t)*tan(t)
x=16cos(t)*sin(t);y=6cos(t)*tan(t)
x=32cos(t)*sin(t);y=8cos(t)*tan(t)
x=2cos(t)*sin(t);y=8cos(t)*tan(t)
x=8cos(t)*sin(t);y=4cos(t)*tan(t)
x=cos(t)*sin(t);y=8cos(t)*tan(t)
x=2cos(t)*sin(t);y=4cos(t)*tan(t)
x=4cos(t)*sin(t);y=4cos(t)*tan(t)
x=cos(t)*sin(t);y=8cos(t)*tan(t)
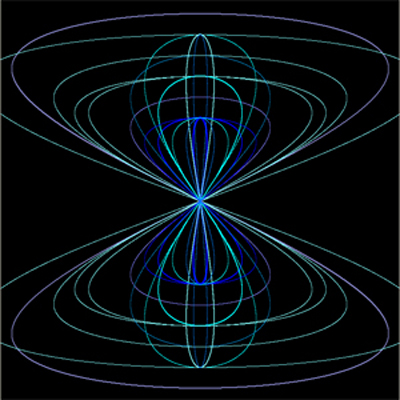
Odgovor: Zadatak 01 - Krive u ravni
X=a*sin(b*T)
Y=a*cos(c*T)
0<T<2pi
a=2, b=2, c=3
a=3, b=4, c=5
a=4, b=6, c=7
a=5, b=8, c=9
a=6, b=10, c=11
a=7, b=12, c=13
a=8, b=14, c=15
a=9, b=16, c=17
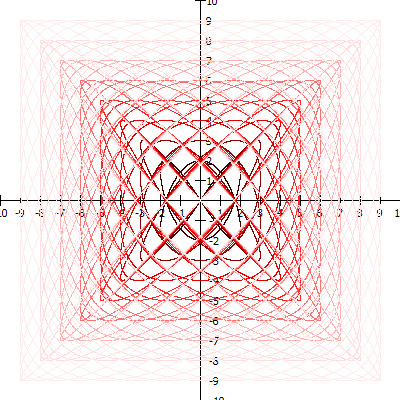
Odgovor: Zadatak 01 - Krive u ravni
x=1.5sin(t)cos(t) y=8.5cos(t)
x=2sin(t)cos(t) y=8cos(t)
x=2cos(3t)*tan(t); y=2cos(t)*cos(2t)
x=8sin(t)*cot(t); y=1/2tan(t)
x=8sin(t)*cot(t); y=tan(t)
x=8sin(t)*cot(t); y=tan(t)
x=8sin(t)*cot(t); y=3/2tan(t)
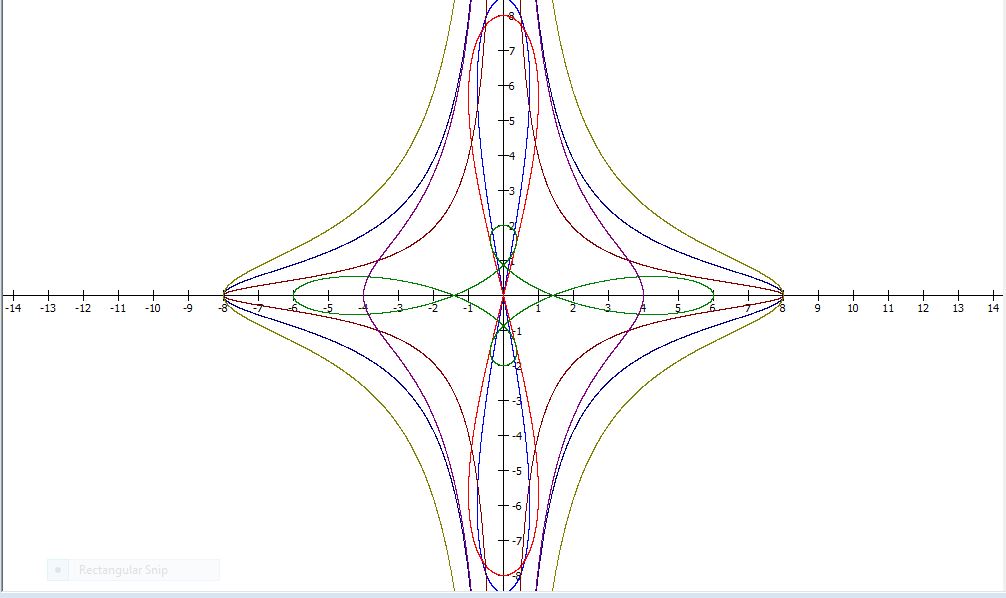
Odgovor: Zadatak 01 - Krive u ravni
x=4tan(t)*4sin (t) y=4cos(t)*4sin (t)
x=0.3sin(t)*0.3cos(t) y=0.3cos(t)*0.3tan(t)
x=4.5sin(t)*4.5cos(t) y=4.5cos(t)*4.5tan(t)
x=2cos(3t)*tan(t) y=2cos(t)*cos(2t)
x=1.5tan(t)*1.5sin(t) y=1.5cos(t)*1.5sin(t)
x=2.5tan(t)*2.5sin(t) y=2.5cos(t)*2.5sin(t)
0<=T<= 2pi
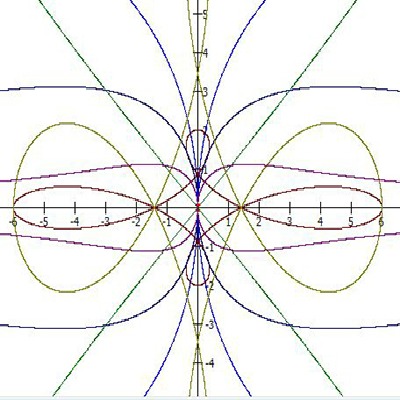
Odgovor: Zadatak 01 - Krive u ravni
x=tsin(t)cos(t) ; y=9cos(t)
x=1sin(t)cos(t) ; y=8cos(t)
x=2sin(t)cos(t) ; y=7cos(t)
x=3sin(t)cos(t) ; y=6cos(t)
x=4sin(t)cos(t) ; y=5cos(t)
x=5sin(t)cos(t) ; y=4cos(t)
x=6sin(t)cos(t) ; y=3cos(t)
x=7sin(t)cos(t) ; y=2cos(t)
x=8sin(t)cos(t) ; y=1cos(t)
x=9sin(t)cos(t) ; y=cos(t)
0<=T<=2pi
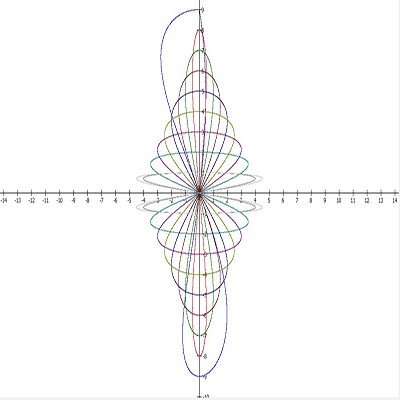
Odgovor: Zadatak 01 - Krive u ravni
X:tsin(t)cos(t) Y:9cos(t)
X: 5.5cos(t) Y:4.5sin(t)cos(t)
X:5cos(t) Y:5cos(t)
X:tan(t)*sin(t) Y:9cos(t)*sin(t)
X:tan(t)*sin(t) Y:6cos(t)*sin(t)
X: tan(t)*sin(t) Y:11cos(t)*sin(t)
X:3tan(2t)*sin(t) Y:3cos(t)*sin(2t)
Odgovor: Zadatak 01 - Krive u ravni
X=10tan(t), Y=1cos(t)10sin(t)
X=9tan(t), Y=2cos(t)9sin(t)
X=8tan(t), Y=3cos(t)8sin(t)
X=7tan(t), Y=4cos(t)7sin(t)
X=6tan(t), Y=5cos(t)6sin(t)
X=5tan(t), Y=6cos(t)5sin(t)
X=4tan(t), Y=7cos(t)4sin(t)
X=3tan(t), Y=8cos(t)3sin(t)
X=2tan(t), Y=9cos(t)2sin(t)
X=tan(t), Y=10cos(t)sin(t)
granica : 0<=t<=2pi
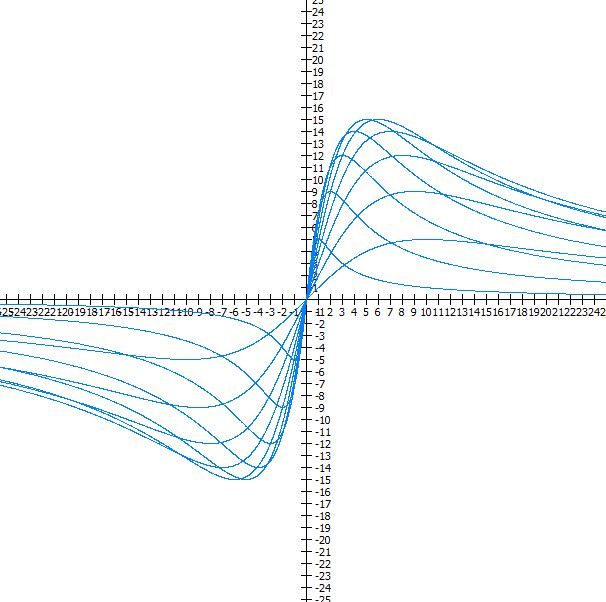
Odgovor: Zadatak 01 - Krive u ravni
X=tan(t) Y=sin(t)2cos(t)
X=tan(t) Y=sin(t)4cos(t)
X=tan(t) Y=sin(t)6cos(t)
X=tan(t) Y=sin(t)8cos(t)
X=sin(t)2cos(t) Y=tan(t)
X=sin(t)4cos(t) Y=tan(t)
X=sin(t)6cos(t) Y=tan(t)
X=sin(t)8cos(t) Y=tan(t)
0<=t<=2pi
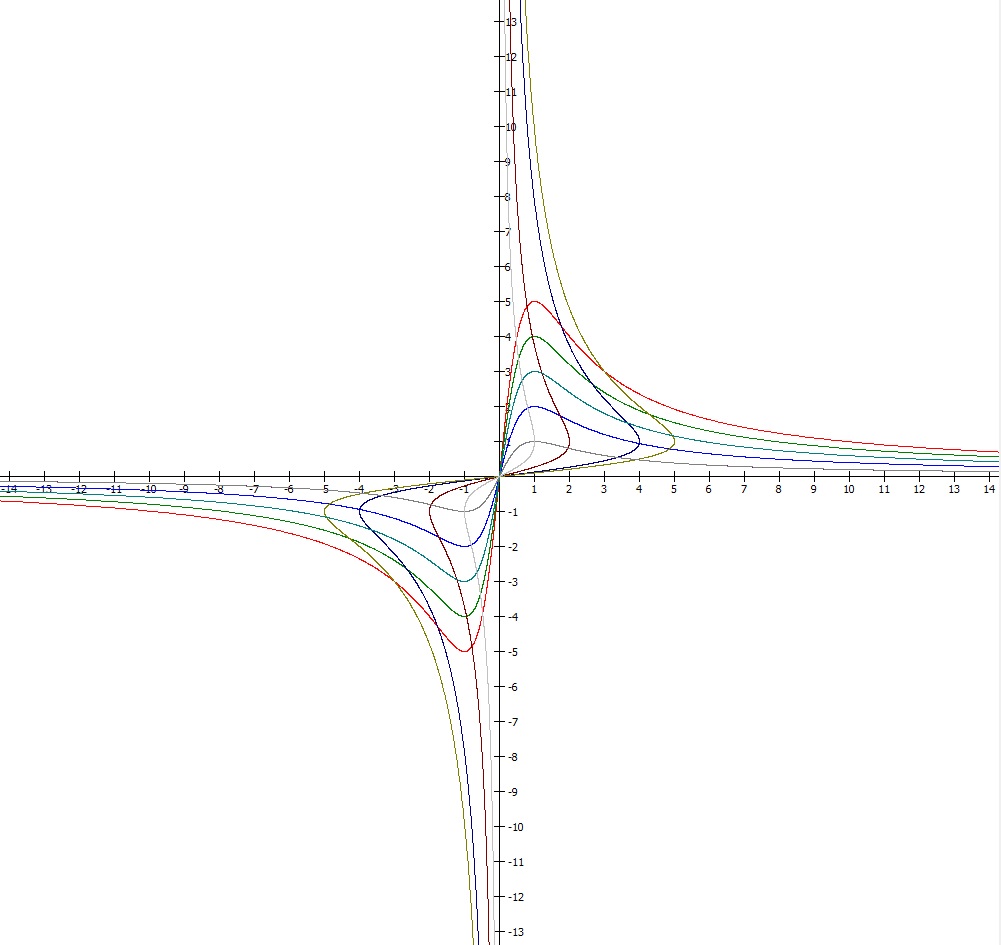
Odgovor: Zadatak 01 - Krive u ravni
x=10sin(2t)cos(2t) y=2cos(2t)
x=11sin(3t)cos(3t) y=3cos(3t)
x=9sin(12t)cos(12t) y=cos(12t)
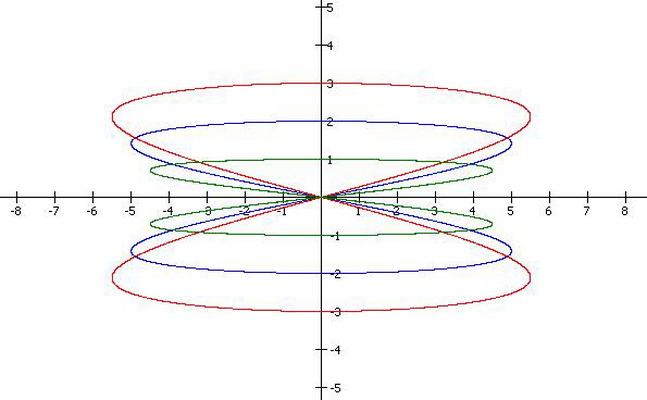
Odgovor: Zadatak 01 - Krive u ravni
x=sin(t)*cos(t); y=3cos(t);
x=2cos(t)*5cos(t)*4sin(t); y=tan(t);
x=cos(t)*5sin(t)*cos(t); y=tan(t);
x=6sin(t); y=4sin(2t)*1cos(4t)
x=6sin(2t)*cos(5t); y=3sin(t);
x=tan(t); y=sin(t),
x=tan(t); y=cos(t)

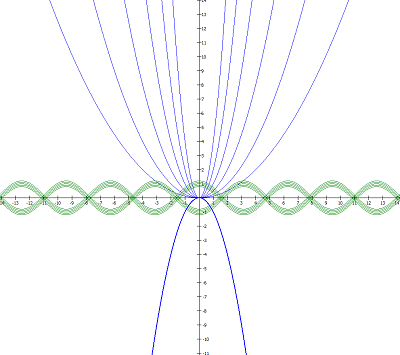

Odgovor: Zadatak 01 - Krive u ravni
- X= 1sin(t)4cos(t); Y=9cos(t)
- X= 1.5sin(t)4cos(t); Y=8.5cos(t)
- X= 2sin(t)4cos(t); Y=8cos(t)
- X= 2.5sin(t)4cos(t); Y=7.5cos(t)
- X= 3sin(t)4cos(t); Y=7cos(t)
- X= 3.5sin(t)4cos(t); Y=6.5cos(t)
- X= 4sin(t)4cos(t); Y=6cos(t)
- X= 4.5sin(t)4cos(t); Y=5.5cos(t)
- X= 5sin(t)4cos(t); Y=5cos(t)
- X= 5.5sin(t)4cos(t); Y=4.5cos(t)
- X= 6sin(t)4cos(t); Y=4cos(t)
- X= 7sin(t)4cos(t); Y=3cos(t)
- X= 8sin(t)4cos(t); Y=2cos(t)
- X=tan(t)*sin(t); Y= cos(t)*sin(t)
- X=tan(t)*sin(t); Y= 1.5cos(t)*sin(t)
- X=tan(t)*sin(t); Y= 2cos(t)*sin(t)
- X=tan(t)*sin(t); Y= 2.5cos(t)*sin(t)
- X=tan(t)*sin(t); Y= cos(t)*sin(t)
- X=-3.5*sin(t)*cos(t); Y= 1/2*tan(t)
- X=3.5*sin(t)*cos(t); Y= 1/2*tan(t)
- X=-2.5*sin(t)*cos(t); Y= 1/2*tan(t)
- X=-2.5*sin(t)*cos(t); Y= 1/2*tan(t)
0<=T<=2pi
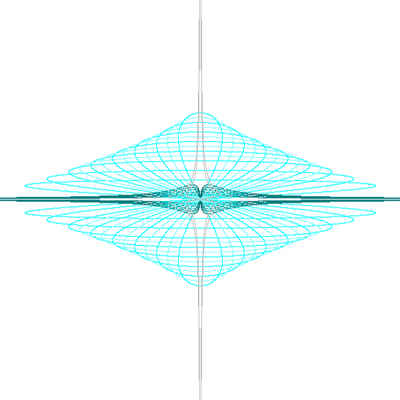
Re: Zadatak 01 - Krive u ravni
x=10tan(t) y=10sin(t)
x=9tan(t) y=9sin(t)
x=8tan(t) y=8sin(t)
x=7tan(t) y=7sin(t)
x=6tan(t) y=6sin(t)
x=5tan(t) y=5sin(t)
x=4tan(t) y=4sin(t)
x=3tan(t) y=3sin(t)
x=2tan(t) y=2sin(t)
x=1tan(t) y=1sin(t)
x=10cos(t) y=10tan(t)
x=9cos(t) y=9tan(t)
x=8cos(t) y=8tan(t)
x=7.2cos(t) y=7.2tan(t)
x=6.5cos(t) y=6.5tan(t)
x=5.9cos(t) y=5.9tan(t)
x=5.4cos(t) y=5.4tan(t)
x=5cos(t) y=5tan(t)
x=4.7cos(t) y=4.7tan(t)
x=4.6cos(t) y=4.6tan(t)
x=4.5cos(t) y=4.5tan(t)
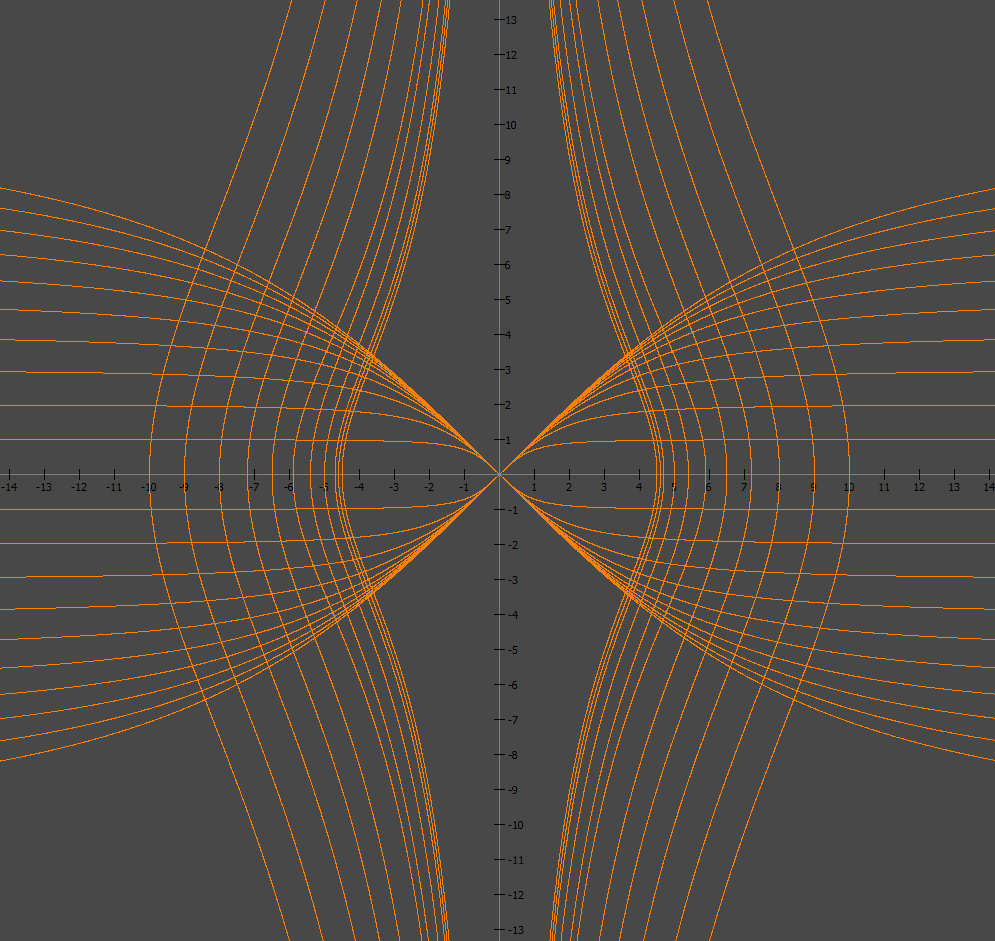
Odgovor: Zadatak 01 - Krive u ravni
Granica parametara: od -10 do 10
X= cos(t)*sin(t) ; Y= tan(t)*cos(t)
X= 2cos(t)*sin(t) ; Y= 2tan(t)*cos(t)
X= 3cos(t)*sin(t) ; Y= 3tan(t)*cos(t)
X= 4cos(t)*sin(t) ; Y= 4tan(t)*cos(t)
X= 5cos(t)*sin(t) ; Y= 5tan(t)*cos(t)
X= 6cos(t)*sin(t) ; Y= 6tan(t)*cos(t)
X= 7cos(t)*sin(t) ; Y= 7tan(t)*cos(t)
X= 10tan(t)*cos(t)^2 ; Y= 10cos(t)*sin(t)^2
X= 15tan(t)*cos(t)^2 ; Y= 15cos(t)*sin(t)^2
X= 20tan(t)*cos(t)^2 ; Y= 20cos(t)*sin(t)^2
X= 25tan(t)*cos(t)^2 ; Y= 25cos(t)*sin(t)^2
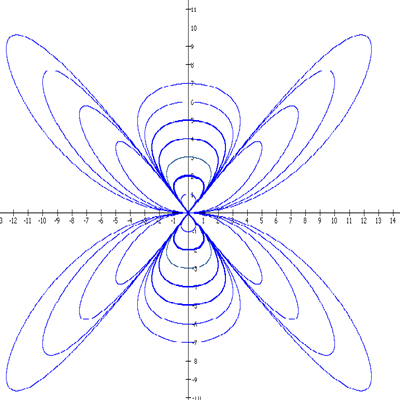
Odgovor: Zadatak 01 - Krive u ravni
0<T<10pi
x=4sin(2T) y=4sin(3T)
x=5sin(2T) y=3sin(3T)
x=6sin(2T) y=2sin(3T)
x=7sin(2T) y=sin(3T)
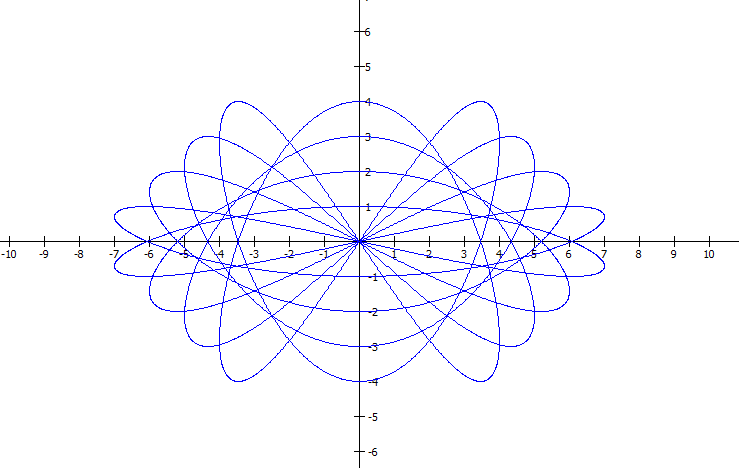
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*cos(t), y=sin(t)*sin(t)*cos(t)
x=cos(t)*sin(t), y=tan(t)*cos(t)
x=tan(t), y= sin(t)
x=sin(t)*cos(t), y=tan(t)/sin(t)
x=tan(t)/sin(t), y=cos(t)*sin(t)
x=sin(t), y=tan(t)
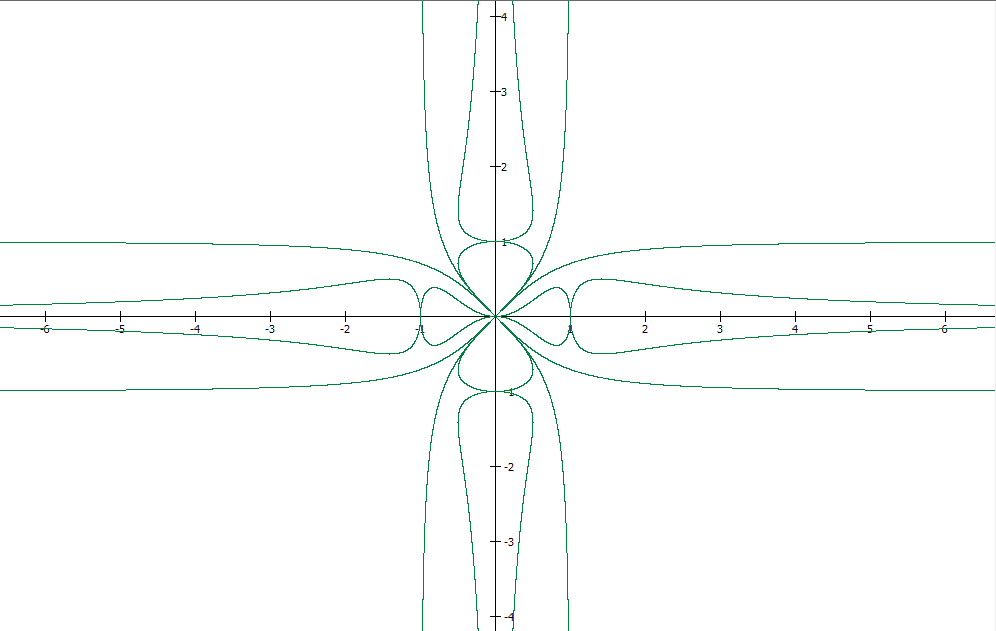
Odgovor: Zadatak 01 - Krive u ravni
x=3.5cos(t) y=6.5sin(t)cos(t)
x=3.5cos(t) y=6sin(t)cos(t)
x=3.5cos(t) y=5.5sin(t)cos(t)
x=3.5cos(t) y=5sin(t)cos(t)
x=3.5cos(t) y=4.5sin(t)cos(t)
x=3.5cos(t) y=4sin(t)cos(t)
x=3.5cos(t) y=3.5sin(t)cos(t)
x=3.5cos(t) y=3sin(t)cos(t)
x=3.5cos(t) y=2.5sin(t)cos(t)
x=3.5cos(t) y=2sin(t)cos(t)
x=3.5cos(t) y=1.5sin(t)cos(t)
x=3.5cos(t) y=1sin(t)cos(t)
x=3.5cos(t) y=0.5sin(t)cos(t)
x=1sin(t)cos(t) y=6.6cos(t)
x=2sin(t)cos(t) y=6cos(t)
x=3sin(t)cos(t) y=5.5cos(t)
x=4sin(t)cos(t) y=5cos(t)
x=5sin(t)cos(t) y=4.5cos(t)
x=6sin(t)cos(t) y=4cos(t)
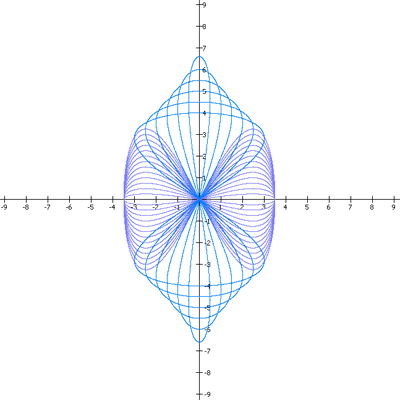
Odgovor: Zadatak 01 - Krive u ravni
Funkcije su u okviru slike, tj. screenshot-a.
Granica parametra funkcije je 0 <= t <= 2pi
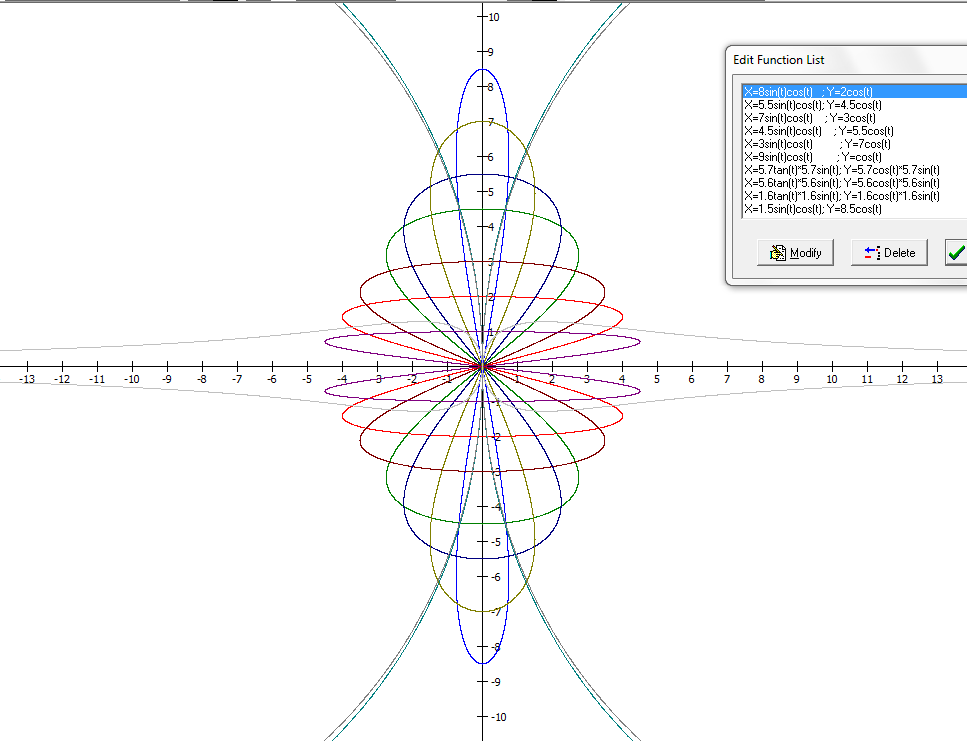
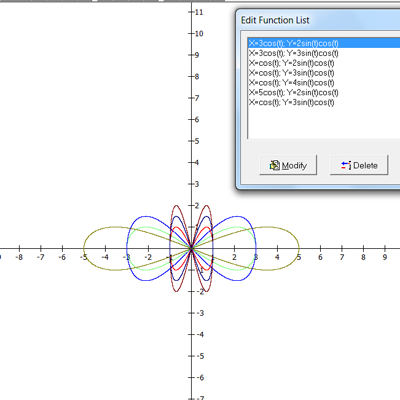
Odgovor: Zadatak 01 - Krive u ravni
x= 11tan(t) y=sin(t)tan(t)
x=10tan(t) y=2cos(t)tan(t) +0.1sin(150t)
x=9tan(t) y=3cos(t)tan(t)
x= 8tan(t) y=4cos(t)tan(t)
x= 7tan(t) y=5cos(t)tan(t)+0.1sin(150t)
x=6tan(t) y=6cos(t)tan(t)
x= 5tan(t) y=7cos(t)tan(t)+0.1sin(150t)
x=4tan(t) y=8cos(t)tan(t)
x=3tan(t) y=9cos(t)tan(t)+0.1sin(150t)
x=2tan(t) y=10cos(t)tan(t)
x=1tan(t) y=11cos(t)tan(t)+0.1sin(150t)
t=[0,2pi]
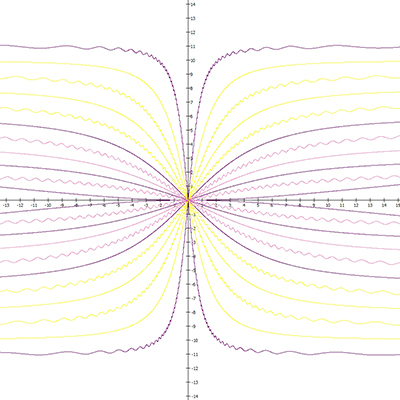
Odgovor: Zadatak 01 - Krive u ravni
x=2cos(2t) y=10sin(2t)cos(2t)
x=3cos(3t) y=11sin(3t)cos(3t)
x=y=cos(12t) y=9sin(12t)cos(12t)
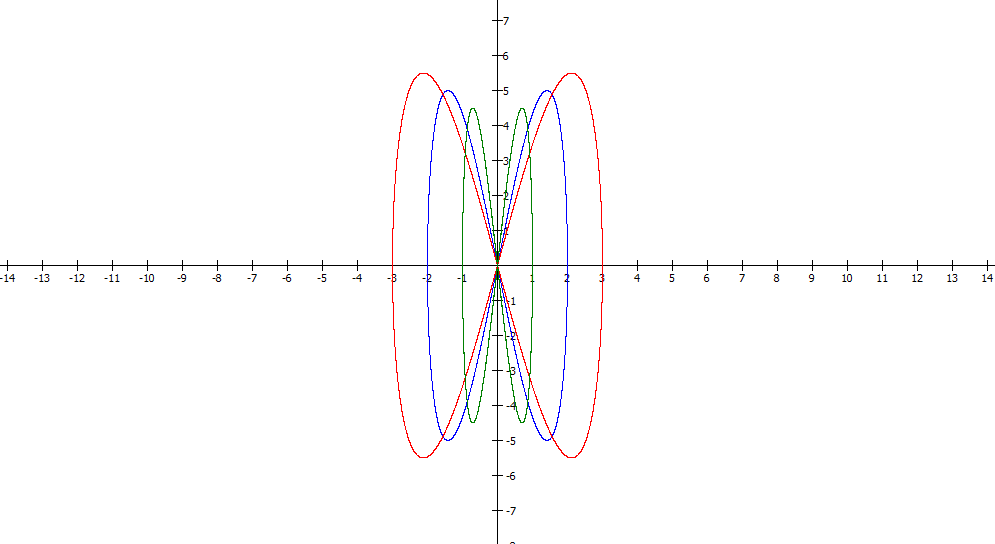
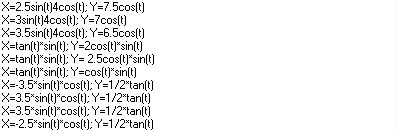
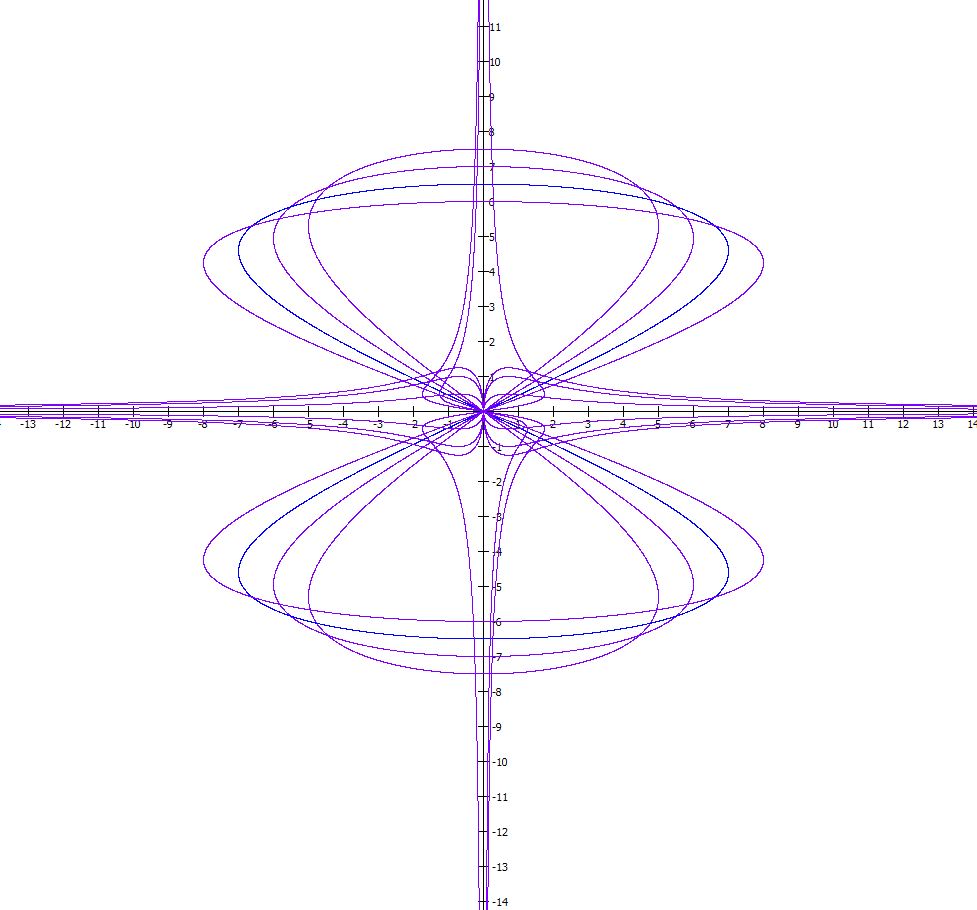
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*sin(t) y= -4cos(t)*sin(t)
x=tan(t)*sin(t) y= -2cos(t)*sin(t)
x=tan(t)*sin(t) y= cos(t)*sin(t)
x=tan(t)*sin(t) y= 3cos(t)*sin(t)
x=tan(t)*sin(t) y= 4cos(t)*sin(t)
x=tan(t)*sin(t) y= 5cos(t)*sin(t)
x=tan(t)*sin(t) y= 6cos(t)*sin(t)
x=tan(t)*sin(t) y= 7cos(t)*sin(t)
x=tan(t)*sin(t) y= 8cos(t)*sin(t)
x=tan(t)*sin(t) y= 9cos(t)*sin(t)
x=tan(t)*sin(t) y= 10cos(t)*sin(t)
x=tan(t)*sin(t) y= 11cos(t)*sin(t)
x=tan(t)*sin(t) y= 12cos(t)*sin(t)
x=tan(t)*sin(t) y= 13cos(t)*sin(t)
x=tan(t)*sin(t) y= 14cos(t)*sin(t)
x=tan(t)*sin(t) y= 15cos(t)*sin(t)
x=tan(t)*sin(t) y= 16cos(t)*sin(t)
x=tan(t)*sin(t) y= 17cos(t)*sin(t)
x=tan(t)*sin(t) y= 18cos(t)*sin(t)
0<=T<=2pi
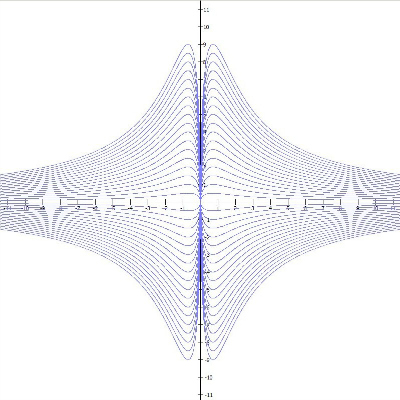
Odgovor: Zadatak 01 - Krive u ravni Katarina Jovicic
x=tan(t) y=cos(t)
x=2tan(t) y=2cos(t)
x=3cos(t) y=3tan(t)
x=2cos(t) y=2tan(t)
x=4cos(t) y=4cos(t)
x=8sin(t)*cos(t) y=8sin(t)*cot(t)
x=6cos(t)*tan(t) y=8cos(t)*8cos(t)
x=5cos(t)*tan(t)*cos(t) y=4cos(t)*sin(t)*cos(t)
x=5cos(t)*3sin(t)*tan(t) y=4tan(t)*4sin(t)*sin(t)
x=2sin(t) y=3tan(t)
x=3tan(t) y=3cos(t)
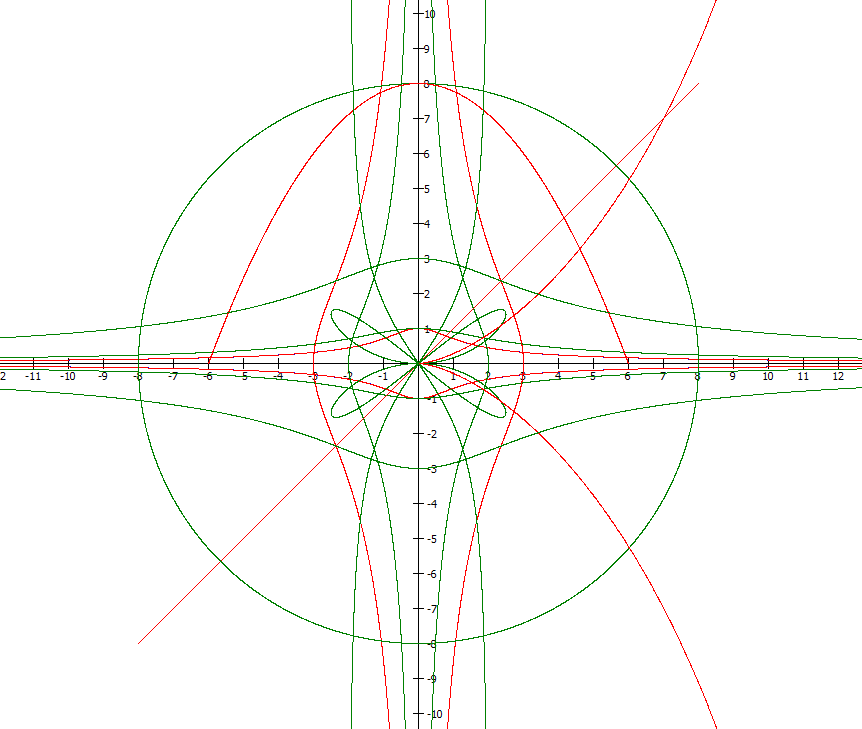
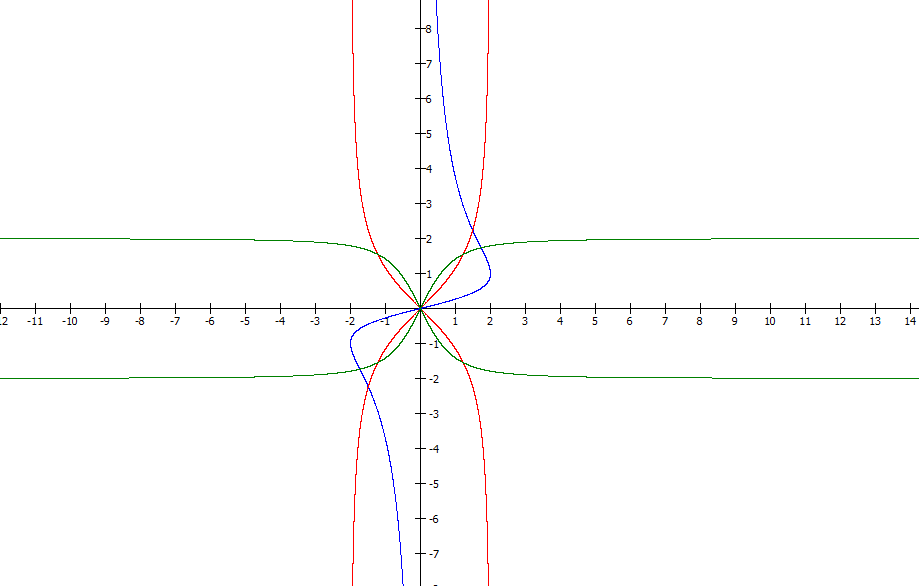
Odgovor: Zadatak 01 - Krive u ravni
X=16cos(t)*sin(t); Y=8cos(t)*tan(t)
X=32cos(t)*sin(t); Y=8cos(t)*tan(t)
X=cos(t)*sin(t); Y=6cos(t)*tan(t)
X=2cos(t)*sin(t); Y=6cos(t)*tan(t)
X=4cos(t)*sin(t); Y=6cos(t)*tan(t)
X=8cos(t)*sin(t); Y=6cos(t)*tan(t)
X=16cos(t)*sin(t); Y=6cos(t)*tan(t)
X=cos(t)*sin(t); Y=4cos(t)*tan(t)
x=tsin(t)cos(t) y=2cos(t)
x=tsin(t)cos(t) y=4cos(t)
x=tsin(t)cos(t) y=6cos(t)
x=tsin(t)cos(t) y=8cos(t)
x=tsin(t)cos(t) y=10cos(t)
x=2sin(t)cos(t) y=2cos(t)
x=4sin(t)cos(t) y=4cos(t)
x=6sin(t)cos(t) y=6cos(t)
x=8sin(t)cos(t) y=8cos(t)
x=10sin(t)cos(t) y=10cos(t)
Odgovor: Zadatak 01 - Krive u ravni
x=cos(t)*10sin(t); y=tan(3t)
x=3cos(t)*9sin(t); y=sin(t)*cos(7t)
x=2cos(t)*8sin(t); y=tan(7t)
x=8cos(t)*7sin(t); y=7sin(7t)*cos(t)
x=6cos(t)*8sin(t); y=5sin(7t)*cos(t)
x=7cos(t)*10sin(t); y=-tan(t)*10sin(t)
x=6cos(t)*9sin(t); y=-2tan(t)*9sin(t)
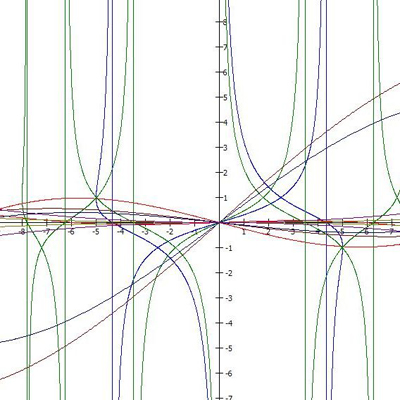
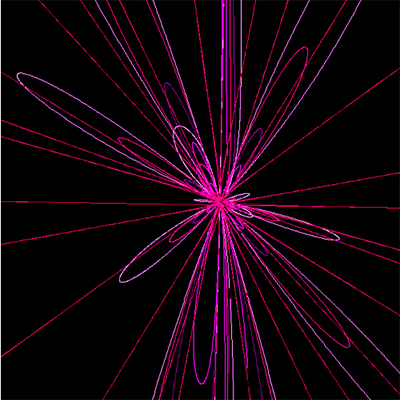
Odgovor: Zadatak 01 - Krive u ravni
x=8sin(t)*cos(t); y=29sin(t)*cos(t)*cos(t)*tan(t) ;0<=T<=pi
x=tan(t)*sin(t); y=4cos(t)*tan(t) ;0<=T<=2pi
x=5sin(t)*cos(t)*cos(t)*tan(t) ; y=5sin(t)*cos(t) ;0<=T<=2pi
x=6sin(t)*cos(t)*cos(t)*tan(t) ; y=6sin(t)*cos(t) ;0<=T<=pi
x=8sin(t)*cos(t) ; y=8sin(t)*cos(t)*cos(t)*tan(t) ;0<=T<=2pi
x=8.5sin(t)*cos(t) ; y=11sin(t)*cos(t)*cos(t)*tan(t) ;0<=T<=2pi
x=15sin(t)*cos(t)*cos(t)*tan(t) ; y=9sin(t)*cos(t) ;0<=T<=pi
x=9sin(t)*cos(t) ; y=19sin(t)*cos(t)*cos(t)*tan(t) ;0<=T<=2pi
x=24sin(t)*cos(t)*cos(t)*tan(t) ; y=8.5sin(t)*cos(t) ;0<=T<=2pi
x=34sin(t)*cos(t)*cos(t)*tan(t) ; y=8sin(t)*cos(t) ;0<=T<=2pi
x=38sin(t)*cos(t)*cos(t)*tan(t) ; y=7.5sin(t)*cos(t) ;0<=T<=2pi
x=45sin(t)*cos(t)*cos(t)*tan(t) ; y=5.5sin(t)*cos(t) ;0<=T<=2pi
x=6sin(t)*cos(t)*cos(t)*tan(t) ; y=50sin(t)*cos(t)*cos(t)*tan(t) ; 0<=T<=2pi
x=50sin(t)*cos(t)*cos(t)*tan(t) ; y=5sin(t)*cos(t) ;0<=T<=pi
x=60sin(t)*cos(t)*cos(t)*tan(t) ; y=4sin(t)*cos(t) ;0<=T<=2pi
x=73sin(t)*cos(t)*cos(t)*tan(t) ; y=3sin(t)*cos(t) ;0<=T<=pi
x=84sin(t)*cos(t)*cos(t)*tan(t) ; y=2sin(t)*cos(t) ;0<=T<=2pi
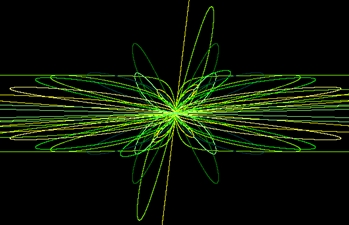
Odgovor: Zadatak 01 - Krive u ravni
X=TTT; Y=TTT
X=-TTT;Y=-TTT
X=TTTT;Y=TTTTTTTTT
X=-TTTT;Y=TTTTTTTTT
X=-TTTT;Y=-TTTTTTTTT
X=TTT;Y=-TTTTTTTTT
X=TTTTT;Y=-TTTTTTTTT
X=TTTTTTTT;Y=TTT
X=TTT;Y=TTTTT
X=-TTT;Y=T
X=-TTTT;Y=-TTTTTTT
X=TTTTTT;Y=-TTTTTTTT
X=-TTTT;Y=-TTTTTTT
X=-TTTT;Y=-TTTTTT
parametarske granice 0-2pi
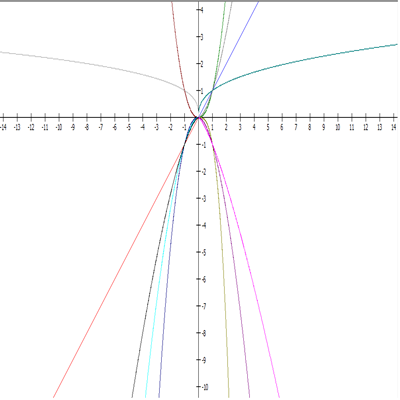
Odgovor: Zadatak 01 - Krive u ravni
x=sin(2t)*cos(t) ; y=tan(t) ;
x=tan(t) ; y=sin (2t) * 6cos(t) ;
x=tan(t) ; y=sin(2t)*9cos(t) ;
x=tan(t) ; y=sin(2t)*6cos(t) ;
x=5*tan(t) ; y=sin(3t)*5cos(t) ;
x=2*tan(t) ; y=sin(4t)*9cos(t) ;
parametarske granice 0-2pi
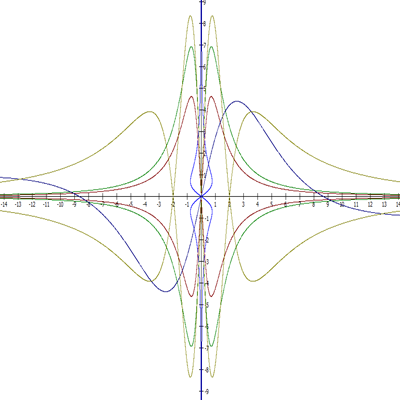
Odgovor: Zadatak 01 - Krive u ravni
x = sin(4t)*cos(t/8), y = cos(2t)
x = sin(8t)*cos(t/16), y = cos(2t)
x = sin(16t)*cos(t/32), y = cos(2t)
x = sin(32t)*cos(t/64), y = cos(2t)
x = cos(2t) , y = sin(4t)*cos(t/8)
x = cos(2t) , y = sin(8t)*cos(t/16)
x = cos(2t) , y = sin(16t)*cos(t/32)
x = cos(2t) , y = sin(32t)*cos(t/64)
granica 0 < t < 2pi
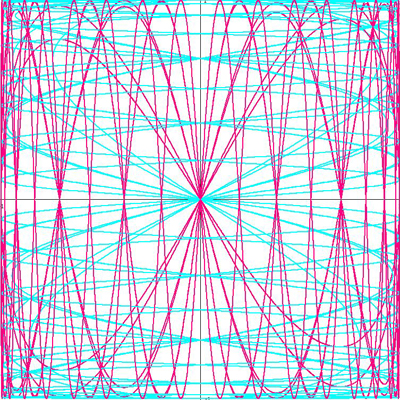
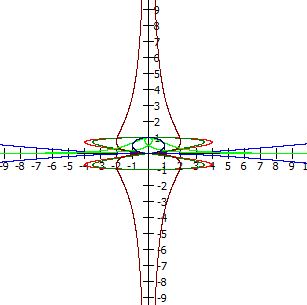
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)cos(t) y=3cos(t)
x=3sin(t)cos(t) y=3cos9t)
x=2sin(t)cos(t) y=cos(t)
x=2sin(3t) y=5cos(t)sin(t)
x=4sin(2t) y=2cos(4t)sin(t)
x=6sin(t)cos(t) y=7cos(t)
x=8sin(t)cos(t) y=6cos9t)
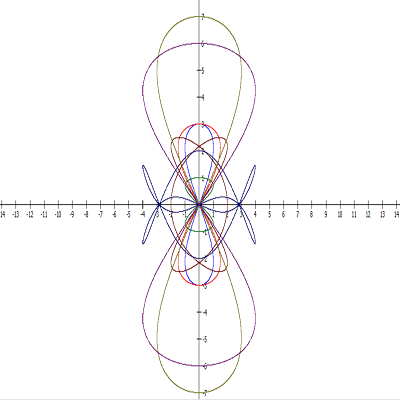
Odgovor: Zadatak 01 - Krive u ravni
8sin(t)cos(t) 1cos(t)
6sin(t)cos(t) 4cos(t)
5sin(t) 3cos(t)
sin(2t)cos(t) cos(2t)sin(t)
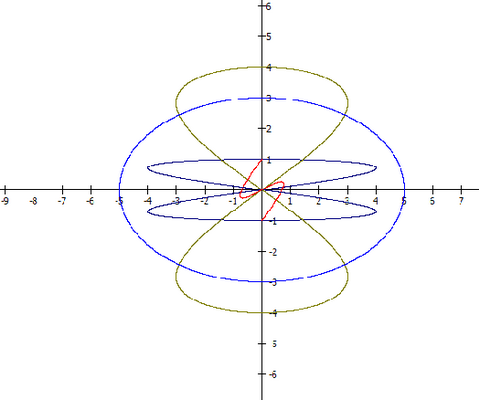
Odgovor: Zadatak 01 - Krive u ravni
X=3sin(t)*5cos(t); Y= 2cos(3t);
X=2sin(t)*1cos(t); Y= 4cos(3t);
X=3sin(t)*5cos(t); Y= 6cos(3t);
X=2sin(t)*1cos(t); Y= 8cos(3t);
X=3sin(t)*5cos(t); Y= 10cos(3t);
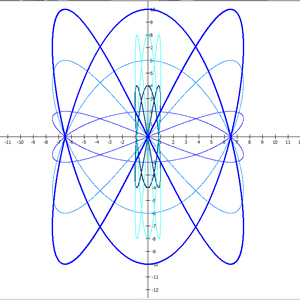
Odgovor: Zadatak 01 - Krive u ravni
x=tan(t)*sin(2t)*cos(3t)
y=tan(t)
x=cos(3t)*sin(6t)
y=tan(t)
x=sin(t)*tan(2t)
y=cos(2t)*tan(t)
x=cos(t)*tan(2t)
y=tan(t)
x=tan(t)
y=sin(t)*cos(2t)
x=tan(t)
y=sin(2t)*cos(3t)
x=tan(t)
y=sin(3t)*cos(4t)
0<=T<=2pi
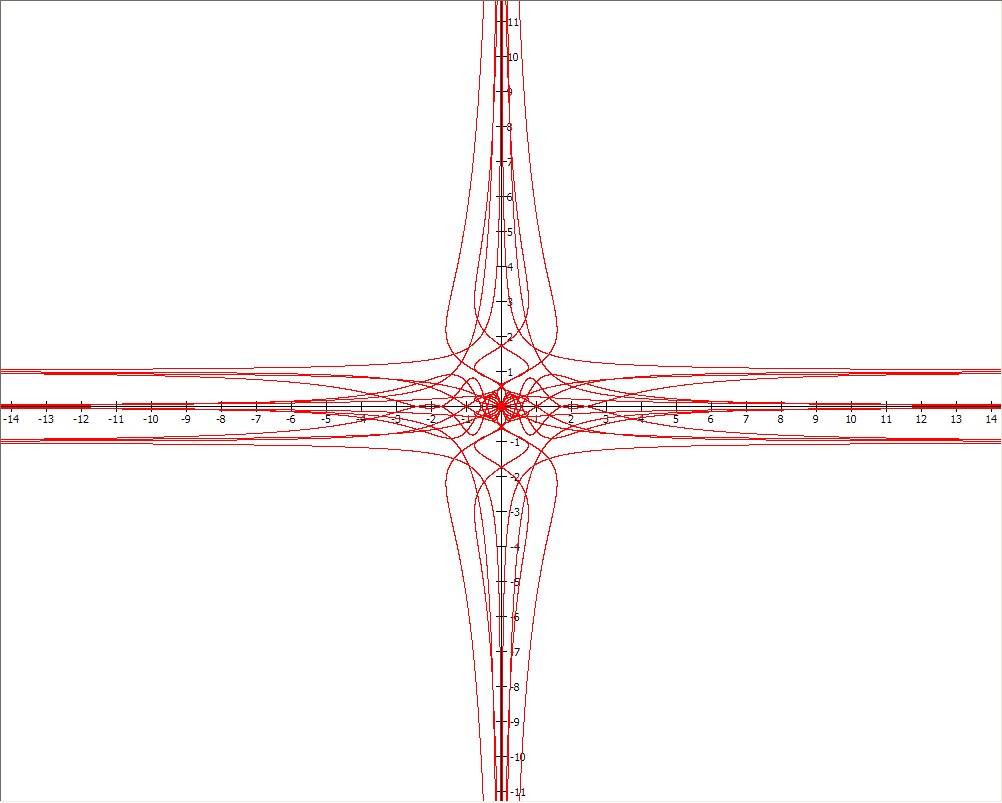
Odgovor: Zadatak 01 - Krive u ravni
x=12cos(5t)*3sin(t)*cos(t) Y=9sin(2t)*2cos(t)
x=9cos(t)*2sin(t) Y=9sin(2t)*cos(t)
x=12cos(t)*2sin(t) Y=16sin(2t)*3cos
x=12cos(5t)*2sin(t)*cos(t) Y=9sin(2t)*2cos(t)
x=4tan(t)*4sin(t)*sin(t) Y=3cos(t)*cos(5t)*sin(5t)
0<=t<=2pi
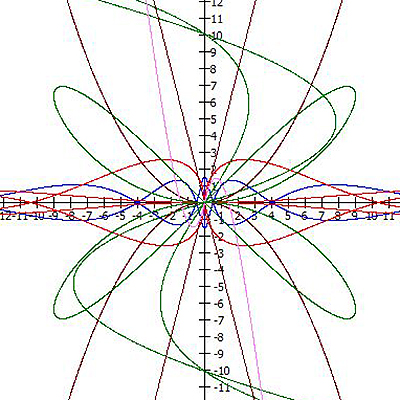
Odgovor: Zadatak 01 - Krive u ravni
0<=T<=2pi
x=tan(t)*2sin(t) y=sin(t)*cos(t)
x=tan(t)*3sin(t) y=2sin(t)*cos(t)
x=tan(t)*4sin(t) y=3sin(t)*cos(t)
x=tan(t)*5sin(t) y=4sin(t)*cos(t)
x=tan(t)*6sin(t) y=5sin(t)*cos(t)
x=tan(t)*7sin(t) y=6sin(t)*cos(t)
x=tan(t)*8sin(t) y=7sin(t)*cos(t)
x=tan(t)*9sin(t) y=8sin(t)*cos(t)
x=tan(t)*10sin(t) y=9sin(t)*cos(t)
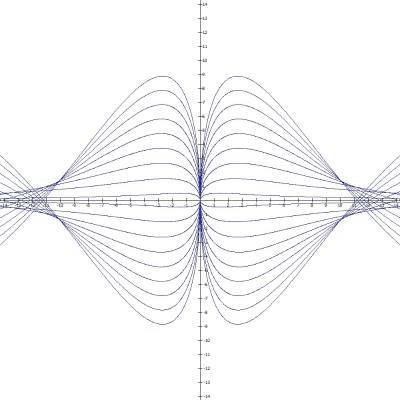
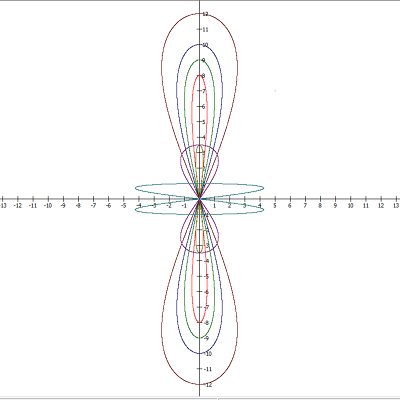
Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)*1cos(t)
y=8cos(4t)
x=3sin(t)*5cos(t)
y=6cos(3t)
x=5sin(t)*2cos(t)
y=6cos(2t)
x=4sin(t)*3cos(t)
y=8cos(2t)
x=5sin(t)cos(t)
y=1cos(t)
x=sin(3t)cos(2t)
y=cos(7t)sin(t)
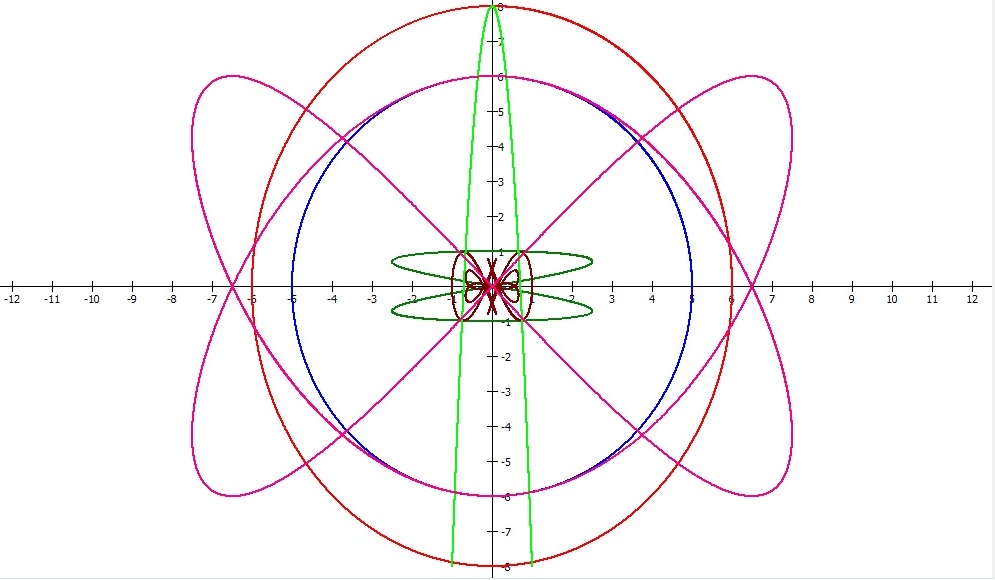
Re: Zadatak 01 - Krive u ravni
x=4sin (3t) *tan (t)y= cos(t) 0=t=2pi
x=sin (4t) y= tan (4t) *2sin (t) 0=t=2pi
x=6cos (t) *sin (2t) y=cos (4t) 0= t=2pi
x=sin (4t) *tan (2t) y = 2tan (t) *sin (4t) 0=t=2pi
x=4sin (4t) *cos (2t) y=tan (4t) 0=t=2pi
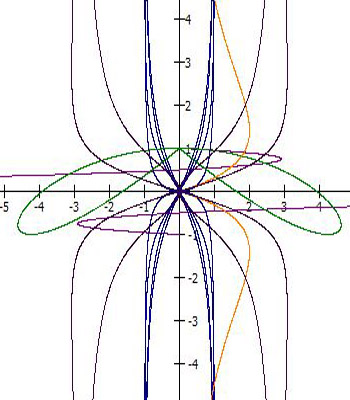
Odgovor: Zadatak 01 - Krive u ravni
Y=f(x)=cos(2x)
Y=f(x)=2cos(2x)
Y=f(x)=3cos(2x)
Y=f(x)=4cos(2x)
Y=f(x)=5cos(2x)
Y=f(x)=6cos(2x)
Y=f(x)=7cos(2x)
Y=f(x)=8cos(2x)
Y=f(x)=9cos(2x)
Y=f(x)=10cos(2x)
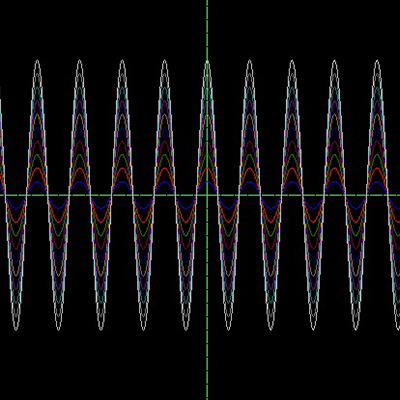
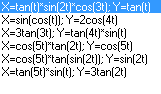

Odgovor: Zadatak 01 - Krive u ravni
x=2sin(t)cos(t); y=6cos(t)
x=2sin(t)cos(t); y=5cos(t)
x=2sin(t)cos(t); y=4cos(t)
x=2sin(t)cos(t); y=3cos(t)
x=2sin(t)cos(t); y=2cos(t)
x=6sin(t) y=3sin(t)cos(t)
x=5sin(t) y=3sin(t)cos(t)
x=4sin(t) y=3sin(t)cos(t)
x=3sin(t) y=3sin(t)cos(t)
X=2sin(t) y=3sin(t)cos(t)
x=6sin(t)cos(t) y=3cos(t)
x=5sin(t)cos(t) y=3cos(t)
x=4sin(t)cos(t) y=3cos(t)
x=3sin(t)cos(t) y=3cos(t)
x=2sin(t)cos(t) y=3cos(t)
0<=T<=2pi
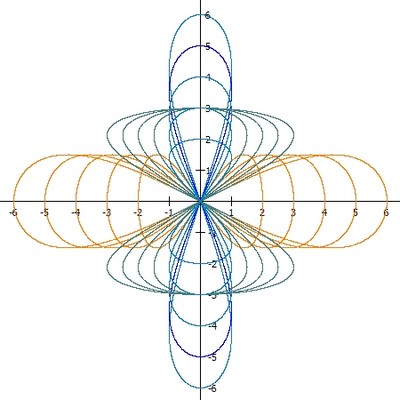
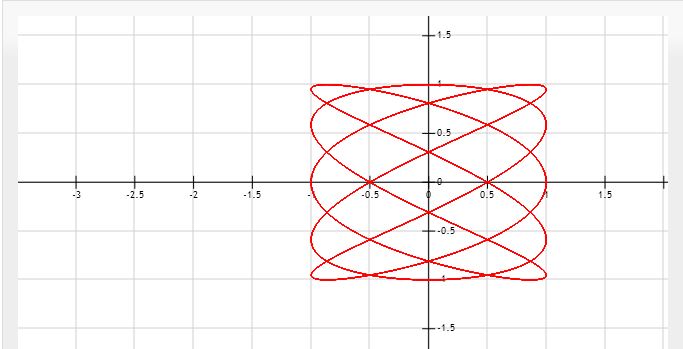
Odgovor: Zadatak 01 - Krive u ravni
X= cos(t)*sin(t) ; Y= tan(t)*cos(t)
X= 2cos(t)*sin(t) ; Y= 2tan(t)*cos(t)
X= 3cos(t)*sin(t) ; Y= 3tan(t)*cos(t)
X= 4cos(t)*sin(t) ; Y= 4tan(t)*cos(t)
X= 5cos(t)*sin(t) ; Y= 5tan(t)*cos(t)
X= 6cos(t)*sin(t) ; Y= 6tan(t)*cos(t)
X= 7cos(t)*sin(t) ; Y= 7tan(t)*cos(t)
X= 10tan(t)*cos(t)^2 ; Y= 10cos(t)*sin(t)^2
X= 15tan(t)*cos(t)^2 ; Y= 15cos(t)*sin(t)^2
X= 20tan(t)*cos(t)^2 ; Y= 20cos(t)*sin(t)^2
X= 25tan(t)*cos(t)^2 ; Y= 25cos(t)*sin(t)^2